原创
步进电机驱动-安森美电流自适应芯片LV8702V笔记
先看看为什么现在高效能的步进电机驱动芯片受到关注:
发热:这样系统需要加额外的风扇来排热,以及需要更大的散热片。体积更大。
震动:终端客户对噪声要求更高,以及尺寸的要求,需要紧凑。
根据以往的经验,减少发热有三个途径:
1、DMOS,内部MOS的RON更小,发热更小。
2、电流自适应,空载时候半流,或者闭环检测负载,自动调节电流。
3、优化PWM斩波,以及斩波频率,降低MOS开关损耗。
下面看LV8702V怎么解决这样的问题:
-
嵌入两相PWM电流控制电路
-
Ron=0.3+0.25,减少发热。
-
细分模式,这个大部分芯片细分都比这个高,没优势
-
脉冲控制,短路保护
-
无需控制电源,内部5V调整管
-
嵌入高效驱动功能
-
嵌入步进输出检测功能
-
BICDMOS,最大2.5A,嵌入过热保护
典型应用在:打印机,复印机,扫描仪,工业控制,娱乐设备,纺织。
另外几个重要的参数和功能值得关注:
电压电流:36V,2.5A
VREF电流设置电压:最大3V
Ron=0.3+0.25
斩波频率,50KHZ推荐
充电泵输出:28.7V
时钟125K
输入功能描述
-
芯片使能:待机模式和工作模式,内部调整管无输出,充电泵停止工作,所有的逻辑复位。当ST为悬空或者低电平的时候,将工作为待机模式。
-
脉冲输入:同样为上升沿触发步进,这里要注意的是,输入的最小脉宽是12.5us,但是在恒流控制的时候,斩波频率入股太慢,则可能在一个步进阶梯内没有一次斩波。
-
输入的时序,这个时间规定,设置的值必须保持一定的时间长度,具体看手册。
-
位置检测,开漏输出,在初始化位置时输出ON状态。
-
参考电流设置:VREF/5分压后输出,公式为Iout=VREF/5/RF。如果电流不需要控制,直接在饱和条件下,可以直接设置VREF=5V,否认需要VREF在推荐范围之类,同时,采样电阻的功率为PD=I2RF,设计的时候需要考虑采样电阻的功率。
-
复位:复位会丢失位置,为高时复位,为低时在下一个上升沿在初始化位置继续步进。
-
输出使能:这个允许脱机,输出为高阻,但是逻辑电路还在工作,步进继续在进行,只是功率电路没工作。
-
方向:这个功能都一样,没什么不同。
-
斩波频率设置:Fchop = Ichop/(Cchop × Vtchop × 2) (Hz) 比如200pf对应50KHZ,这个频率的设置,过大,则开关损耗变大,发热大,如果设置太小,则电流纹波大,噪声大,可以在40KHZ到125KHZ的范围设置。
-
空白时间周期:这个在很多芯片中没有说明,本芯片固定为1us,避免在衰减到充电过程中,开关产生的噪声误操作。
-
输出电流向量,这个处理很简单,4级向量分别为38%,70%,92%,100%。这里注意,有两个2细分模式,一个是第一梯为70%,第二梯为100%,而满力矩情况,直接到100%,100%。
-
细分切换:细分可以在工作的时候进行切换,各种不同的细分切换表格在手册中可以找到。
-
各种细分下的电流波形,可以根据电流向量表推导出来,具体看手册。
-
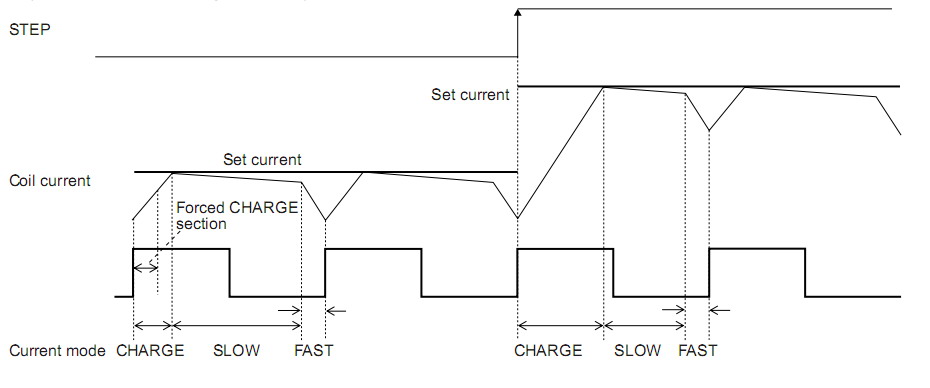
电流控制操作说明(PWM斩波)
这个是电机运行效果的核心部分,电流增加的波形如下:
三个过程,充电,慢衰减,快衰减。在电流下降的过程中直接跳过慢衰减,充电后,然后立刻进行快衰减。
这里有几个重要参数,充电时间好说,慢衰减和快衰减的时间比重呢?
电流比较后,如果绕组电流小于参考电流,则充电到超过参考电流,然后进行慢衰减,最后1us进行快衰减。如果是下降的过程中,强制充电完成,发现绕组电流还比参考电流大,则立刻还是快衰减过程。
-
高效率驱动功能,这个是芯片的特色,看如何实现:当高效能功能打开,Iout自动在设置的电流范围内调整,当高效能模式关闭的时候,电流输出最大值为Vref设置的值。当没有带负载的情况下,这种高效能模式不稳定,建议关闭。
-
使能:通过GAD引脚来使能,如果在整步或者GAD=H的情况下,此模式无效。如果调整GMG和GST,如果电机突然加速或者负载变化超出调整期的范围,则不能够跟随,导致电机丢步。这个时候需要暂时关闭高效能模式,工作于低速也建议关闭此功能。当然有负载的情况下,低速时候也可以打开。
-
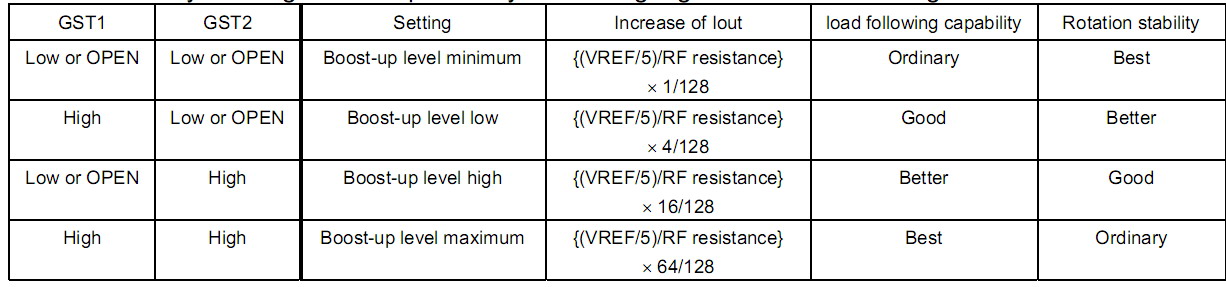
高效能模式的余量调整:
上面的表格中,可以设置余量,比如如果设置为00,则余量是最小的,功耗也是最小的,但是带负载的能力就比较低。当然这样可以设置“上举”的功能,但是轻微的负载变化都会产生“上举”操作。可以这样来设置这两个参数:将"上举"设置
最小,此时负载能够稳定工作,就OK.
-
上举功能:从上面我们可以看出上举的好处,当然上举也是有严重的缺陷的,就是电流变化比较大,会引起电机的震动,设置的表格如下:
-
-
另外跟上举有关的电路,还有需要外接两个电阻以及一个滤波电容,这个电阻越大越好,在手册中有推荐的值。
-
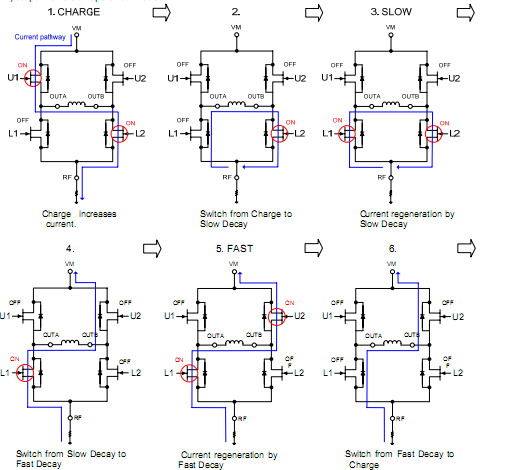
晶体管的输出模式
其中,这六个过程,有2,4,6三个过程只是一个过度的过程,时间很短,是防止交叉电流的产生。
其他的保护功能以及电流的波形,可以在手册的设计参考中找到,根据上面的内容很容易理解。





 /1
/1 







文章评论(0条评论)
登录后参与讨论