37款传感器与模块的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止37种的。鉴于本人手头积累了一些传感器和模块,依照实践(动手试试)出真知的理念,以学习和交流为目的,这里准备逐一做做实验,不管能否成功,都会记录下来---小小的进步或是搞不掂的问题,希望能够抛砖引玉。
【Arduino】168种传感器模块系列实验(资料+代码+图形+仿真)
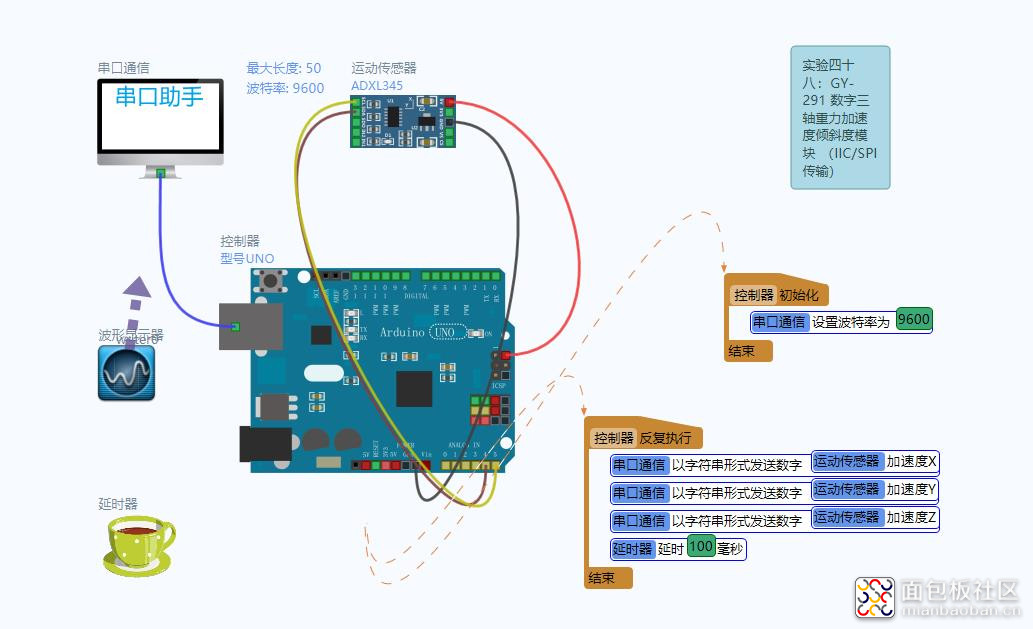
实验四十八:GY-291 数字三轴重力加速度倾斜度模块 (IIC/SPI传输)
ADXL345芯片
ADXL345是一款小而薄的低功耗3轴加速度计,分辨率高(13位),测量范围达±16g。数字输出数据为16位二进制补码格式,可通过SPI(3线或4线)或I2C数字接口访问。ADXL345非常适合移动设备应用。它可以在倾斜检测应用中测量静态重力加速度,还可以测量运动或冲击导致的动态加速度。其高分辨率(4 mg/LSB),能够测量不到1.0°的倾斜角度变化。该器件提供多种特殊检测功能。活动和非活动检测功能检测有无运动发生,以及任意轴上的加速度是否超过用户设置的限值。敲击检测功能可以检测单击和双击动作。自由落体检测功能可以检测器件是否正在掉落。这些功能可以映射到两个中断输出引脚中的一个。正在申请专利的32级先进先出(FIFO)缓冲器可用于存储数据,最大程度地减少主机处理器的干预。低功耗模式支持基于运动的智能电源管理,从而以极低的功耗进行阈值感测和运动加速度测量。
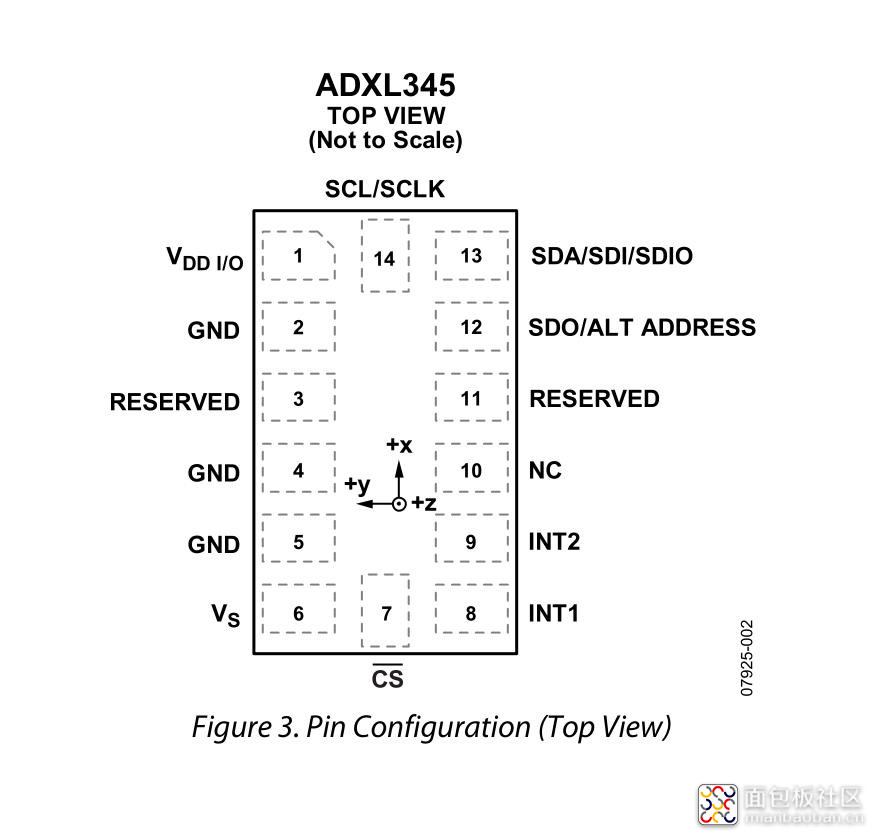
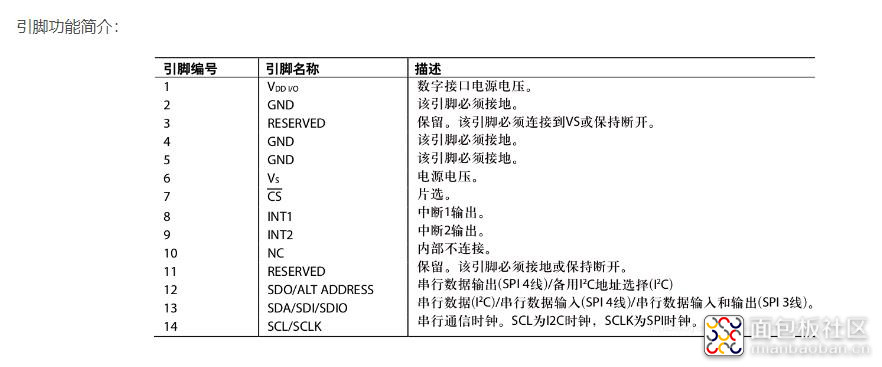
ADXL345采用3 mm × 5 mm × 1 mm、14引脚小型超薄塑料封装。

主要特性
超低功耗:V S = 2.5 V 时(典型值),测量模式下低至23ì A ,
待机模式下为0.1μA
功耗随带宽自动按比例变化
用户可选的分辨率
10 位固定分辨率
全分辨率,分辨率随g范围提高而提高,± 16g 时高达13 位
(在所有g范围内保持4 mg/L S B 的比例系数)
正在申请专利的嵌入式存储器管理系统采用FI FO 技术,可将
主机处理器负荷降至最低
单振/双振检测
活动/非活动监控
自由落体检测
电源电压范围:2.0 V 至3.6 V
I / O电压范围:1.7 V 至V S
S PI (3线和4线)和I 2 C数字接口
灵活的中断模式,可映射到任一中断引脚
通过串行命令可选测量范围
通过串行命令可选带宽
宽温度范围(- 40° C 至+ 85 ℃)
抗冲击能力:10, 000 g
无铅/符合Ro HS标准

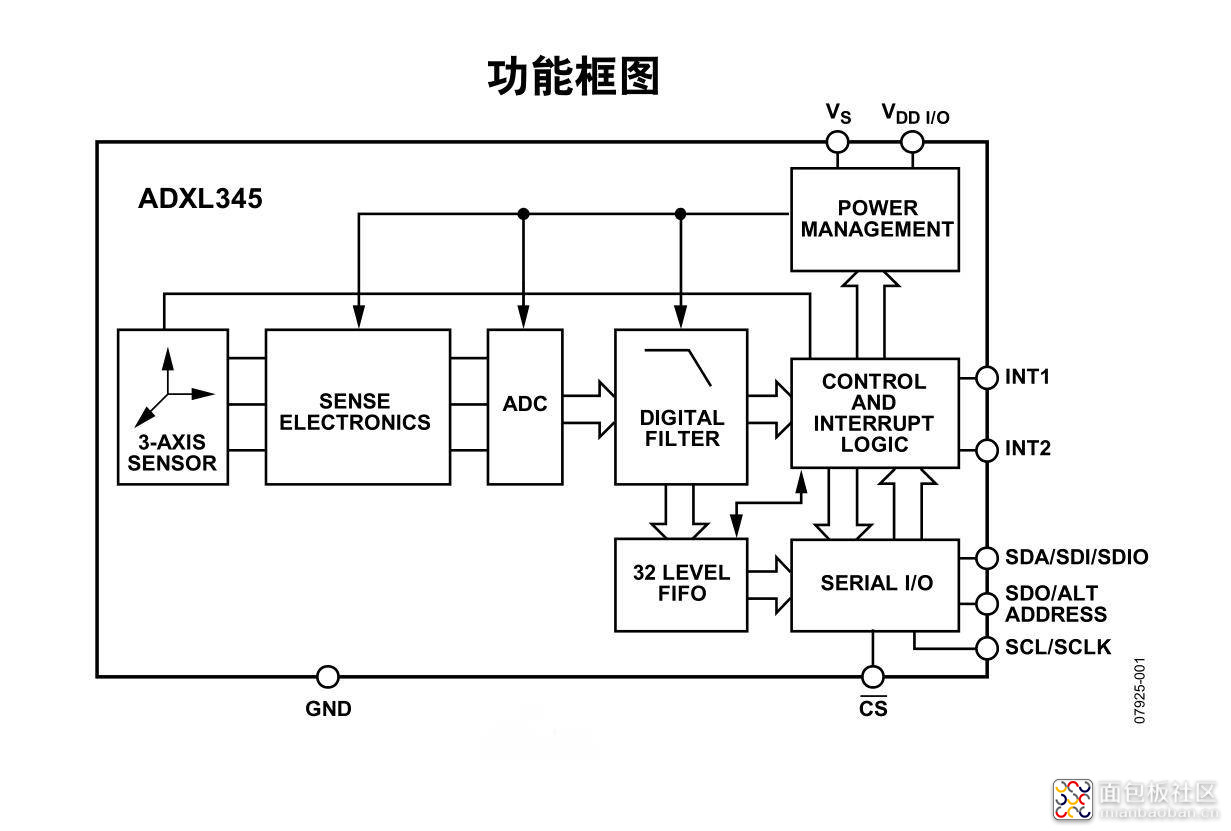
工作原理
ADXL345是一款完整的3轴加速度测量系统,可选择的测量范围有±2 g,±4 g,±8 g或±16 g。既能测量运动或冲击导致的动态加速度,也能测量静止加速度,例如重力加速度,使得器件可作为倾斜传感器使用。该传感器为多晶硅表面微加工结构,置于晶圆顶部。由于应用加速度,多晶硅弹簧悬挂于晶圆表面的结构之上,提供力量阻力。差分电容由独立固定板和活动质量连接板组成,能对结构偏转进行测量。加速度使惯性质量偏转、差分电容失衡,从而传感器输出的幅度与加速度成正比。相敏解调用于确定加速度的幅度和极性。

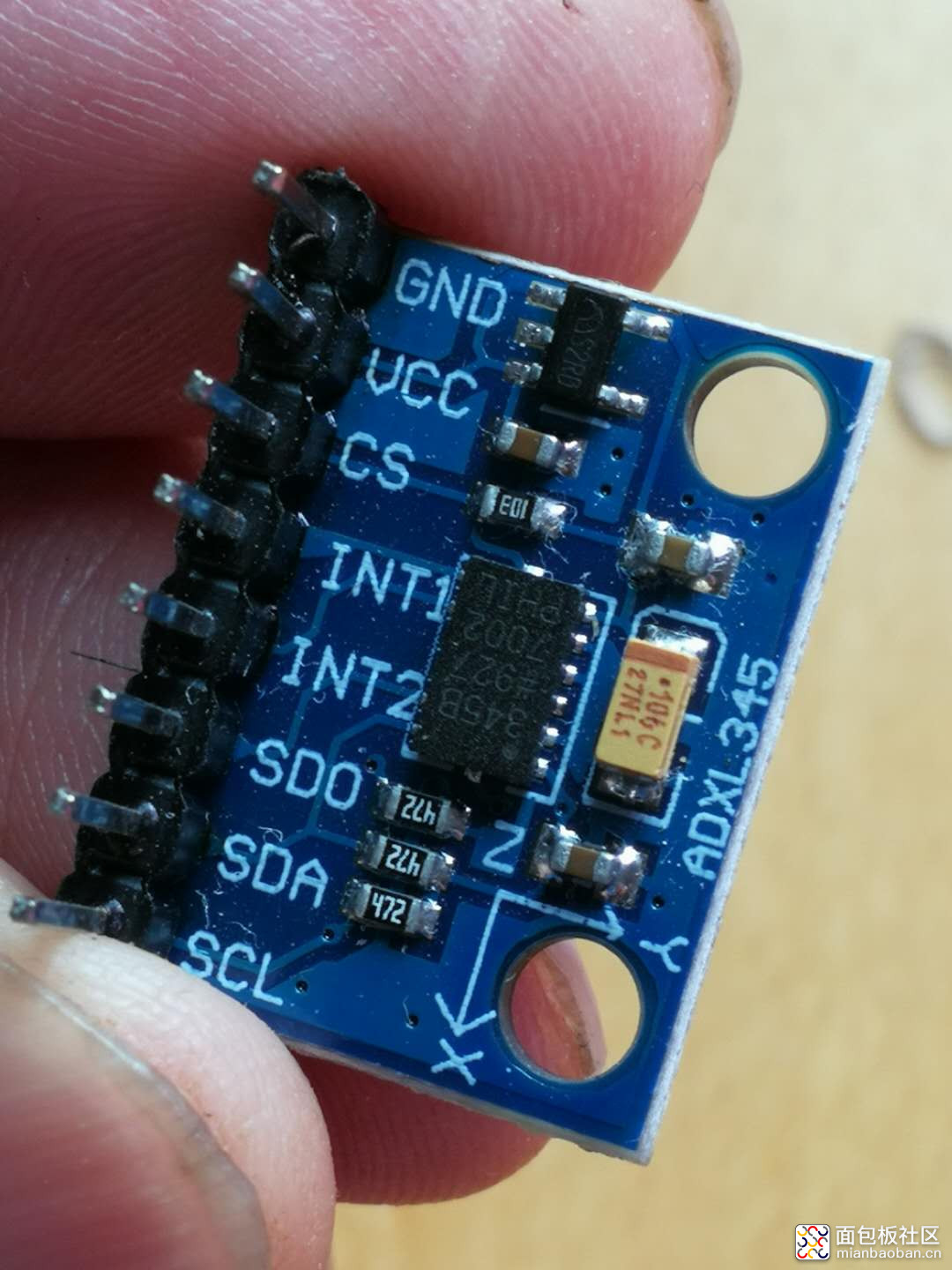
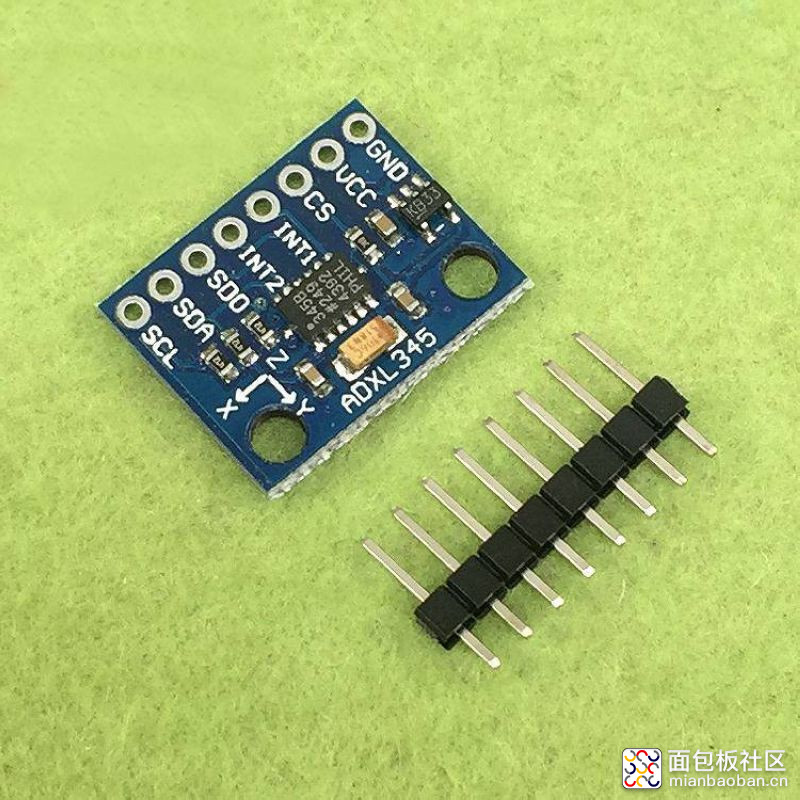
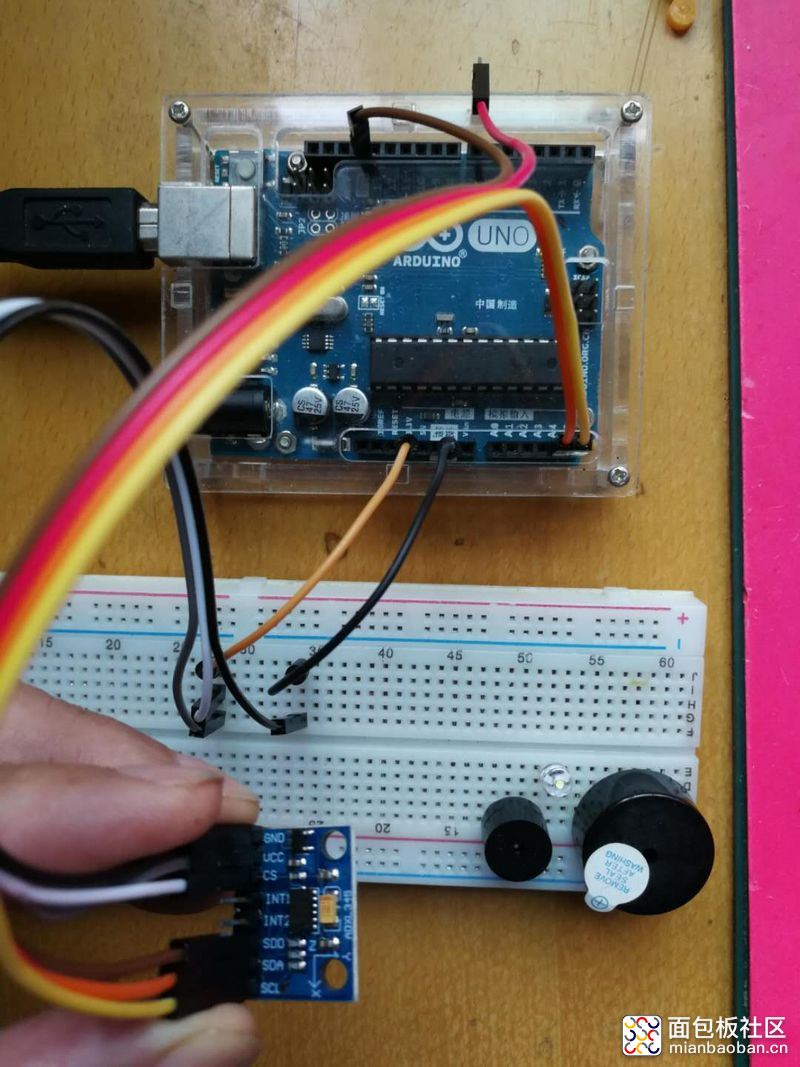
ADXL345三轴加速度模块
采用ADXL345芯片,具有体积小,功耗低的特点,13位数字精度分辨能够测量超过±16g的加速度变换。信号输出为16位数字输出,可以通过SPI与I2C接口实现信号采集。ADXL345适用于倾斜角度测量,能够进行静态重力加速度检测。同时也适用于运动状态的追踪,测量运动或冲击过程造成的瞬时加速度。其高分辨率(4mg/LSB)使之能够感应变化小于1°的倾斜角度。ADXL345三轴加速度计还内置一款LDO模块让你的加速度计能够工作于3.3~6v的工作电压之下。同时传感器提供了几个特殊的功能。能够在静态或动态情况下检测是否有运动或停止出现,另外能够感知单轴的加速度值是否超出用户的设定值。检测单击/双击。如果该设备正在下降,能进行自由落体感应检测。这些功能能够被映射到两个中断输出引脚上。在低功耗模式是用户能够基于ADXL345动作感应,进行电源管理,同时只损耗极低的功耗。

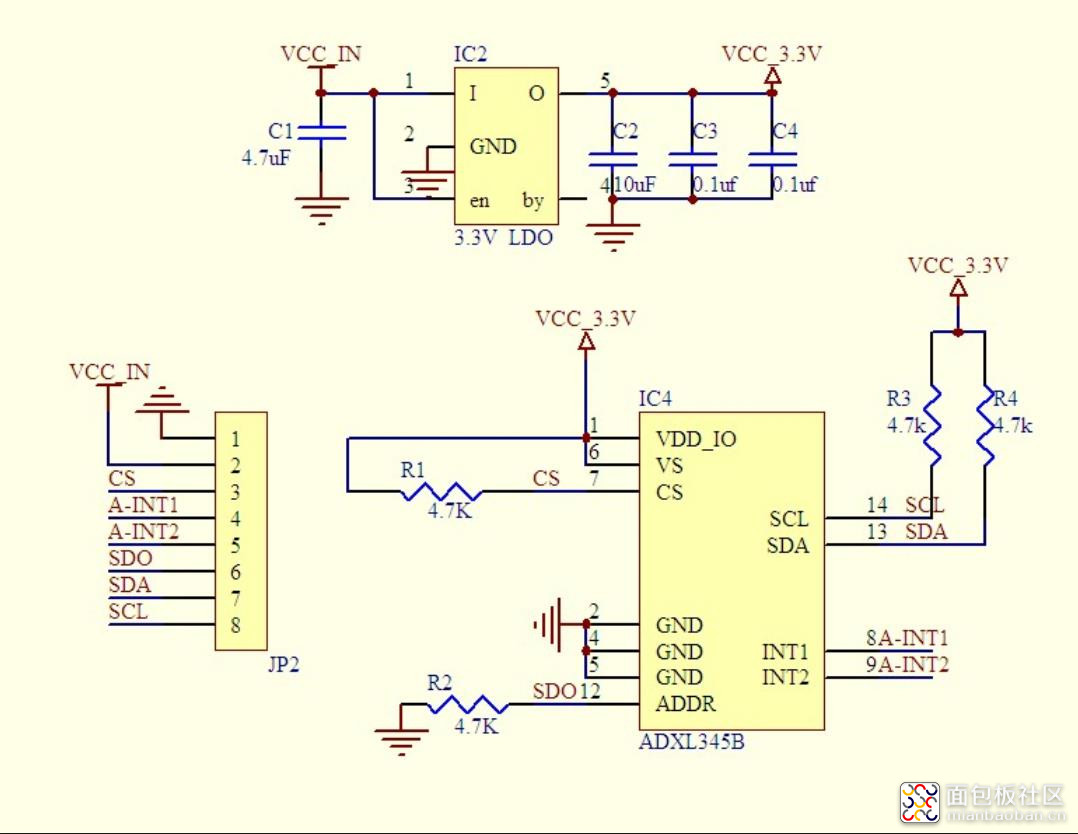
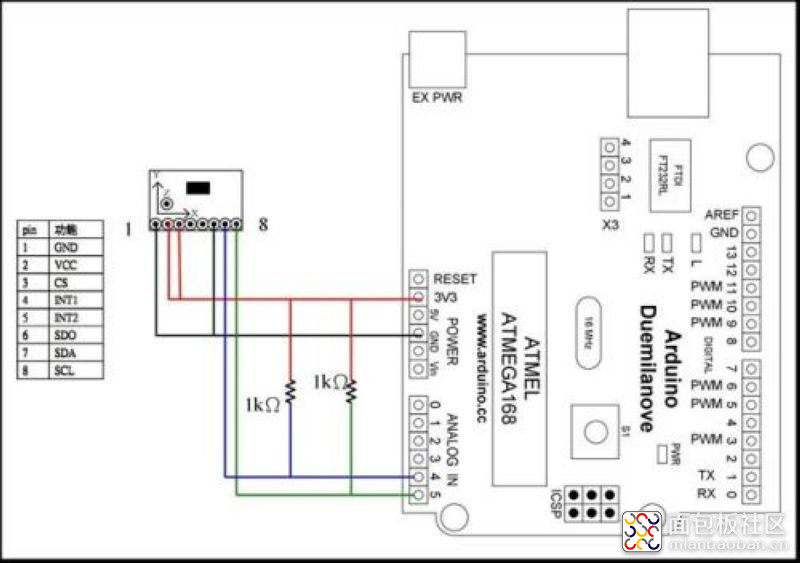
模块的电原理图
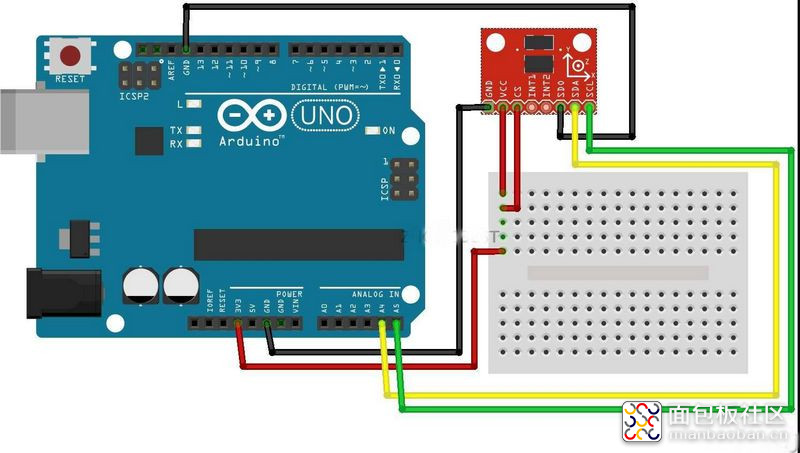
/*
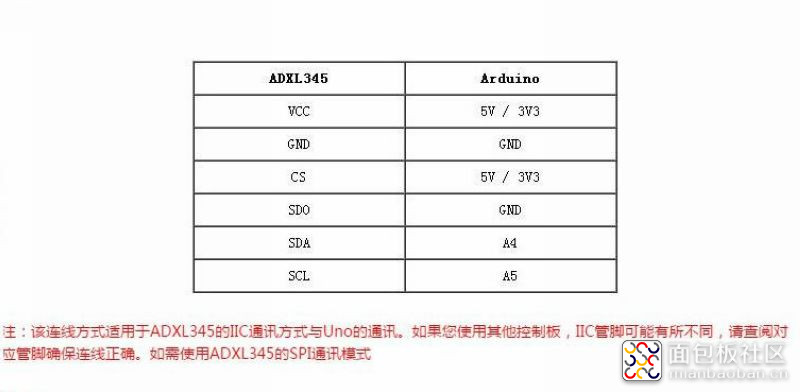
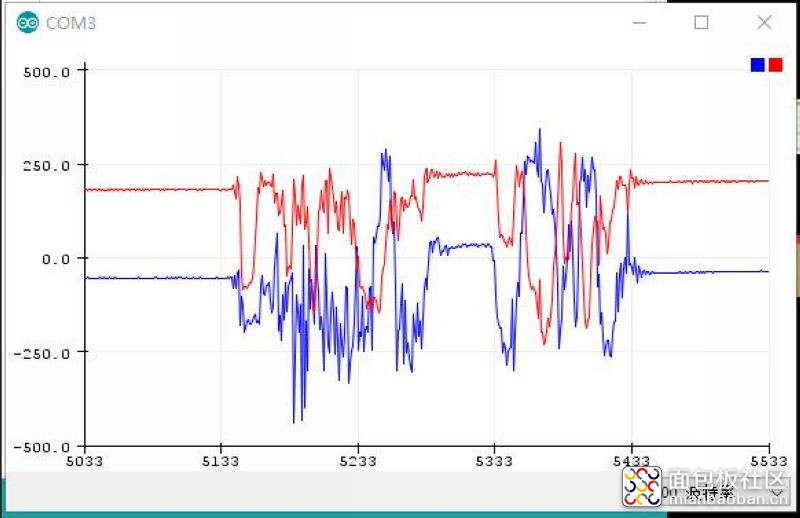
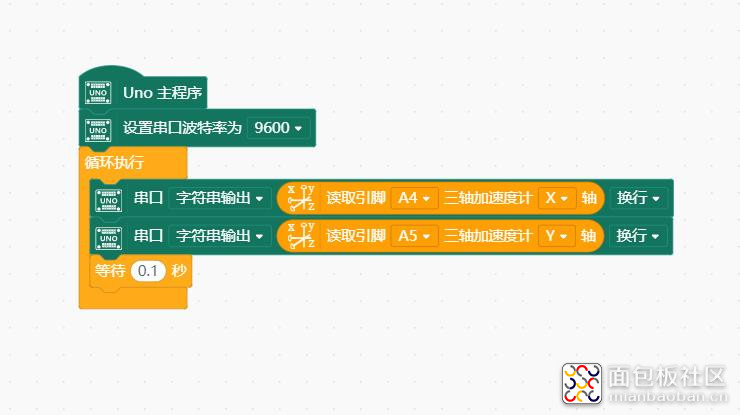
【Arduino】168种传感器模块系列实验(48)实验四十八:GY-291 数字三轴重力加速度倾斜度模块 (IIC/SPI传输)简单实验,之一*/ void setup() { Serial.begin(9600); pinMode(A4, INPUT); pinMode(A5, INPUT); } void loop() { Serial.println(analogRead(A4)); Serial.println(analogRead(A5)); delay(100);}复制代码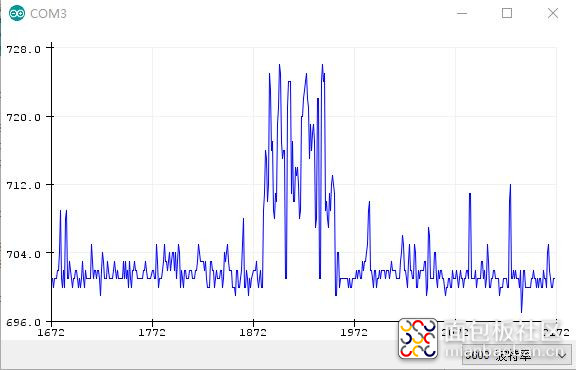
/*
【Arduino】168种传感器模块系列实验(48)实验四十八:GY-291 数字三轴重力加速度倾斜度模块 (IIC/SPI传输)实验代码之二*/ #include <Wire.h> #define DEVICE (0x53) #define TO_READ (6) byte buff[TO_READ] ; char str[512]; int regAddress = 0x32; int x, y, z; double roll = 0.00, pitch = 0.00; void setup() { Wire.begin(); Serial.begin(9600); writeTo(DEVICE, 0x2D, 0); writeTo(DEVICE, 0x2D, 16); writeTo(DEVICE, 0x2D, 8);} void loop() { readFrom(DEVICE, regAddress, TO_READ, buff); x = (((int)buff[1]) << 8) | buff[0]; y = (((int)buff[3])<< 8) | buff[2]; z = (((int)buff[5]) << 8) | buff[4]; //we send the x y z values as a string to the serial port Serial.print("The acceleration info of x, y, z are:"); sprintf(str, "%d %d %d", x, y, z); Serial.print(str); Serial.write(10); RP_calculate(); Serial.print("Roll:"); Serial.println( roll ); Serial.print("Pitch:"); Serial.println( pitch ); Serial.println(""); delay(300);} void writeTo(int device, byte address, byte val) { Wire.beginTransmission(device); Wire.write(address); Wire.write(val); Wire.endTransmission(); } void readFrom(int device, byte address, int num, byte buff[]) { Wire.beginTransmission(device); Wire.write(address); Wire.endTransmission(); Wire.beginTransmission(device); Wire.requestFrom(device, num); int i = 0; while(Wire.available()) { buff = Wire.read(); i++; } Wire.endTransmission();} void RP_calculate(){ double x_Buff = float(x); double y_Buff = float(y); double z_Buff = float(z); roll = atan2(y_Buff , z_Buff) * 57.3; pitch = atan2((- x_Buff) , sqrt(y_Buff * y_Buff + z_Buff * z_Buff)) * 57.3;}复制代码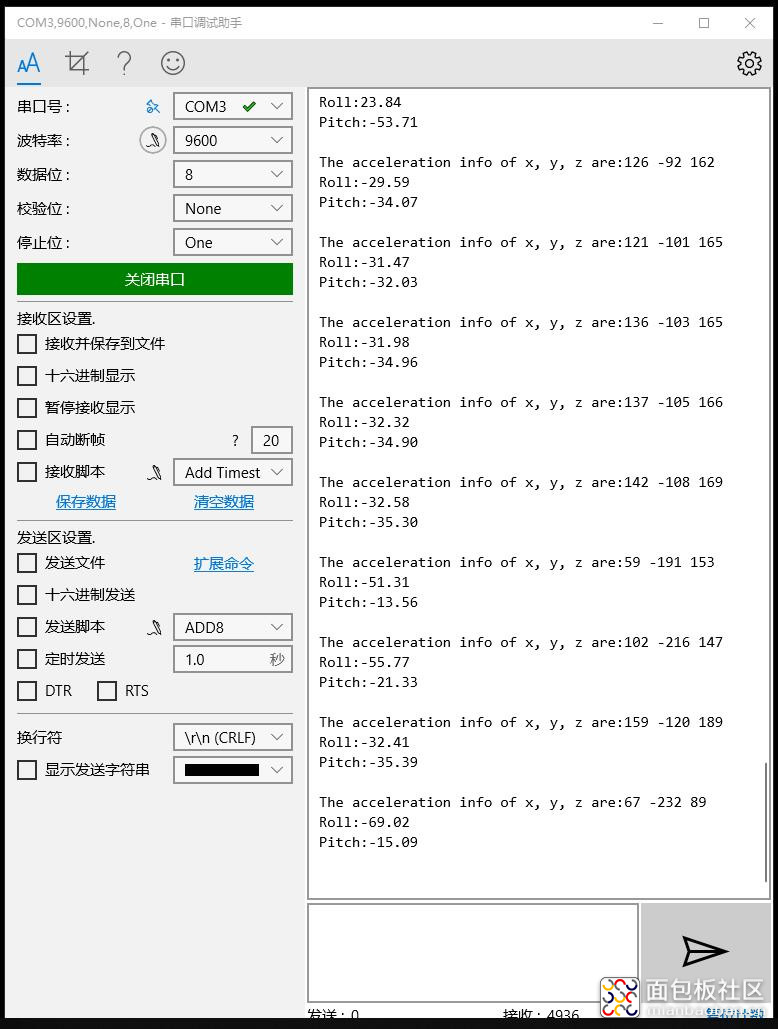

/*
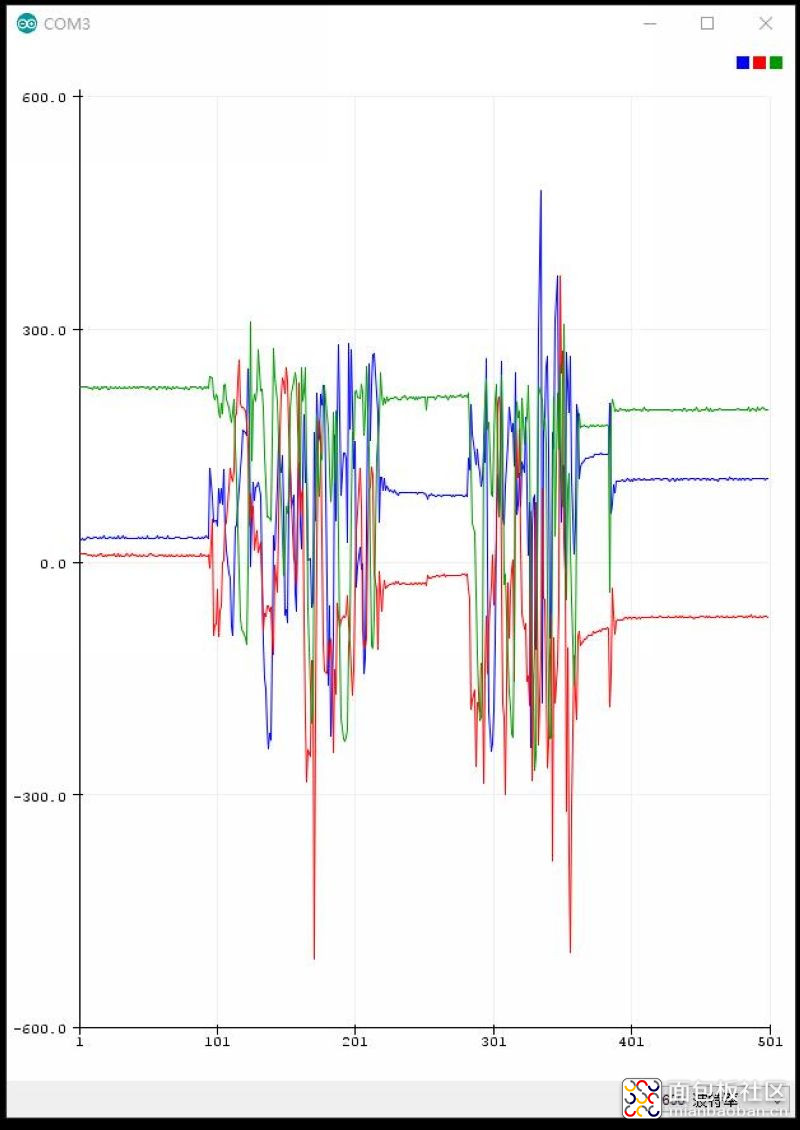
【Arduino】168种传感器模块系列实验(48)实验四十八:GY-291 数字三轴重力加速度倾斜度模块 (IIC/SPI传输)实验代码之三*/ #include <Wire.h>#define Register_ID 0 #define Register_2D 0x2D #define Register_X0 0x32 #define Register_X1 0x33 #define Register_Y0 0x34 #define Register_Y1 0x35 #define Register_Z0 0x36#define Register_Z1 0x37 int ADXAddress = 0xA7 >> 1;int reading = 0; int val=0;int X0,X1,X_out;int Y0,Y1,Y_out;int Z1,Z0,Z_out;double Xg,Yg,Zg; void setup(){ Wire.begin(); Serial.begin(9600); delay(100); Wire.beginTransmission(ADXAddress); Wire.write(Register_2D); Wire.write(8); Wire.endTransmission(); } void loop(){ Wire.beginTransmission(ADXAddress); Wire.write(Register_X0); Wire.write(Register_X1); Wire.endTransmission(); Wire.requestFrom(ADXAddress,2); if(Wire.available()<=2) { X0 = Wire.read(); X1 = Wire.read(); X1=X1<<8; X_out=X0+X1; } Wire.beginTransmission(ADXAddress); Wire.write(Register_Y0); Wire.write(Register_Y1); Wire.endTransmission(); Wire.requestFrom(ADXAddress,2); if(Wire.available()<=2) { Y0 = Wire.read(); Y1 = Wire.read(); Y1=Y1<<8; Y_out=Y0+Y1; } Wire.beginTransmission(ADXAddress); Wire.write(Register_Z0); Wire.write(Register_Z1); Wire.endTransmission(); Wire.requestFrom(ADXAddress,2); if(Wire.available()<=2) { Z0 = Wire.read(); Z1 = Wire.read(); Z1=Z1<<8; Z_out=Z0+Z1; } Xg=X_out; Yg=Y_out; Zg=Z_out; Serial.print("X= "); Serial.print(Xg); Serial.print(" "); Serial.print("Y= "); Serial.print(Yg); Serial.print(" "); Serial.print("Z= "); Serial.print(Zg); Serial.println(" "); delay(200);}复制代码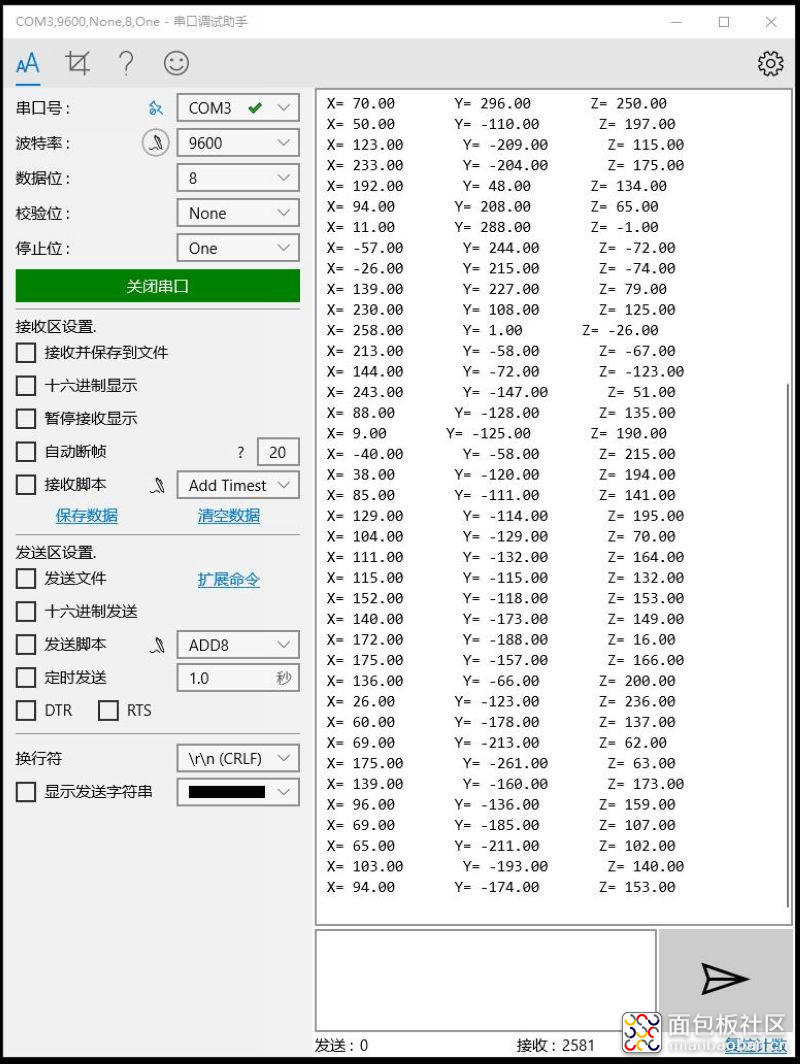



 /5
/5 




雕爷学编程 2020-3-4 07:52
lyyinhe_xi 2020-1-26 21:20
curton 2019-12-20 21:29