
农用机械转速报警控制器使用AT89S52单片机为核心控制单元,通过外接霍尔传感器输入转速信号实现转速测量与报警。控制器主要实现轴流滚筒、复脱机、风扇机和籽粒机转速的获取,通过专用的霍尔传感器,将实时的转速信息通过DB9针接口传输至控制器,经过施密特触发器整形后由单片机进行频率的测量,并且通过液晶、发光二极管和蜂鸣器与用户交互。
四屏农用机械转速报警器系统的总体架构如图1所示:
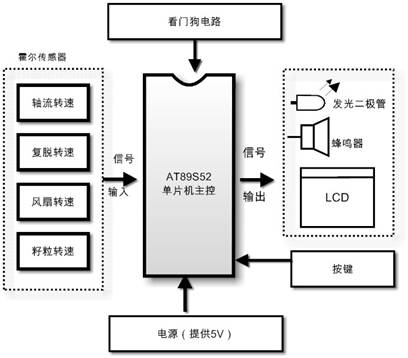
图1四屏农用机械转速报警器系统总体框架
四屏农用机械转速报警系统主要是将四种从霍尔传感器采集的转速经过处理之后,将信号通过通过发光二极管、蜂鸣器、LCD显示出来,通过按键进行用户之间的交互。
农用机械转速报警器共包括电源控制、单片机控制、双色二极管控制、发光二极管控制、单片机看门狗电路、按键控制、液晶显示控制和霍尔传感器输入信号控制9部分组成。控制部分以AT89S52为主要控制芯片,通过向该芯片编程实现将霍尔传感器的信号进行测试,并且从液晶显示出来,并且通过按键进行交互实现报警开关和报警值的改变。
图2 单片机控制电路
如图2,该部分的主要控制模块为AT89S52组成的单片机控制模块,以+5V供电,晶振为12MHZ,保证单片机的正常运行。为了实现蜂鸣器、发光二极管等的驱动,故在输出控制的IO口上加了10KΩ排阻。
At89s52 是一种低功耗、高性能CMOS8位微控制器,具有 8K 在系统可编程Flash 存储器。使用Atmel 公司高密度非 易失性存储器技术制造,与工业80C51 产品指令和引脚完 全兼容。片上Flash允许程序存储器在系统可编程,亦适于 常规编程器。在单芯片上,拥有灵巧的8 位CPU 和在系统 可编程Flash,使得AT89S52为众多嵌入式控制应用系统提 供高灵活、超有效的解决方案。 AT89S52具有以下标准功能: 8k字节Flash,256字节RAM, 32 位I/O 口线,看门狗定时器,2 个数据指针,三个16 位 定时器/计数器,一个6向量2级中断结构,全双工串行口, 片内晶振及时钟电路。另外,AT89S52 可降至0Hz 静态逻 辑操作,支持2种软件可选择节电模式。空闲模式下,CPU 停止工作,允许RAM、定时器/计数器、串口、中断继续工 作。掉电保护方式下,RAM内容被保存,振荡器被冻结, 单片机一切工作停止,直到下一个中断或硬件复位为止。
图3 单片机看门狗电路
如图3所示,该部分是以MAX813为主的单片机看门狗电路,该电路可以为单片机产生复位信号,可以保证在上电、掉电、电压过低时产生复位信号,可以有效的克服干扰信号,实现单片机系统的稳定性和可靠性。
图4 电源控制
电源控制部分电路主要使用LM2576作为主要稳压芯片,输入电压在7V~12V的宽电源输入范围,保证单片机及其他电路5V供电正常。
所使用的LM2576系列是美国国家半导体公司生产的3A电流输出降压开关型集成稳压电路,它内含固定频率振荡器(52kHz)和基准稳压器(1.23V),并具有完善的保护电路,包括电流限制及热关断电路等,利用该器件只需极少的外围器件便可构成高效稳压电路。LM2576系列包括 LM2576(最高输入电压40V)及LM2576HV(最高输入电压60V)二个系列。各系列产品均提供有3.3V(-3.3)、5V(-5.0)、12V(-12)、15V(-15)及可调(-ADJ)等多个电压档次产品。此外,该芯片还提供了工作状态的外部控制引脚。本系统主要使用的是该系列中的LM2576-5V。
图5 输入信号控制电路
由霍尔传感器的得到的4路信号由DB9串行口输入,经过74LS14施密特触发器将信号传入单片机的IO口。其中DB9口中有三根是信号转速线,用于传输轴流滚筒、风扇、籽粒器和复脱器的信号输入,74LS14芯片会将输入信号进行取反,输给IO口标准矩形波。另外,本次设计中将板子做成多种兼容,可以通过电阻的跳接进行不同的选择,避免重复做板子。
图6 发光二极管的控制电路
三个发光二极管分别是报警灯、高转速和低转速的显示电路,用9013驱动。其中,控制口高电平时9013导通,二极管不亮。故要点亮发光二极管,需要控制口输出高电平。
图7 双色发光二极管控制电路
如图7,双色二极管控制电路,分红绿两种颜色显示,当对应的控制口输出高电平即可。
图8 液晶显示控制电路
报警器的LCD显示控制电路如图8,电路中的两个液晶使用的是相同的控制方式,程序基本一致,液晶驱动使用的是凌阳的SPLC100芯片,通过控制IO口串行传输数据。
图9 按键控制电路
如图9,为按键控制电路,两个按键分别控制报警开/关和轴流滚筒报警值的转换。其中,在按键按下之前控制的IO口是低电平,按下之后为高电平,可以通过检测对应IO口的电平来检测按键的状态。
图10 蜂鸣器控制电路
如图10,蜂鸣器控制电路中使用了2级9013进行驱动,在对应控制IO口是高电平的时候将蜂鸣器导通发声。
农用机械转速报警器系统的软件流程图如图11所示:
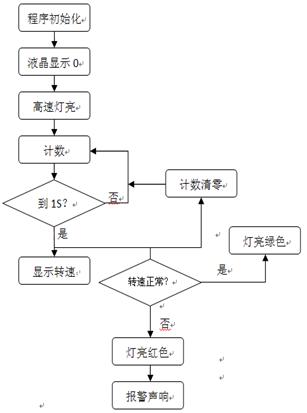
图11 软件流程图
软件设计思路:首先对整个控制系统进行初始化,液晶屏左右屏均显示0,双色二极管不亮。如果此时按下按键,报警指示灯和高低速指示灯应切换。为了防止按键抖动产生误操作,加入按键防抖动程序。将连接霍尔传感器的DB9插头插上,给B3报警器检测工装通电,调节轴流滚筒、复脱器、升运器的电位器,使霍尔传感器输出的信号发生变化,通过计数程序进行分通道计数,并将各通道的计数值显示在液晶屏上,如果任意一路的转速值不正常就报警,并且该路的指示灯变红色,如果该路转速正常就亮绿色。报警时,如果按下报警开关的关,报警声就停止。将高度传感器接到主机上,移动磁钢,高度应随着磁钢位置的不同而变化。
该产品的主要调试过程包括硬件和软件两部分。其中,硬件调试先画出原理图,确定单片机的控制引脚,为软件调试奠定基础。软件调试时,首先通过软件仿真,然后,将霍尔传感器的三路信号分开调试最终合并调试的方法实现。调试信号的时候,先是利用函数信号发生器模拟霍尔传感器的输入来调整报警器的精确度,最后,利用霍尔传感器进行实际测量。
报警器测试数据实现如下:
1) 给电路板上电,液晶屏显示0,双色发光二极管不亮,按动按键,报警指示灯和高速低速灯可以切换。
2) 报警开关和高低速按键灵活。
3) 将函数发生器产生的模拟信号直接输入信号输入IO口,进行测试,显示数据准确,可以保证在±5转之间。
4) 可以实现报警器主要参数和功能完整、准确的实现。
开发平台:Keil C51
开发工具:ISPlay 1.25



 /4
/4 






文章评论(0条评论)
登录后参与讨论