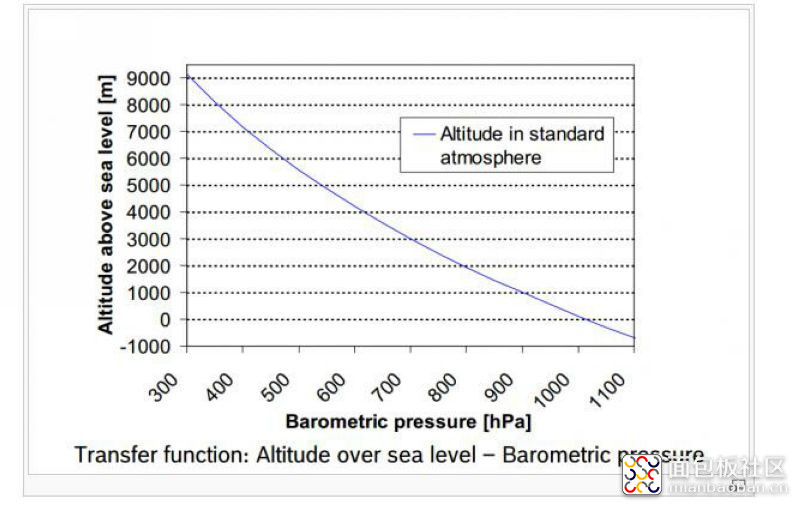
特性曲线
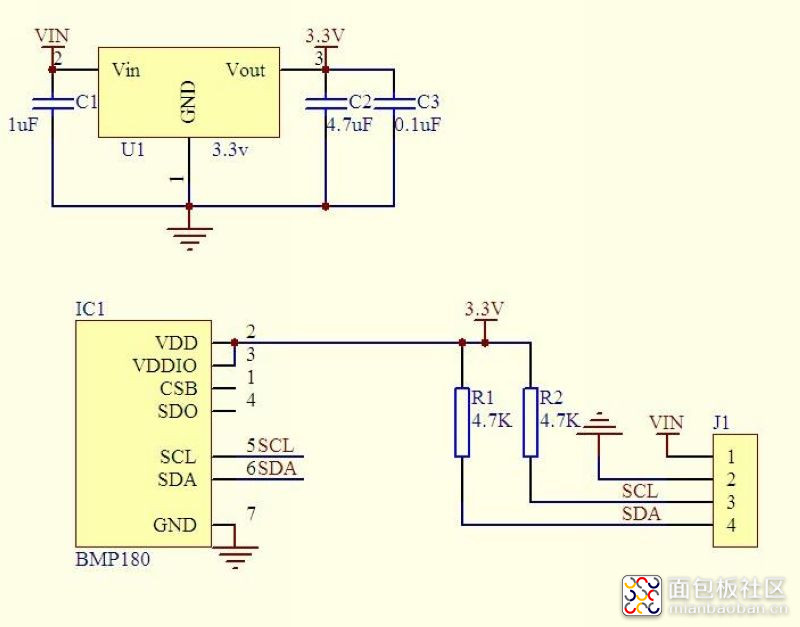
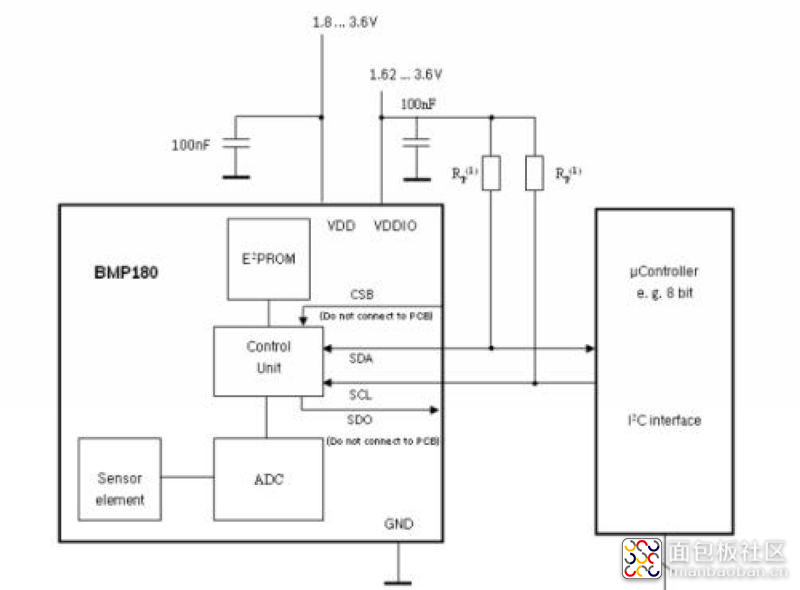
模块电原理图
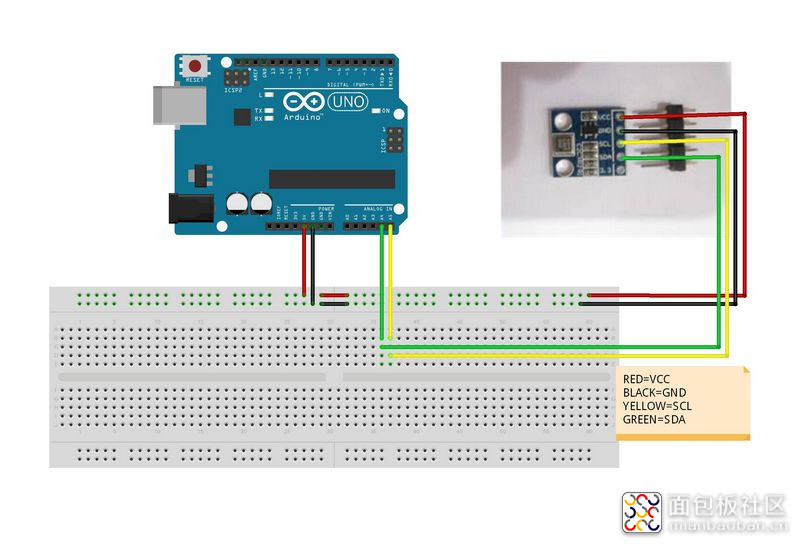
需要用的 “SFE_BMP180” 库文件如下 SFE_BMP180.h /* 【Arduino】66种传感器模块系列实验(68)实验六十八:BMP180 新款 BOSCH温度模块气压传感器(代替BMP085)SFE_BMP180.h*/#ifndef SFE_BMP180_h#define SFE_BMP180_h#if defined(ARDUINO) && ARDUINO >= 100#include "Arduino.h"#else#include "WProgram.h"#endifclass SFE_BMP180{ public: SFE_BMP180(); char begin(); shorted?) char startTemperature(void); char getTemperature(double &T); startTemperature command char startPressure(char oversampling); char getPressure(double &P, double &T); startPressure command double sealevel(double P, double A); weather data) double altitude(double P, double P0); sea-level, runway, etc.) char getError(void); private: char readInt(char address, int16_t &value); char readUInt(char address, uint16_t &value); char readBytes(unsigned char *values, char length); char writeBytes(unsigned char *values, char length); subsequent registers) int16_t AC1,AC2,AC3,VB1,VB2,MB,MC,MD; uint16_t AC4,AC5,AC6; double c5,c6,mc,md,x0,x1,x2,y0,y1,y2,p0,p1,p2; char _error;};#define BMP180_ADDR 0x77 #define BMP180_REG_CONTROL 0xF4#define BMP180_REG_RESULT 0xF6#define BMP180_COMMAND_TEMPERATURE 0x2E#define BMP180_COMMAND_PRESSURE0 0x34#define BMP180_COMMAND_PRESSURE1 0x74#define BMP180_COMMAND_PRESSURE2 0xB4#define BMP180_COMMAND_PRESSURE3 0xF4复制代码SFE_BMP180.cp /* 【Arduino】66种传感器模块系列实验(68)实验六十八:BMP180 新款 BOSCH温度模块气压传感器(代替BMP085)SFE_BMP180.cp*/#include <SFE_BMP180.h>#include <Wire.h>#include <stdio.h>#include <math.h>SFE_BMP180::SFE_BMP180(){}char SFE_BMP180::begin(){ double c3,c4,b1; Wire.begin(); if (readInt(0xAA,AC1) && readInt(0xAC,AC2) && readInt(0xAE,AC3) && readUInt(0xB0,AC4) && readUInt(0xB2,AC5) && readUInt(0xB4,AC6) && readInt(0xB6,VB1) && readInt(0xB8,VB2) && readInt(0xBA,MB) && readInt(0xBC,MC) && readInt(0xBE,MD)) {AC6 = 23153;Calcs.pdf25671; AC6 = 18974; c3 = 160.0 * pow(2,-15) * AC3; c4 = pow(10,-3) * pow(2,-15) * AC4; b1 = pow(160,2) * pow(2,-30) * VB1; c5 = (pow(2,-15) / 160) * AC5; c6 = AC6; mc = (pow(2,11) / pow(160,2)) * MC; md = MD / 160.0; x0 = AC1; x1 = 160.0 * pow(2,-13) * AC2; x2 = pow(160,2) * pow(2,-25) * VB2; y0 = c4 * pow(2,15); y1 = c4 * c3; y2 = c4 * b1; p0 = (3791.0 - 8.0) / 1600.0; p1 = 1.0 - 7357.0 * pow(2,-20); p2 = 3038.0 * 100.0 * pow(2,-36); return(1); } else { return(0); }}char SFE_BMP180::readInt(char address, int16_t &value){ unsigned char data[2]; data[0] = address; if (readBytes(data,2)) { value = (int16_t)((data[0]<<8)|data[1]);negative return(1); } value = 0; return(0);}char SFE_BMP180::readUInt(char address, uint16_t &value){ unsigned char data[2]; data[0] = address; if (readBytes(data,2)) { value = (((uint16_t)data[0]<<8)|(uint16_t)data[1]); return(1); } value = 0; return(0);}char SFE_BMP180::readBytes(unsigned char *values, char length){ char x; Wire.beginTransmission(BMP180_ADDR); Wire.write(values[0]); _error = Wire.endTransmission(); if (_error == 0) { Wire.requestFrom(BMP180_ADDR,length);while(Wire.available() != length) ; for(x=0;x<length;x++) { values[x] = Wire.read(); } return(1); } return(0);}char SFE_BMP180::writeBytes(unsigned char *values, char length){ char x; Wire.beginTransmission(BMP180_ADDR); Wire.write(values,length); _error = Wire.endTransmission(); if (_error == 0) return(1); else return(0);}char SFE_BMP180::startTemperature(void){ unsigned char data[2], result; data[0] = BMP180_REG_CONTROL; data[1] = BMP180_COMMAND_TEMPERATURE; result = writeBytes(data, 2);if (result) return(5); elsereturn(0); }char SFE_BMP180::getTemperature(double &T){ unsigned char data[2]; char result; double tu, a; data[0] = BMP180_REG_RESULT; result = readBytes(data, 2);if (result) { tu = (data[0] * 256.0) + data[1]; a = c5 * (tu - c6); T = a + (mc / (a + md)); } return(result);}char SFE_BMP180::startPressure(char oversampling){ unsigned char data[2], result, delay; data[0] = BMP180_REG_CONTROL; switch (oversampling) { case 0: data[1] = BMP180_COMMAND_PRESSURE0; delay = 5; break; case 1: data[1] = BMP180_COMMAND_PRESSURE1; delay = 8; break; case 2: data[1] = BMP180_COMMAND_PRESSURE2; delay = 14; break; case 3: data[1] = BMP180_COMMAND_PRESSURE3; delay = 26; break; default: data[1] = BMP180_COMMAND_PRESSURE0; delay = 5; break; } result = writeBytes(data, 2); if (result)return(delay); elsereturn(0); }char SFE_BMP180::getPressure(double &P, double &T)sealevel().{ unsigned char data[3]; char result; double pu,s,x,y,z; data[0] = BMP180_REG_RESULT; result = readBytes(data, 3);if (result) { pu = (data[0] * 256.0) + data[1] + (data[2]/256.0); s = T - 25.0; x = (x2 * pow(s,2)) + (x1 * s) + x0; y = (y2 * pow(s,2)) + (y1 * s) + y0; z = (pu - x) / y; P = (p2 * pow(z,2)) + (p1 * z) + p0; } return(result);}double SFE_BMP180::sealevel(double P, double A){ return(P/pow(1-(A/44330.0),5.255));}double SFE_BMP180::altitude(double P, double P0){ return(44330.0*(1-pow(P/P0,1/5.255)));}char SFE_BMP180::getError(void){ return(_error);}复制代码模块接线方式 1.先连接芯片与单片机(通过I2C接口),按照如下方式连接 5V—VIN GND–GND A5—SCL A4—SDA 2.然后UNO通过usb与PC电脑连接 3.拷贝后面的代码烧录进Arduino
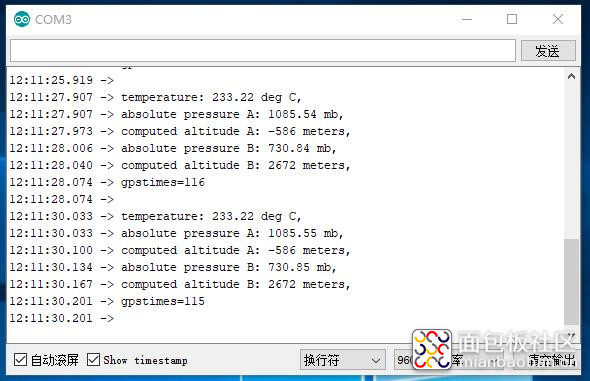
实验开源代码
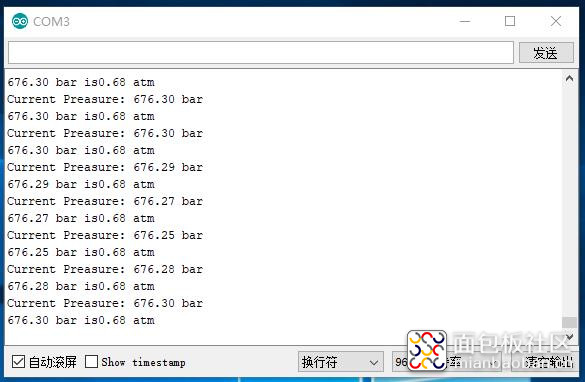
/* 【Arduino】168种传感器模块系列实验(67)实验六十七:BMP180 新款 BOSCH温度模块气压传感器(代替BMP085)程序之一*/#include <SFE_BMP180.h>SFE_BMP180 AirPresure;char presureDelayTime;double presureP, presureT;void setup() { Serial.begin(9600); AirPresure.begin();}void loop(){ presureDelayTime = AirPresure.startPressure(3); if (presureDelayTime != 0) { delay(presureDelayTime); presureDelayTime = AirPresure.getPressure(presureP, presureT); if (presureDelayTime != 0) { Serial.print("Current Preasure: "); Serial.print(presureP); Serial.println(" bar"); Serial.print(presureP); Serial.print(" bar is"); Serial.print(presureP / 1000.0); Serial.println(" atm"); } else { Serial.println("ERROR"); } } else { Serial.println("ERROR"); } delay(1000);}复制代码
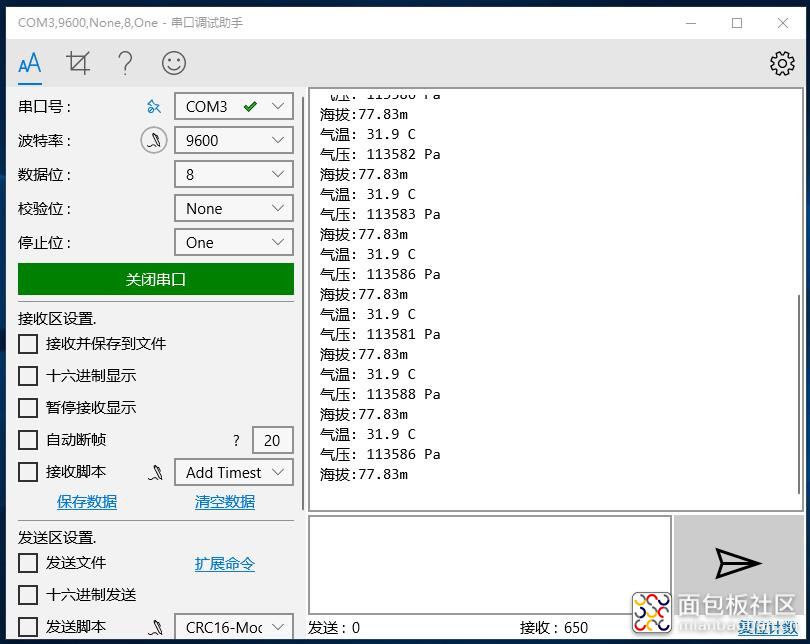
/* 【Arduino】168种传感器模块系列实验(67)实验六十七:BMP180 新款 BOSCH温度模块气压传感器(代替BMP085)程序之二,气温、气压与海拔值可以调整并校准*/#include <Wire.h>#define BMP180ADD 0x77 unsigned char OSS; int ac1; int ac2; int ac3; unsigned int ac4; unsigned int ac5; unsigned int ac6; int b1; int b2; int mb; int mc; int md; float temperature; double pressure; double pressure2;long b5; double altitude; void setup(){ Serial.begin(9600); Wire.begin(); OSS = 2; BMP180start();}void loop(){ calculate(); show(); delay(1000);}void calculate(){ temperature = bmp180GetTemperature(bmp180ReadUT()); temperature = temperature*0.0137; pressure = bmp180GetPressure(bmp180ReadUP()); pressure2 = pressure/115325; pressure2 = pow(pressure2,0.29029496); altitude = 39*(1+pressure2); }void show(){ Serial.print("气温: "); Serial.print(temperature, 1); Serial.println(" C"); Serial.print("气压: "); Serial.print(pressure, 0); Serial.println(" Pa"); Serial.print("海拔:"); Serial.print(altitude); Serial.println("m");}void BMP180start(){ ac1 = bmp180ReadDate(0xAA); ac2 = bmp180ReadDate(0xAC); ac3 = bmp180ReadDate(0xAE); ac4 = bmp180ReadDate(0xB0); ac5 = bmp180ReadDate(0xB2); ac6 = bmp180ReadDate(0xB4); b1 = bmp180ReadDate(0xB6); b2 = bmp180ReadDate(0xB8); mb = bmp180ReadDate(0xBA); mc = bmp180ReadDate(0xBC); md = bmp180ReadDate(0xBE);}short bmp180GetTemperature(unsigned int ut){ long x1, x2; x1 = (((long)ut - (long)ac6)*(long)ac5) >> 15; x2 = ((long)mc << 11)/(x1 + md); b5 = x1 + x2; return ((b5 + 8)>>4); }long bmp180GetPressure(unsigned long up){ long x1, x2, x3, b3, b6, p; unsigned long b4, b7; b6 = b5 - 4000; x1 = (b2 * (b6 * b6)>>12)>>11; x2 = (ac2 * b6)>>11; x3 = x1 + x2; b3 = (((((long)ac1)*4 + x3)<<OSS) + 2)>>2; x1 = (ac3 * b6)>>13; x2 = (b1 * ((b6 * b6)>>12))>>16; x3 = ((x1 + x2) + 2)>>2; b4 = (ac4 * (unsigned long)(x3 + 32768))>>15; b7 = ((unsigned long)(up - b3) * (50000>>OSS)); if (b7 < 0x80000000) p = (b7<<1)/b4; else p = (b7/b4)<<1; x1 = (p>>8) * (p>>8); x1 = (x1 * 3038)>>16; x2 = (-7357 * p)>>16; p += (x1 + x2 + 3791)>>4; return p;}int bmp180Read(unsigned char address){ unsigned char data; Wire.beginTransmission(BMP180ADD); Wire.write(address); Wire.endTransmission(); Wire.requestFrom(BMP180ADD, 1); while(!Wire.available()); return Wire.read();}int bmp180ReadDate(unsigned char address){ unsigned char msb, lsb; Wire.beginTransmission(BMP180ADD); Wire.write(address); Wire.endTransmission(); Wire.requestFrom(BMP180ADD, 2); while(Wire.available()<2); msb = Wire.read(); lsb = Wire.read(); return (int) msb<<8 | lsb;}unsigned int bmp180ReadUT(){ unsigned int ut; Wire.beginTransmission(BMP180ADD); Wire.write(0xF4); Wire.write(0x2E); Wire.endTransmission(); delay(5); ut = bmp180ReadDate(0xF6); return ut;}unsigned long bmp180ReadUP(){ unsigned char msb, lsb, xlsb; unsigned long up = 0; Wire.beginTransmission(BMP180ADD); Wire.write(0xF4); Wire.write(0x34 + (OSS<<6)); Wire.endTransmission(); delay(2 + (3<<OSS)); Wire.beginTransmission(BMP180ADD); Wire.write(0xF6); Wire.endTransmission(); Wire.requestFrom(BMP180ADD, 3); while(Wire.available() < 3); msb = Wire.read(); lsb = Wire.read(); xlsb = Wire.read(); up = (((unsigned long) msb << 16) | ((unsigned long) lsb << 8) | (unsigned long) xlsb) >> (8-OSS);//16 to 19 bit return up;}复制代码
|
|





 /2
/2 






yzw92 2020-12-28 06:35