
MCU使用三星S3F9454,接口只需要三个IO口,如其Data_sheet所示。下面的程序流程图可与程序相印证,仅供参考。
<?xml:namespace prefix = v /> 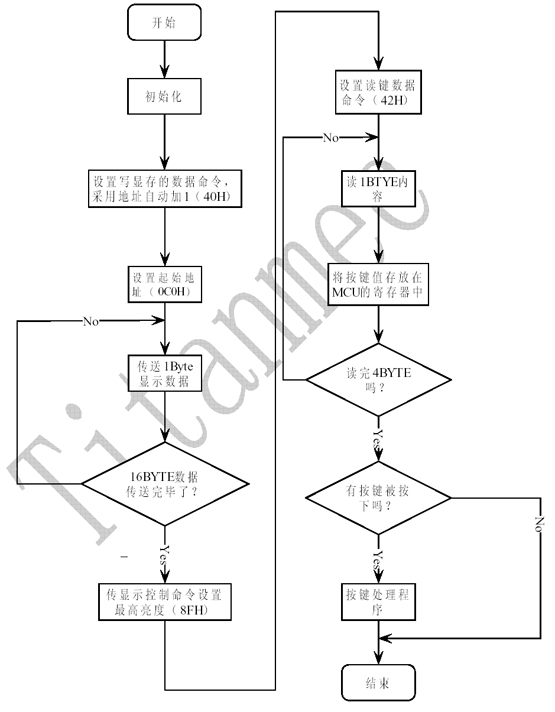
//=========================================================
//
// MCU: S3F9454@内部3.2Mhz
//=========================================================
#include "ioS3C9454.h"
#include "intrinsics.h"
#include "app01.h"
#define uchar unsigned char
#define uint unsigned int
#define ulong unsigned long
#define nop (__no_operation())
#define di (__disable_interrupt())
#define ei (__enable_interrupt())
// data for TM6219b,refrent 采用自动加一地址程序流程
#define Cnt_CWdata 0
#define Cnt_CA 1
#define Cnt_CD 18
#define Cnt_CRdata 19
#define Data_CWdata 0X40
#define Data_CA 0XC0
#define Data_CD 0X8F
#define Data_CD_OFF 0X87
#define Data_CRdata 0X42
#define Tm6219CntMax 192
#define Tm6219CntRead 160
//----- const code / 表 -----
__code const volatile uchar SmartOption[4] @0x003c = {0x0,0x0,0x67,0x00};// 不允许低电压复位;外部8M晶振
__code const volatile uchar DigitCode[16] @0x0040 = ////数码管显示代码定义(在ROM=0X40)
{
0x3f, //'0'
0x06, //'1'
0x5b, //'2'
0x4f, //'3'
0x66, //'4'
0x6d, //'5'
0x7d, //'6'
0x27, //'7'
0x7f, //'8'
0x6f, //'9'
0x77, //'A'
0x7C, //'b'
0x39, //'C'
//0x5E, //'d'
0x00, //'d' viod
//0x79, //'E'
0x38, //'E' L
//0x71, //'F'
0x76, //'F' H
};
//----- interrupt / 中断 -----
#pragma vector="0x00"
__interrupt void int_9454() //中断函数
{
}
//----- option_reload_pro 配置重载 -----
void option_reload_pro( void )
{
// T0CON = T0CON_D;
CLKCON = CLKCON_D;
BTCON = BTCON_D;
if( TBuzzer )
P0CONH = P0CONH_BB_D;
else
P0CONH = P0CONH_D;
P0CONL &= P0CONL_A_D;
P0PND = P0PND_D;
// P1CON = P1CON_D;
P2CONH = P2CONH_D;
P2CONL = P2CONL_D;
PWMDATA = PWMDATA_D;
PWMCON = PWMCON_D;
STOPCON = STOPCON_D;
ei; // SAM88RCRI interrupt pending
}
//----- initial_pro / 初始化 -----
void initial_pro( void )
{
di;
option_reload_pro();
ei; // SAM88RCRI interrupt pending
// for constant data be
Buff0 = SmartOption[0];
}
//--------------- display_drive_pro / 显示驱动 ---------------
void display_drive_pro( void )
{
if( Buff0 >= Tm6219CntMax )
Tm6219Cnt = 0;
if( ( Tm6219Cnt & 0X7 ) == 0 )
{ // detect data or command transf
// and insert STB set
Buff0 = Tm6219Cnt; // and get new data buff
Buff0 >>= 3;
if( Buff0 == Cnt_CWdata ) O_STB_PORT |= (1<<O_STB_B);
else if( Buff0 == Cnt_CA ) O_STB_PORT |= (1<<O_STB_B);
else if( Buff0 == Cnt_CD ) O_STB_PORT |= (1<<O_STB_B);
else if( Buff0 == Cnt_CRdata ) O_STB_PORT |= (1<<O_STB_B);
if( Buff0 <= Cnt_CRdata )
Tm6219DataBuff = Tm6218Data[Buff0];
}
if( Tm6219Cnt < Tm6219CntRead )
{
// normal transf
P0CONL = P0CONL_O_D;
O_STB_PORT &= ~(1<<O_STB_B);
if( Tm6219DataBuff & 0X1 )
{
O_DIO_PORT |= (1<<O_DIO_B);
}
else
{
O_DIO_PORT &= ~(1<<O_DIO_B);
}
O_CLK_PORT &= ~(1<<O_CLK_B);
Tm6219DataBuff >>= 1;
Tm6219Cnt++;
O_CLK_PORT |= (1<<O_CLK_B);
}
else
{ // Key read
P0CONL = P0CONL_R_D;
O_STB_PORT &= ~(1<<O_STB_B);
O_CLK_PORT &= ~(1<<O_CLK_B);
Tm6219DataBuff >>= 1;
if( I_DIO_PORT & (1<<I_DIO_B) )
{
Tm6219DataBuff |= 0X80;
}
else
{
Tm6219DataBuff &= 0X7F;
}
Tm6219Cnt++;
O_CLK_PORT |= (1<<O_CLK_B);
// data load
Buff0 = Tm6219Cnt;
if( ( Buff0&0x7 ) == 0 )
{
Buff0 >>= 3;
Buff0 -= (Cnt_CRdata+1);
Buff0 &= 0x3;
Key[Buff0] = Tm6219DataBuff;
}
}
}
//--------------- display_pro / 显示 ---------------
void display_pro( void )
{
Tm6218Data[ Cnt_CWdata ] = Data_CWdata ;
Tm6218Data[ Cnt_CA ] = Data_CA ;
if( Fsys&Lamp ) Tm6218Data[ Cnt_CD ] = Data_CD_OFF ;
else Tm6218Data[ Cnt_CD ] = Data_CD ;
Tm6218Data[ Cnt_CRdata ] = Data_CRdata ;
// display data write to buff Tm6218Data[x]
}
//--------------- key_pro / 键输入 ---------------
void key_pro( void )
{
}
//--------------- time_base_pro / 时间基准 -----------------
void time_base_pro( void )
{
}
//--------------- output_pro / 输出 -----------------
void output_pro( void )
{
}
//--------------- sensor_pro / 传感器 -----------------
void sensor_pro( void )
{
}
//----- main_program / 主程序 -----
void main()
{
initial_pro();
while ( 1 )
{
option_reload_pro();
// timer_base: 0.512ms
if( FTimeBase )
{
FTimeBase = 0;
display_drive_pro();
TimeBase0 ++;
if( TimeBase0 == 0 )
TimeBase1 ++;
// loop_time_base: 2ms
switch( TimeBase0 & 0x3 )
{
case 0:
display_pro();
break;
case 1:
key_pro();
break;
case 2:
time_base_pro();
output_pro();
break;
case 3:
default:
sensor_pro();
break;
}
}
}
}
S3F9454'C for TM1629B driver.pdf 
Note:
1) 文中提及的名称和商标为相关所有者所有
2) SPM专用编程器


 /2
/2 





文章评论(0条评论)
登录后参与讨论