
37款传感器与模块的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止37种的。鉴于本人手头积累了一些传感器和模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手试试做实验,不管成功与否,都会记录下来---小小的进步或是搞不定的问题,希望能够抛砖引玉。
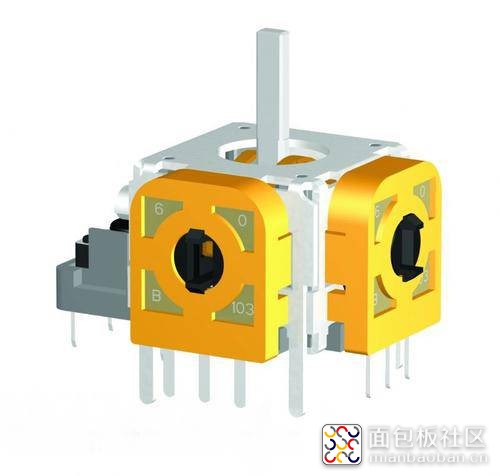
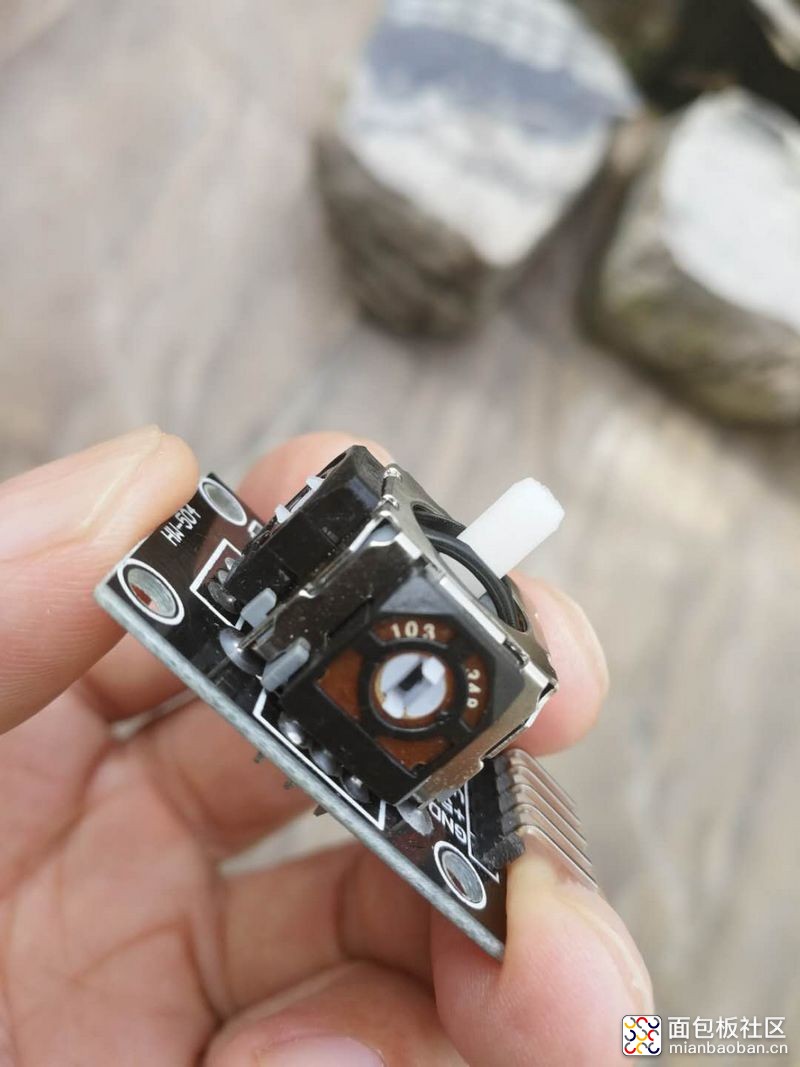
摇杆电位器
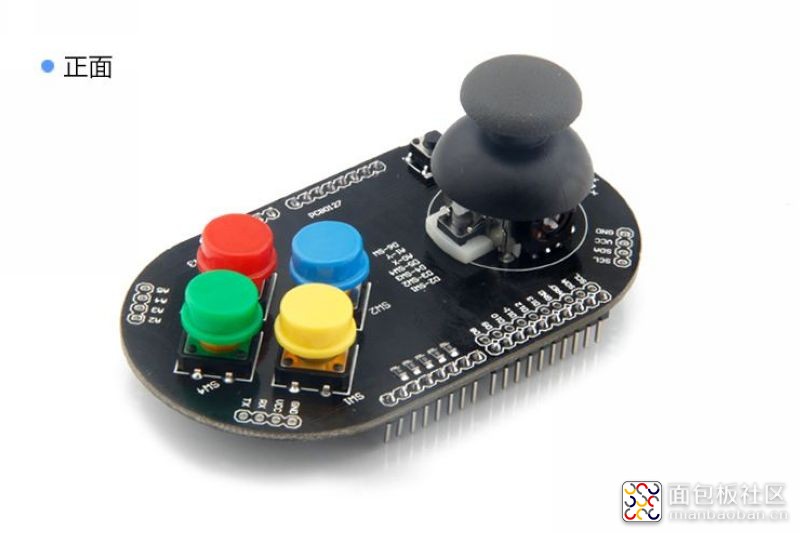
安装了两个10K高精度电位器和一个按键开关,功率0.015W,最高使用电压100V A.C,能垂直位置自动复位,用于控制键盘等, 可自由地控制方向,直观地监控机器的运转状况。

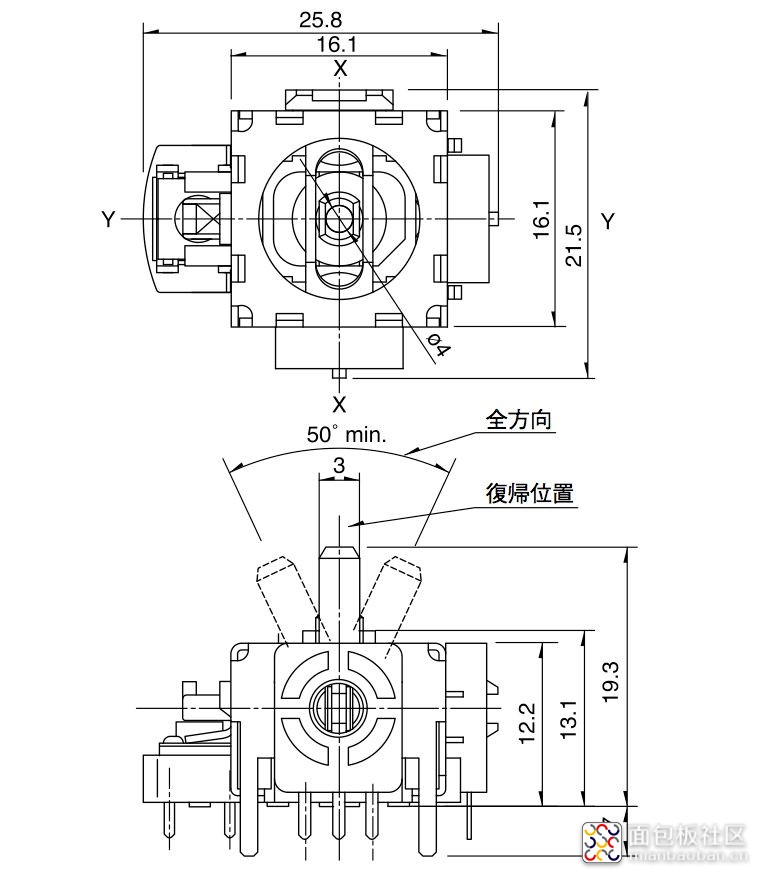
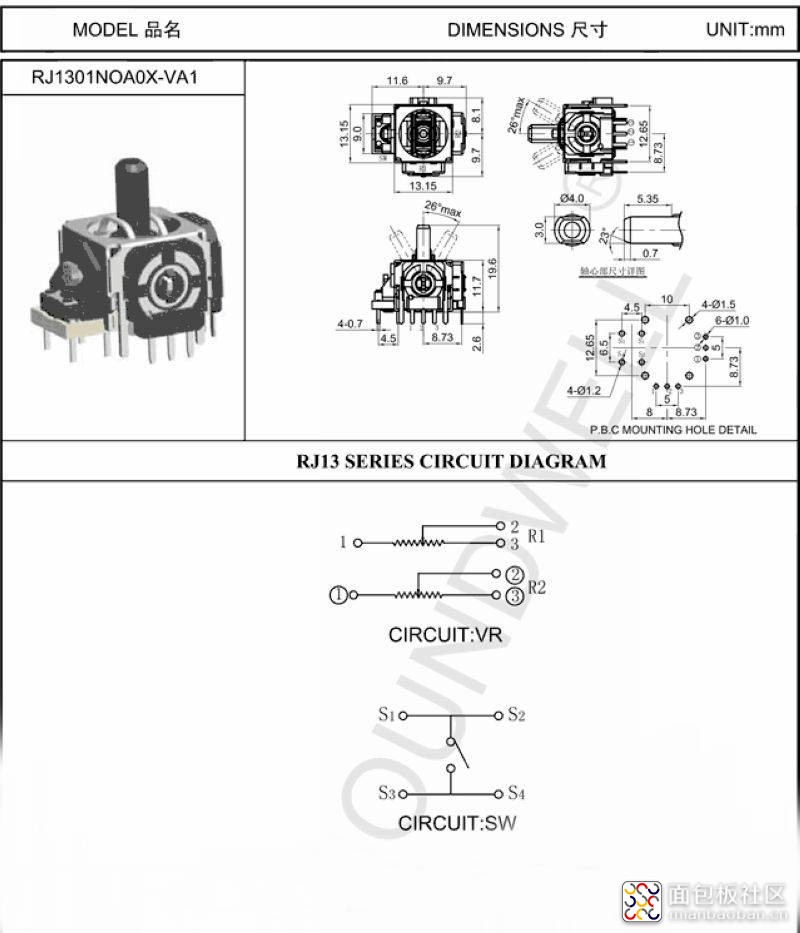
| 一、MECHANICAL CHARACTERISTIC 机械特性 1、Operating force of lever 摇杆作动力 :120±70 gf 2、Operating angle 操作角度:26° Max 二、ELECTRICAL CHARACTERISTIC 电气特性 1、Rating power 额定功率:0.0125W 2、Maximum operating voltage最高使用电压:AC 50V DC 5V 3、Voltage divider error 分压误差:44%~56% 4、Insulation resistance 绝缘阻抗:100M? 1 Minute at DC 250V 5、Dielectric voltage 耐电压:1 Minute at AC 250V 三、SWITCH CHARACTERISTICS 开关规格 1、Operating force 开关按压力:740±300gf 2、Contact resistance 接触阻抗:100mΩ Max 3、Rating power 额定功率:DC12V 50mA 四、ENDURANCE CHARACTERISTIC 耐久特性 1、Rotational life 旋转寿命:2000,000 cycles Min 2、Push operating life 开关按压寿命:1,000,000 cycles Min
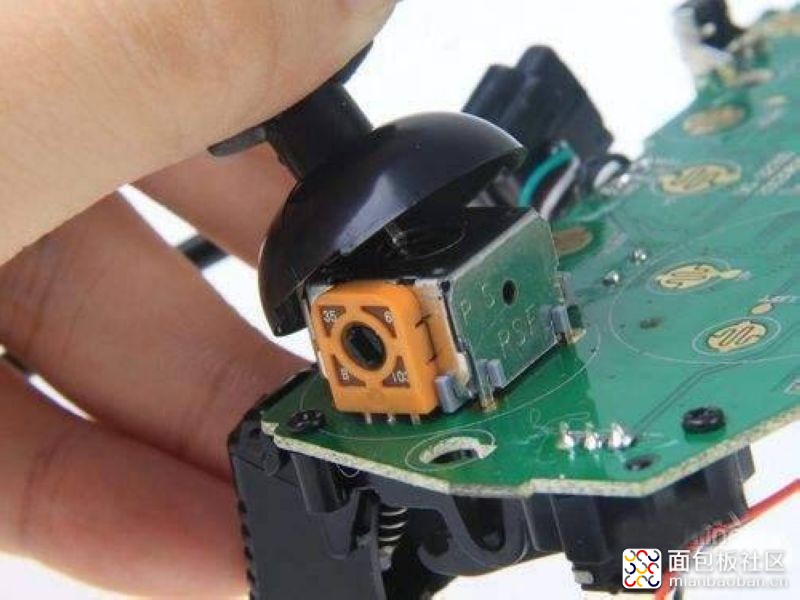
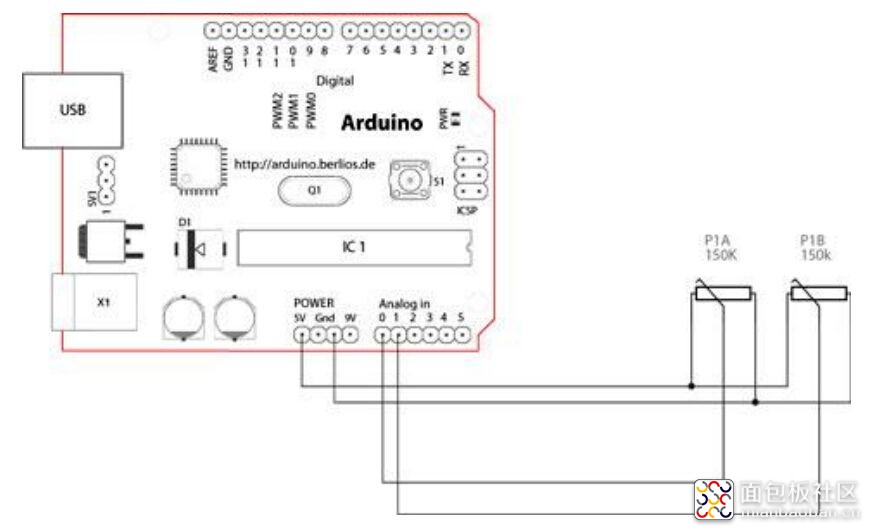
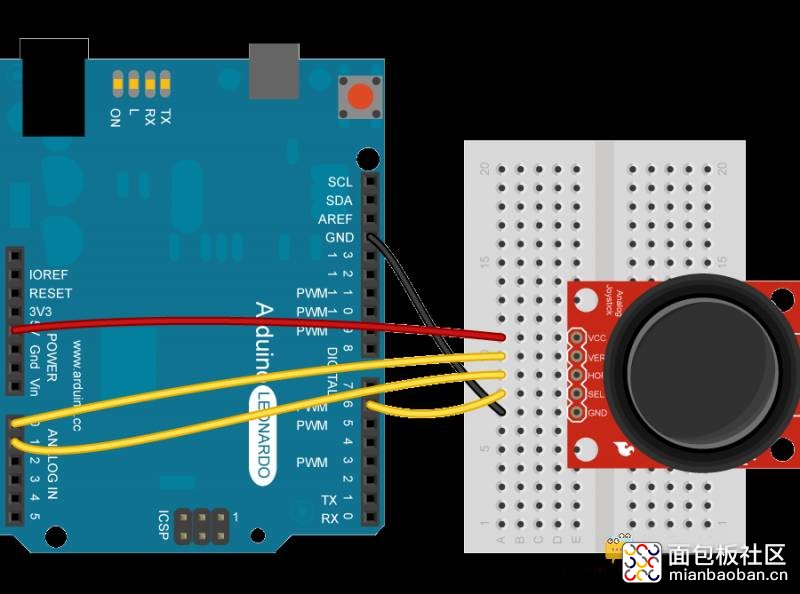
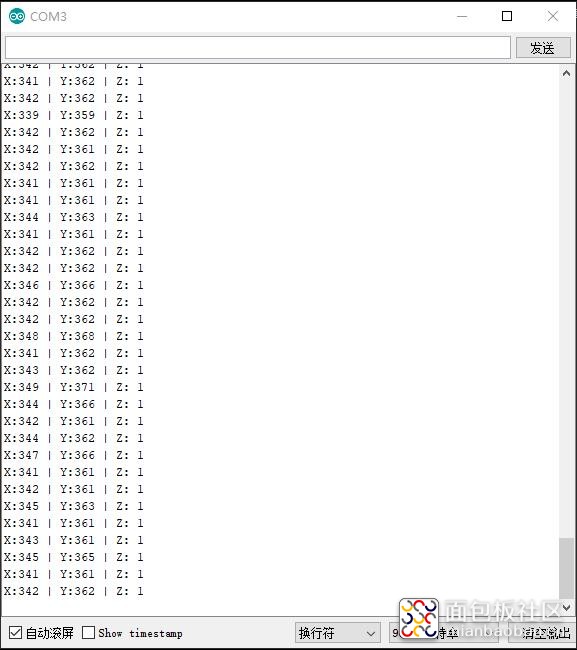
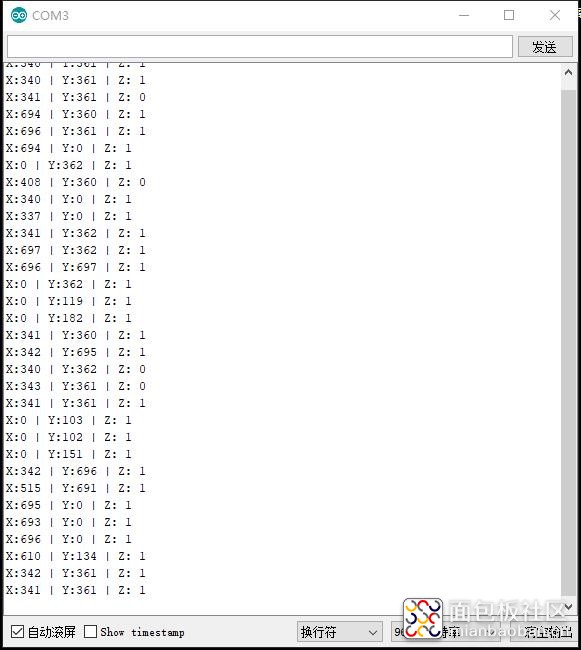
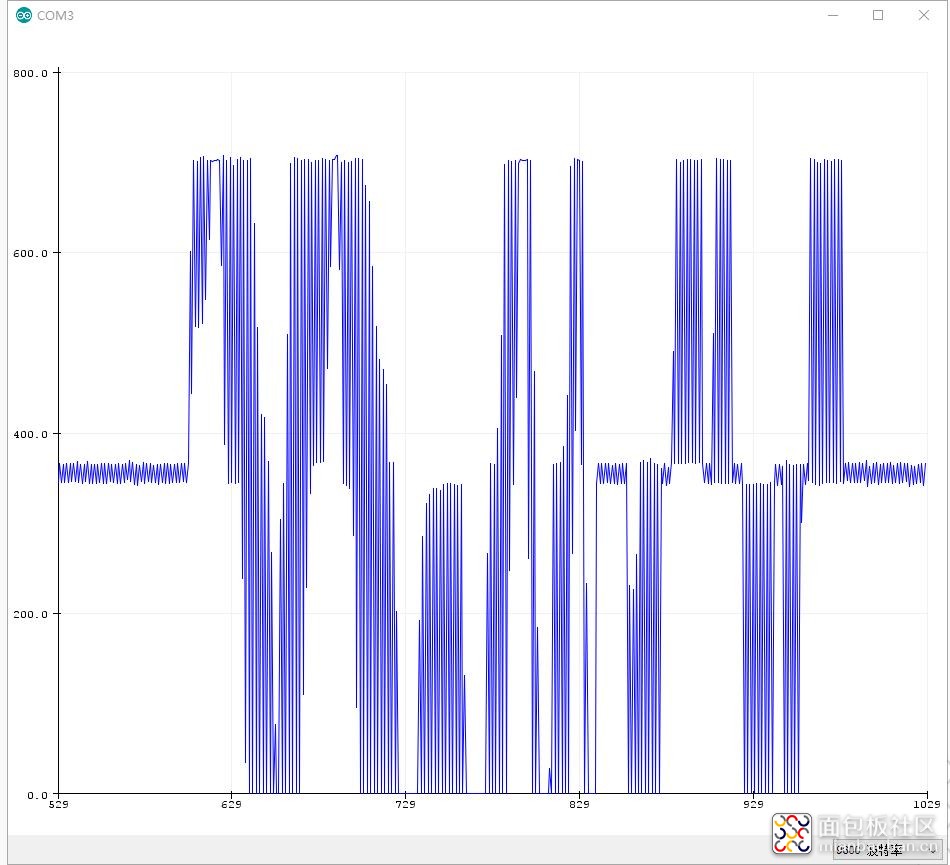
工作原理
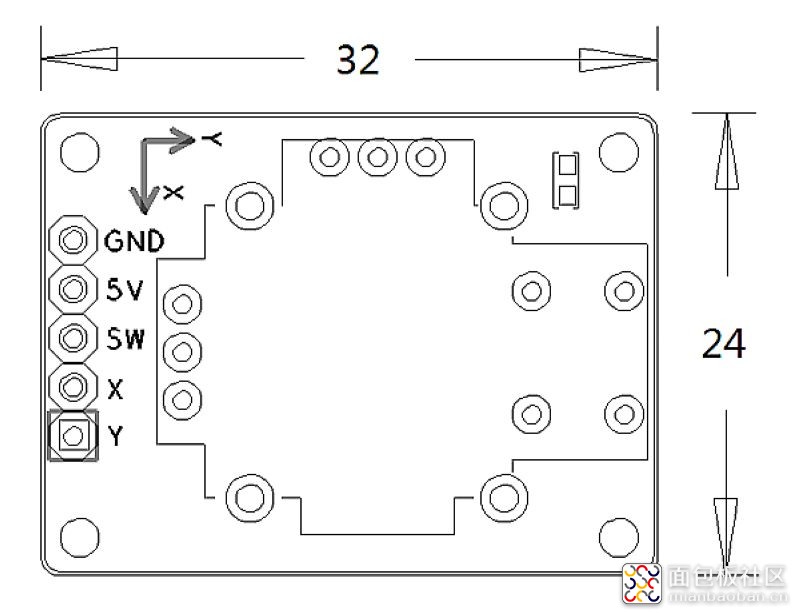
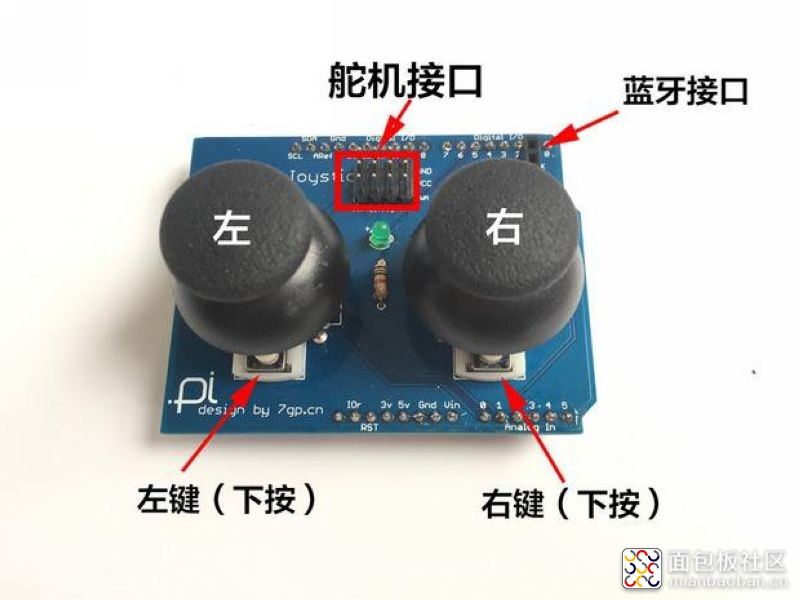
双轴XY按键摇杆模块
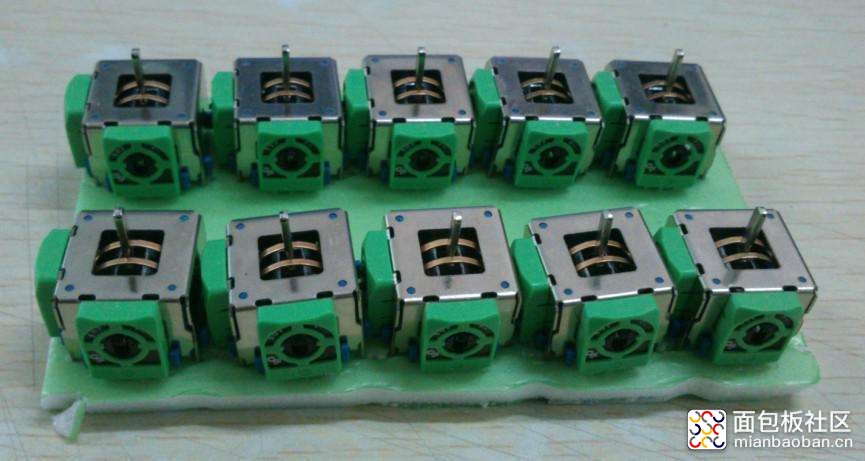
摇杆双联电位器实拍:通常是将两个规格相同的电位器装在同摇杆电位器结构一转轴上,调节转轴时,两个电位器的滑动触点异步转动。这个结构被称为同轴异步双联动的电位器。
作者: 雕爷学编程, 来源:面包板社区 链接: https://mbb.eet-china.com/blog/uid-me-3894459.html 版权声明:本文为博主原创,未经本人允许,禁止转载! 
EE直播间
更多

关闭
站长推荐
 /5 /5 
|














文章评论(0条评论)
登录后参与讨论