
☞罗盘定位测量原理:
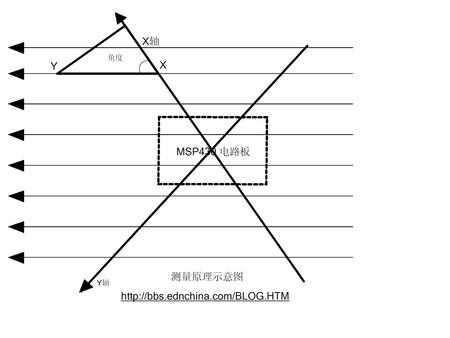
电子指南针也叫‘数字指南针’,应用原理通用是利用地磁场来定位南极与北极 。主要利用磁性材料的磁阻效应制成的所谓【磁阻传感器】。磁性材料(如坡莫合金)具有各向异性,对它进行磁化时,其磁化方向将取决于材料的易磁化轴、材料的形状和磁化磁场的方向和磁通门加工和专用MCU控制开发的电子罗盘。主要由两个相互垂直的磁感应传感器分别测出X方向和Y方向的磁场强度,X方
向和Y方向的矢量和就为偏移的方向。偏移的角度可由以下公式算出:
ANGLE = ARCTAN(Y/X)
在其它象限方法类似。当某个轴的磁感应传感器平行于地磁场方向并且与其
同向,该轴测量出来的值是最大的,而另外一个垂直于地磁场方向的轴的值达到
零(两个传感器绝对垂直的情况下)。而当某个轴的磁感应传感器平行于地磁场
方向并且与其反向,该轴测量出来的值是最小的,而另外一个垂直于地磁场方向
的轴的值达到零。
磁感应传感器应用芯片采用的是PNI公司的PNI SEN R65磁感应传感器,驱
动芯片用的是PNI公司的PNI 11096,PNI 11096 可以测3 个方向的磁场强度,
X,Y和Z方向。但系统并不需要3个方向,所以模块只做了X和Y方向的测量。
这个传感器模块跟超声波传感器模块一样,要插在MSP430F1232 小系统上才能工作,对外
用485 通信,这个传感器模块与MSP430F1232 小系统之间通过SPI 总线来通信。
焊接时,两个磁感应传感器要尽量垂直,但是并不能做到绝对的垂直,
所以测量出来的结果是有误差的,这个误差可以通过软件来进行修正。还有一个
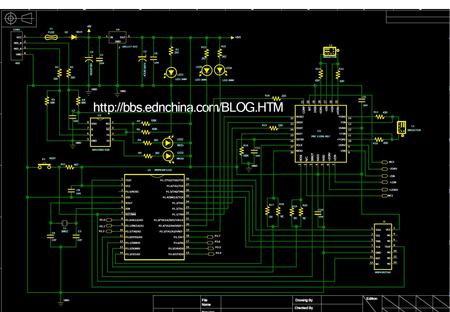
要注意的地方是磁感应传感器是放在一个LR振荡电路中来进行测量的,L就是
磁感应传感器,一个磁感应传感器要对应两个电阻R,也就是电路图中的电阻Rb,
这两个电阻最好选用精密的电阻,而且阻值尽量要一致,因为PNI11096使用双
极性有区别的测量设计来使得磁场的测量不受温度的影响,这也有利于将测量范
围转移到以0为中心的正负对称的范围。
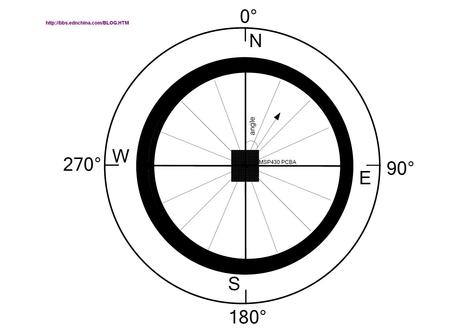
☞罗盘方位:
罗盘方位收集数据作如下所示,方位指南针模块旋转一周为360度来定位方向,角度如下图所示。




 /4
/4 






文章评论(0条评论)
登录后参与讨论