
Things are going apace with regard to my Arduino robot. Below we see a first-pass look at the robot base.
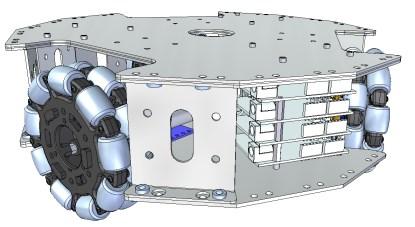
An early rendering of my proposed robot platform.
These drawings are being created by my chum Eugene "Willie" Richards, who hangs out in the next bay in my office building. Willie is a mechanical design expert who spends most of his time designing mechanical enclosures for the rugged transportable workstations from MaxVision.
Willie specialises in working with sheet metal, so he knows all sorts of useful nuggets of knowledge like the tensile strengths of different materials, how much material is required to accommodate bends, and all sorts of other stuff. He is also surrounded by catalogs of different huts, bolts, and fasteners of every shape and form, and he's not afraid to use them. Even better, Willie has access to all of the precision metal fabrication and machining tools at the closely affiliated MaxFab facility, which is located a stone's throw down the road from our offices.
In the case of my robot, Willie's mission is to create it in such a way as to minimise effort and expense while making it look ultra-cool. As part of this, the platform is to be created using just two types of elements—large (12-inch diameter) flat plates and vertical risers. In addition to separating the plates, the risers can also be used to hold a variety of sensors.
As you may recall, my robot is going to feature three omni-directional wheels. There will be three risers between each adjacent pair of wheels (only one riser is shown in the image above to facilitate our looking inside the structure). Also, the above image shows only one "slice of the cake," but Willie is designing the platform in such a way that I can add additional layers in the form of riser/plate combos.

Eugene "Willie" Richards in his lair.
I must admit that my original plan was just to throw in lots of mounting holes all over the place. If something came along that required additional holes, I was simply planning on drilling them in. When I voiced this plan to Willie, however, his eyebrows shot up in disbelief. Through clenched teeth he explained that this was not the way he designs things.
What Willie wants me to do is think ahead, as opposed to simply making things up as I meander my way through the morass. As part of this, Willie has requested information regarding the battery packs I intend to use to power the platform.
Ah. Hmmm. Sad to relate, I'm not really all that current with the various battery technologies, but Willie informs me that "I haven't got a clue" is not an acceptable answer.
I do know that I want these things to have a reasonably high current density and I want them to be rechargeable. My motors require 12V, while my various controllers and sensors require a range from 3.3V through 5V to 9V. I'm guessing that I will end up with two sets of batteries sharing a common ground—one for the motors and the other for the electronics.
In the case of my three Pololu 50:1 Gear Motors with Encoders, these each have a free-run current of 300mA at 12V, so I'm assuming I should be looking at batteries that can supply at least 1A. Ideally I would like to locate these batteries on the lowest level of the platform—the "engine room"—along with the motors. This would offer two advantages: (1) Keeping the centre of gravity as low as possible and (2) keeping the electronic sub-systems away from the (electrically) noisy motors. The downside to this is that this layer already contains the motors, which consume a substantial amount of space. One option might be to employ three smaller battery packs located in the dotted areas in the illustration below (note that this image is not Willie's fault—it's just something I threw together in Visio):
Can we squeeze the batteries into the dotted areas in the "engine room"?
Alternatively, I could locate the batteries on the layer above the motors, and then add yet another layer (or two) to accommodate the electronics sub-systems.
Lead-acid batteries tend to be a bit cumbersome. Lithium-ion batteries aren't as cheap as one might hope. Lithium-ion polymer (LiPo) batteries do look interesting. One option I've considered is to use the removable battery packs you find in power tools, but these tend to be rather expensive. And should I use the same batteries to power the electronics, or is it best to use a separate supply and—if so—what are the options?
The problem is that I'm new to this stuff. I could go off and research it, but this would take a lot of time and effort, and it would probably make my brain ache. All of which leads us to the purpose of this column, which is that I was rather hoping that any of you robot buffs out there might be moved to offer some useful advice (don't let the idiot [me] make a fool of himself). So... what say you?



 /4
/4 






用户3606471 2013-12-5 13:12
Hi! One set of batteries should do fine. The supply voltage should match your highest power need, like the 12 volts for the motors. Then, you could tap off of that bus, and use smaller, precision voltage regulators for the 3.3V controller and other v-reg's for the sensors, if they use a different voltage. If you look around, it is usually possible to replace a 5V sensor with one made by a different manufacturer, that also uses the same voltage as your processor at 3.3V. Your friend Willie is correct, advance planning will simplify many things.
Re- the Batteries... you might look into Lithium Iron Phosphate. They are about half the volume of Lead Acids and NiMH's for the same capacity, reasonably priced, practically immune to overcharging, and can come in a thin/flat (Prismatic) form factor. Tenergy has a nice selection. Good Luck with your project! --Tom