
在“无刷电机驱动的实际信号波形”给出的时序图中,没有“绕组电流和感应电压”项,前面的文章对该要点进行了讲解,不知道您是否理解了?接下来我们再来谈谈第二个要点——“脉冲状的施加电压”。
关于现象和波形等内容,请参阅“无刷电机驱动的实际信号波形”,请在了解了这些内容之后再阅读本文。
实际的电机驱动信号波形也有一些是在设计图(即时序图)中无法体现的。接下来将为您介绍其中无法通过此前的介绍内容理解的一些关键要点。
■无刷电机:脉冲状的施加电压
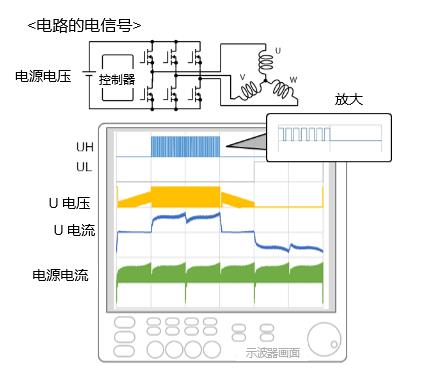
在用示波器观察电机的各种电信号时,控制功率晶体管ON/OFF的指令信号有可能是脉冲状的(下图中的栅极信号UH)。对于电机控制而言,这也是非常重要的一点。
在介绍指令信号变为脉冲信号的内容之前,我们先来稍微思考一下电机需要具备的功能。很多应用设备都是通过改变电机的转速和转矩来运行的。电风扇和空调风扇通过改变电机转速来调节风量,电车和电动汽车也是通过改变电机的速度和转矩来工作的。而对电机转速和转矩的控制则是通过调整所施加的电压大小实现的。例如,如果是一台使风扇旋转的电机,那么提高施加电压将会提高转速和转矩。基于这个道理,电机和电机控制需要具备调整所施加电压大小的功能。
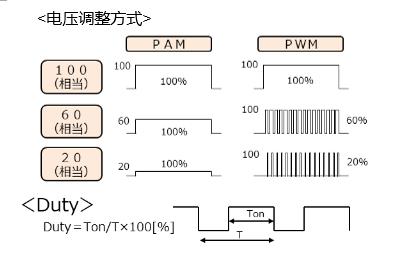
调整施加电压主要有两种方法。一种是改变电源电压。这是一种被称为“PAM(Pulse Amplitude Modulation,脉冲幅度调制)控制”的方法,可以改变所施加电压的大小(振幅、高低)。
另一种是通过将所施加的电压变为脉冲来改变平均值,这是一种被称为“PWM(Pulse Width Modulation,脉冲宽度调制)控制”的方法。这种PWM控制方法,通常通过在基准周期(下图中的T)中创建Hi和Lo期间,并调整它们之间的比率,来控制施加的平均电压。这个周期称为“PWM周期”,或者转换成表示频率的值,称为“PWM频率”。
PAM控制需要有调整电源电压的电路。PWM控制只要能充分利用其使功率晶体管ON/OFF的功能即可,近年来,采用PWM控制方法调整施加电压已经成为主流的做法。另外,利用这种控制,可以局部调整电压的大小,而不是像120度激励那样施加均匀电压,因此控制范围更大(例:正弦波激励)。
PWM控制方法中的电压调整率用Duty(占空比)表示。例如,当电源电压为100V、将施加电压调整为30V时,会使用“将Duty设为30%”这样的表述。
在第一张图中,示波器观察到的UH波形是脉冲状的,这表明这个控制IC(电机驱动器、控制器)采用的是PWM控制方式的120度激励。顺便提一下,Duty主要是从外部(比如应用设备的控制器等)输入的控制指令,因此电机驱动器会配备接收该指令的输入引脚。
“绕组引脚OFF期间的波形”是指各相高低边晶体管均关断期间绕组引脚表现出来的波形。这种状态称为“开路状态”、“OPEN状态”、“Hi-Z(高阻态、高阻抗)”等。在这里我们使用“开路”来表示。
在左图中虚线圈出的时间点,U相处于开路状态,V相电压处于施加PWM电压状态,W相处于恒定为Lo状态。此时,V相和W相的绕组引脚电压已经通过开关(晶体管)固定在电源电压或GND中,所以会呈现右图所示的波形。
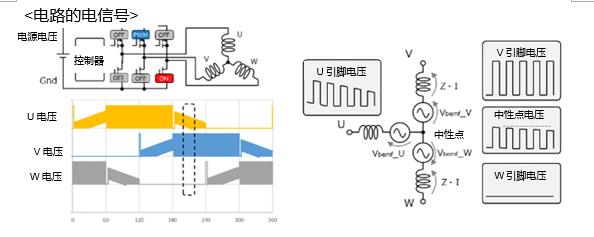
由于U相处于开路状态,因此出现了图中以中性点为基准的波形。中性点为V相引脚电压与W相引脚电压的分压值。V相和W相的Z・I(电压)值大致相同,但由于V相和W相的感应电压大小不同,因此如图所示,中性点电压呈现有梯度的脉冲状波形。另外,由于该中性点电压上还叠加了U相感应电压,因此U引脚电压呈现图中所示的波形。这是120度激励、高低边晶体管处于OFF状态(开路状态)的相的绕组引脚波形。
在电机控制中,这种“可以看到含有感应电压的波形的现象”很有使用价值。如上所述,OFF期间(开路状态)的绕组引脚电压呈现中性点电压与感应电压叠加后的波形,因此通过测量以中性点为基准的绕组引脚电压,即可测出该相的感应电压。
在前面的“无刷电机感应电压产生的原理”中,提到过感应电压是由线圈位置与转子(永磁体)的相对位置决定的。这意味着可以根据感应电压来推算转子的位置。
不使用霍尔器件等检测器件,而是利用该原理掌握转子位置的方法被称为“无传感器控制”,该方法已经得以广泛应用(如前所述,在电机控制中,转子位置的检测很重要)。顺便提一下,这种无传感器的传感装置是指霍尔器件等磁极检测器或编码器等转子位置检测器,需要配备用来检测感应电压的传感器。
另外,图中的波形还有一个需要注意的部分。从图中可以看出,出现感应电压的U相引脚电压波形并没有不受控地下降到一定值以下。下面介绍一下这种现象的原因。
在用示波器等设备确认绕组引脚电压时,如图中的波形所体现出来的,可以看到在略低于GND电压时,电压不再下降。先说结论,这是因为功率晶体管并联着被称为“续流二极管”的二极管(参见最下方的电路图)。
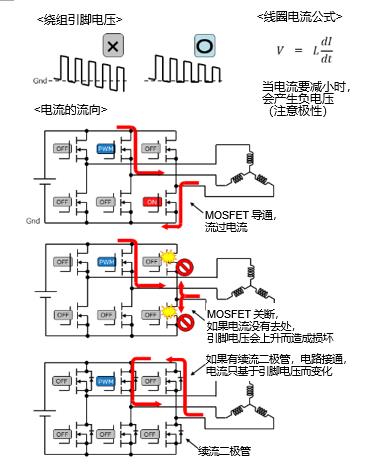
由于存在这个二极管,因此即使绕组引脚试图将电压降至低于“GND电位 - 二极管的正向电压(Vf)” ,因这个二极管导通而使电压不会降得更低。另外,基于同样的原因,该电压也不会超过“电源电压+Vf”。
顺便提一下,续流二极管的命名中并不像齐纳二极管或发光二极管那样含有某些特性,而是考虑到其续流作用而命名的名称(也许没有名为“续流二极管”的商品)。“续流二极管”也被称为“Freewheeling Diode”、“反激二极管”等。
这种二极管的作用是在关闭晶体管时保护电路中的元器件。上图中标出了使流动着电流的晶体管关闭时的电流流向。在电机的情况下,电流是流过线圈的,因此当通过关闭晶体管以停止电流流动时,线圈中会产生电压(参见图中的公式。这个公式意味着电流的变化会产生电压)。当这种电压很大时,可能会毁坏晶体管。
为了防止这种损坏,会与晶体管并联安装二极管。有了二极管,当被施加低于“Gnd-Vf”或高于“电源电压+Vf”的电压时,电流会流经二极管并被钳制(电压不会过高和过低),因此可以保护晶体管。
图中并没有体现出这种现象,不过在图中标有“PWM”的上方晶体管中也会出现这种现象。对于上方晶体管而言,其下方的二极管会成为电流路径并起到保护作用。
这种本应该开路的绕组引脚电压,因电流流过而“粘附(钳位状态)”到电源电压侧或GND侧的现象,在电机控制电路中经常出现。也有一些利用这种现象的控制方法,所以需要了解这种现象。
在某些情况下,可将其他二极管与各功率晶体管并联配置作为续流二极管使用。因结构上的特点,MOSFET内部有寄生二极管(体二极管),因此在其寄生二极管的特性足以起到续流作用的情况下,通常会直接使用MOSFET中的寄生二极管。所以图中所示的MOSFET不带续流二极管的电路本来是不存在的,为了便于解说,给出了没有续流二极管的电路图。
下面我们来谈谈“无刷电机驱动的实际信号波形”的第四个要点,也是最后一个项目——“电源电流”。
电源电流是在电机运行过程中应该确认的主要电信号。从字面看,电源电流的意思是流过电源的电流。前面已经讲过,在考虑电机的特性时,需要了解流过各相绕组的电流波形。而了解电源电流对于电机控制而言也是非常重要的。(注:这里所说的“电源电流”是指图中所示的从电源经由功率晶体管流入线圈再返回电源的电流。不包括控制IC和晶体管栅极驱动电流)我们先通过图片来具体了解一下电源电流。流过电源的电流会随着功率晶体管的ON/OFF状态而变化。下面对图中a~e的波形状态进行解说。
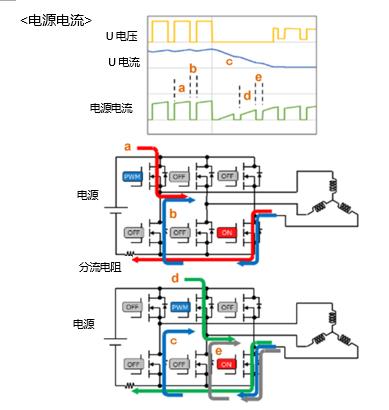
a:电流从U相上方晶体管流过绕组,从W相下方返回电源。因此,电源电流呈现与U相绕组电流相同的波形。
b:上方晶体管OFF,电流流过U相下方的续流二极管。此时,没有流向电源的电流。
c:当U相PWM区间结束后,流过U相的电流流经二极管的同时逐渐减小,最终变为零。此时的电流并不会出现在电源电流中。
d:这部分与a相同,电流从V相流向W相,并且出现流向电源的电流。
e:这部分与b相同。
如上所述,电源电流的波形随着功率晶体管的ON/OFF逻辑而变化,并呈脉冲状波形(无论流过的电流量是否与绕组电流相同)。
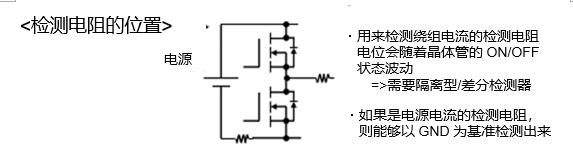
之所以需要了解电源电流,是因为电源电流中含有绕组电流信息,而电机控制中需要用到这些信息。在电机控制中,掌握绕组电流值很重要,但如果想直接检测绕组电流,则需要电流传感器或隔离放大器等特殊电路。相比之下,电源电流方式的优点是可以通过在下图所示位置配置电阻(称为“分流电阻”),并将一侧作为GND电位来检测其两端的电压。
检测值可用于:
・限制电流(控制电流,防止电流过大)
・各种控制(根据绕组电流值推算感应电压、检测电流相位等)
了解电源电流中所包含的信息,有助于更好地控制电机。
至此,我们通过一些篇幅介绍完了在设计图(时序图)中无法体现、通过本系列文章之前的介绍无法理解的、在实际的电机驱动信号波形中包含的五个要点。




 /4
/4 






文章评论(0条评论)
登录后参与讨论