
37款传感器与执行器的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止这37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手尝试系列实验,不管成功(程序走通)与否,都会记录下来---小小的进步或是搞不掂的问题,希望能够抛砖引玉。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验九十四:L298N电机驱动板模块直流步进电机智能机器人小车模组
L298N
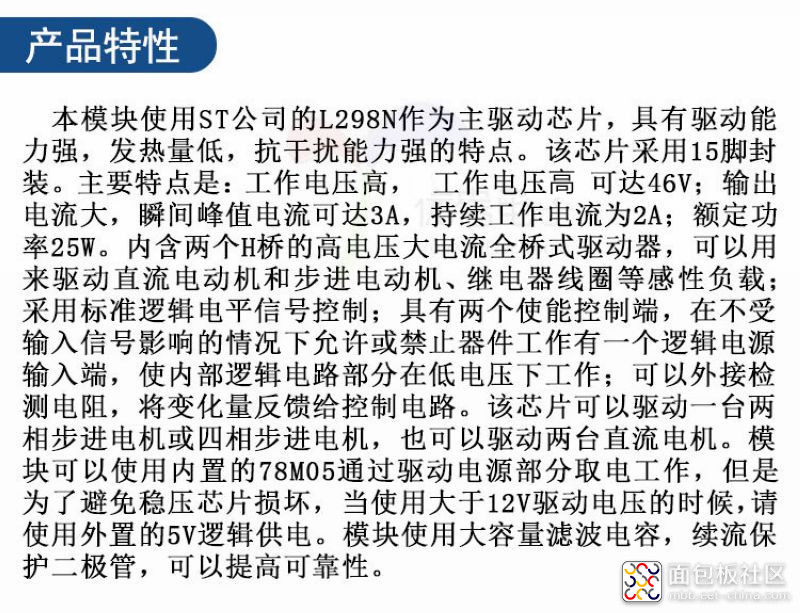
是专用驱动集成电路,属于H桥集成电路,与L293D的差别是其输出电流增大,功率增强。其输出电流为2A,最高电流4A,最高工作电压50V,可以驱动感性负载,如大功率直流电机,步进电机,电磁阀等,特别是其输入端可以与单片机直接相联,从而很方便地受单片机控制。当驱动直流电机时,可以直接控制步进电机,并可以实现电机正转与反转,实现此功能只需改变输入端的逻辑电平。
L298N芯片可以驱动两个二相电机,也可以驱动一个四相电机,输出电压最高可达50V,可以直接通过电源来调节输出电压;可以直接用单片机的IO口提供信号;而且电路简单,使用比较方便。
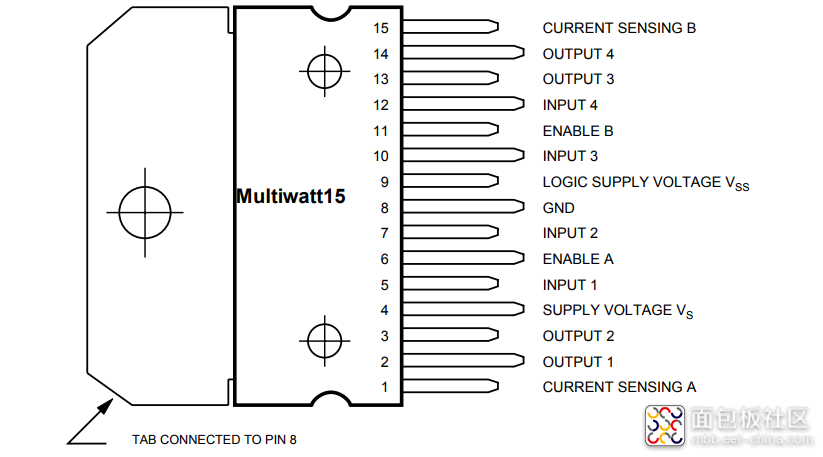
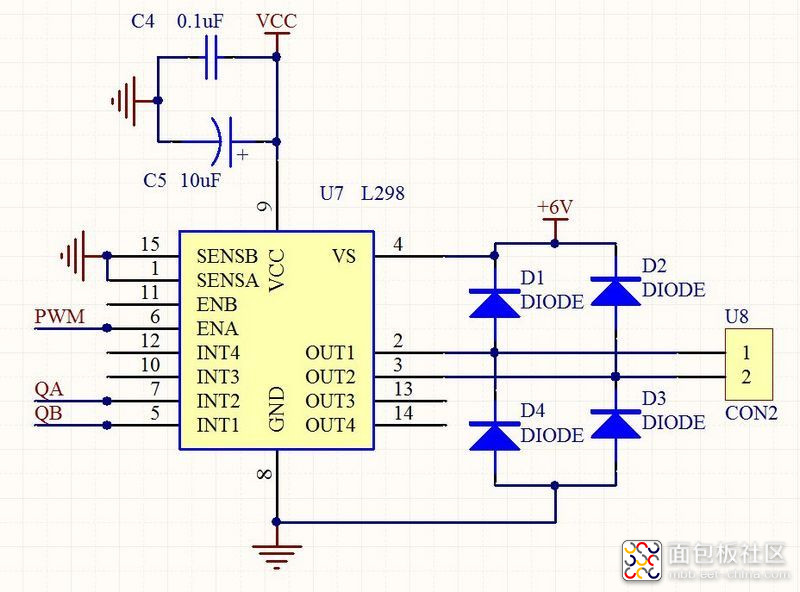
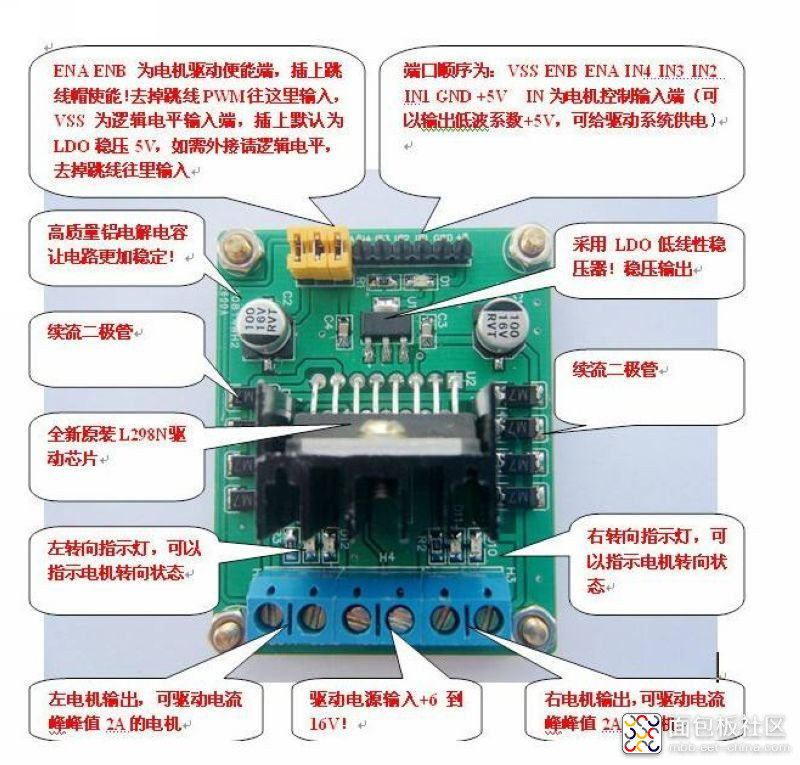
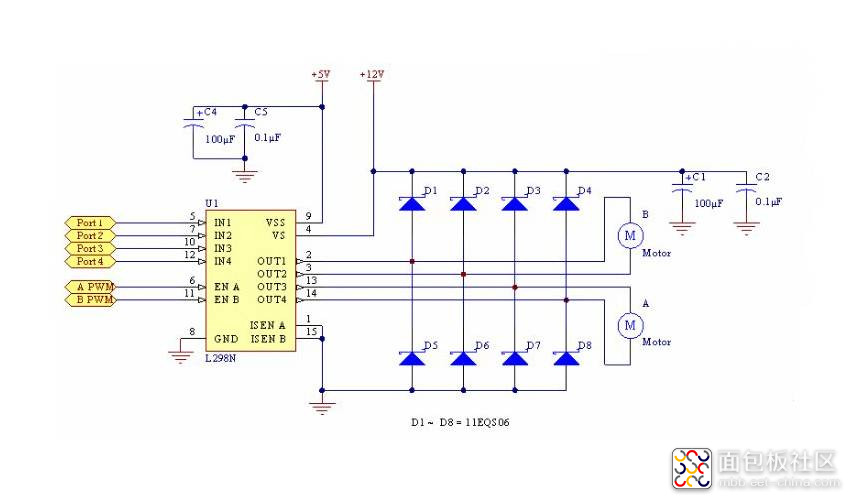
L298N可接受标准TTL逻辑电平信号VSS,VSS可接4.5~7V电压。4脚VS接电源电压,VS电压范围VIH为+2.5~46V。输出电流可达2A,可驱动电感性负载。1脚和15脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。L298可驱动2个电动机,OUT1,OUT2和OUT3,OUT4之间可分别接电动机,本实验装置我们选用驱动一台电动机。5,7,10,12脚接输入控制电平,控制电机的正反转。EnA,EnB接控制使能端,控制电机的停转。



L298N特性参数
类型: 半桥
输入类型:非反相
输出数:4
电流-输出/通道:2A
电流-峰值输出:3A
电源电压:4.5V~46V
工作温度:-25°C~130°C
安装类型:通孔
封装/外壳:MulTIwatt-15(垂直,弯曲和错列引线)
供应商设备封装:15-MulTIwatt
包装:管件
器件型号L298N
制造商STMicroelectronics
产品型号MotionMotorControl

L298N电机驱动板模块的参数
1.驱动芯片:L298N双H桥直流电机驱动芯片
2.驱动部分端子供电范围Vs:+5V~+35V ; 如需要板内取电,则供电范围Vs:+7V~+35V
3.驱动部分峰值电流Io:2A
4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)
5.逻辑部分工作电流范围:0~36mA
6.控制信号输入电压范围:
低电平:-0.3V≤Vin≤1.5V
高电平:2.3V≤Vin≤Vss
7.使能信号输入电压范围:
低电平:-0.3≤Vin≤1.5V(控制信号无效)
高电平:2.3V≤Vin≤Vss(控制信号有效)
8.最大功耗:20W(温度T=75℃时)
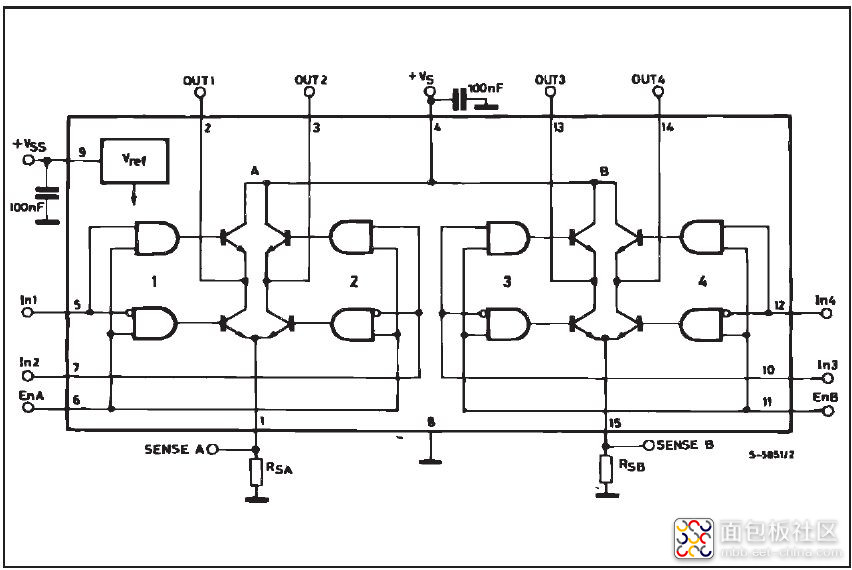
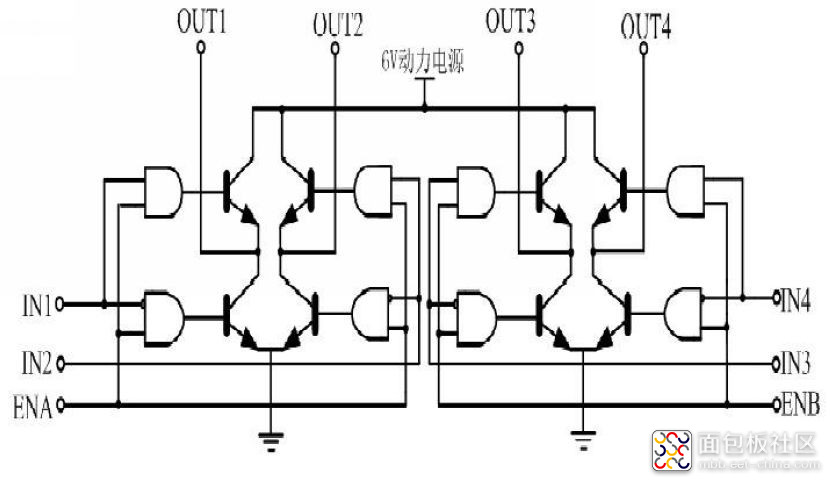
L298N电机驱动板模块电原理图
L298N电机驱动模块性能特点:
1:可实现电机正反转及调速。
2:启动性能好,启动转矩大。
3:工作电压可达到36V,4A。
4:可同时驱动两台直流电机。
5:适合应用于机器人设计及智能小车的设计。
情况一:用L298N驱动两台直流减速电机的电路。引脚A,B可用于PWM控制。如果机器人项目只要求直行前进,则可将IN1,IN2和IN3,IN4两对引脚分别接高电平和低电平,仅用单片机的两个端口给出PWM信号控制使能端A,B即可实现直行、转弯、加减速等动作。
情况二:用L298实现二相步进电机控制。将IN1,IN2和IN3,IN4两对引脚分别接入单片机的某个端口,输出连续的脉冲信号。信号频率决定了电机的转速。改变绕组脉冲信号的顺序即可实现正反转。
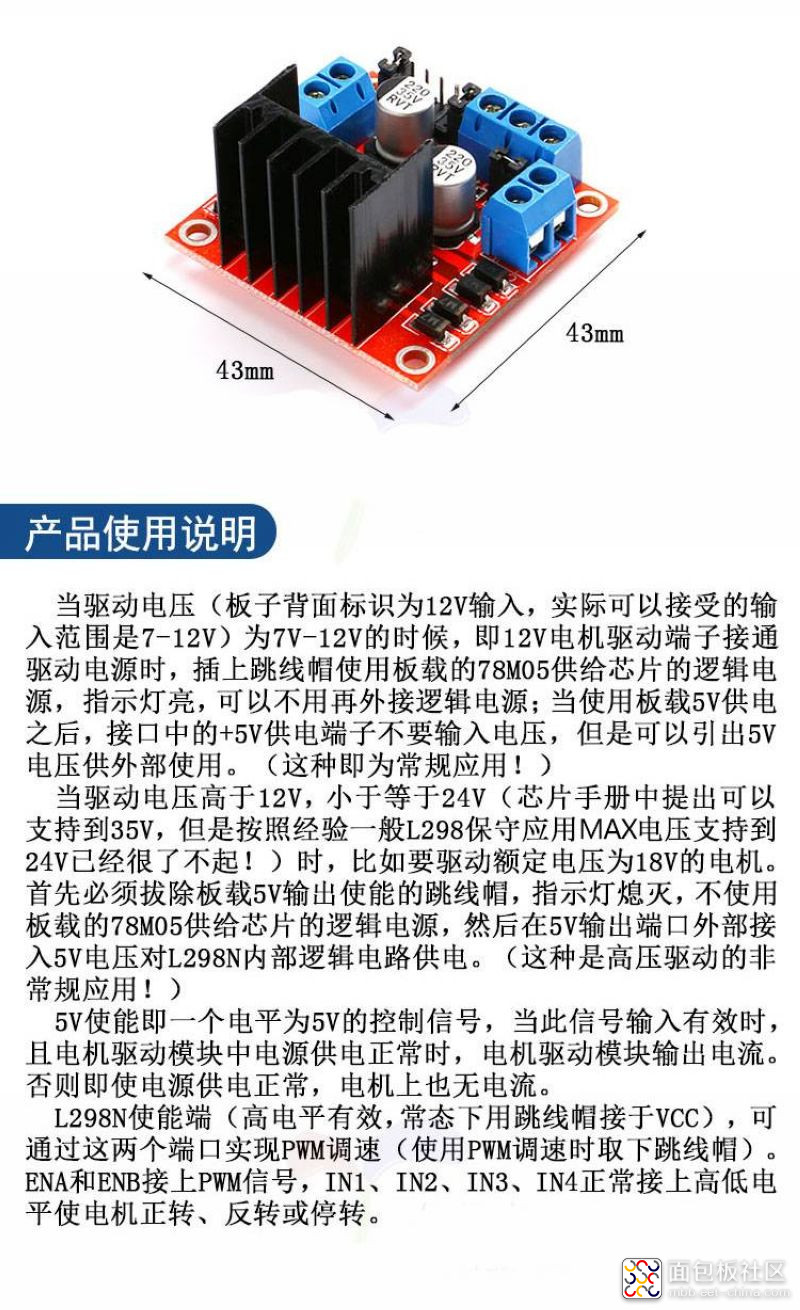
注意事项:
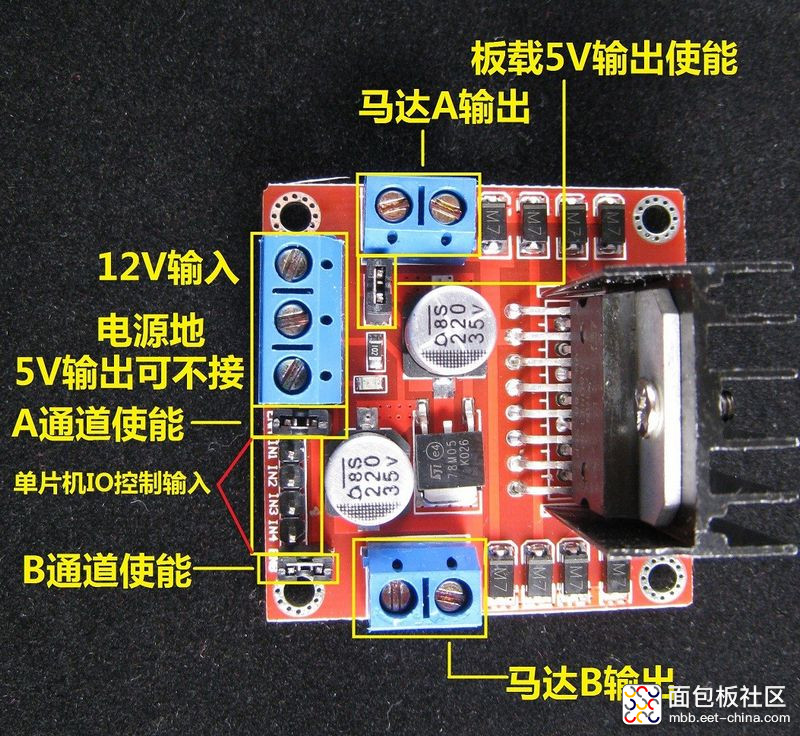
1.当你的驱动电压(上图标识为12V输入,实际可以接受的输入范围是7-12V)为7V-12V的时候,可以使能板载的5V逻辑供电,当使用板载5V供电之后,接口中的+5V供电不要输入电压,但是可以引出5V电压供外部使用。(这种即为常规应用!)
2.当驱动电压高于12V,小于等于24V(芯片手册中提出可以支持到35V,但是按照经验一般298保守应用最大电压支持到24V已经很了不起!)时,比如要驱动额定电压为18V的电机。首先必须拔除板载5V输出使能的跳线帽。然后在5V输出端口外部接入5V,5V使能即 一个电平为5V的控制信号,当此信号输入有效时,且电机驱动模块中电源供电正常时,电机驱动模块输出电流。否则即使电源供电正常,电机上也无电流。电压对L298N内部逻辑电路供电。(这种是高压驱动的非常规应用!)
3、L298N供电的5V如果是用另外电源供电的话,(即不是和单片机的电源共用),那么需要将单片机的GND和模块上的GND连接在一起,只有这样单片机上过来的逻辑信号才有个参考0点。此点非常重要,请注意。
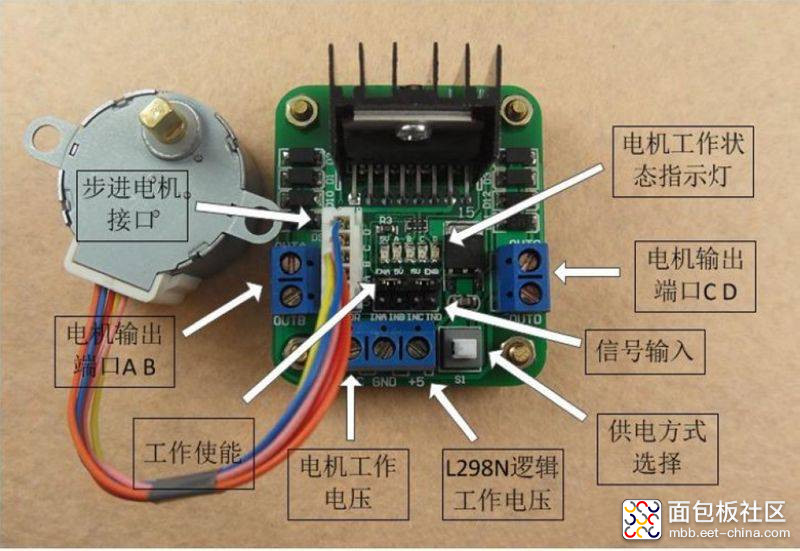
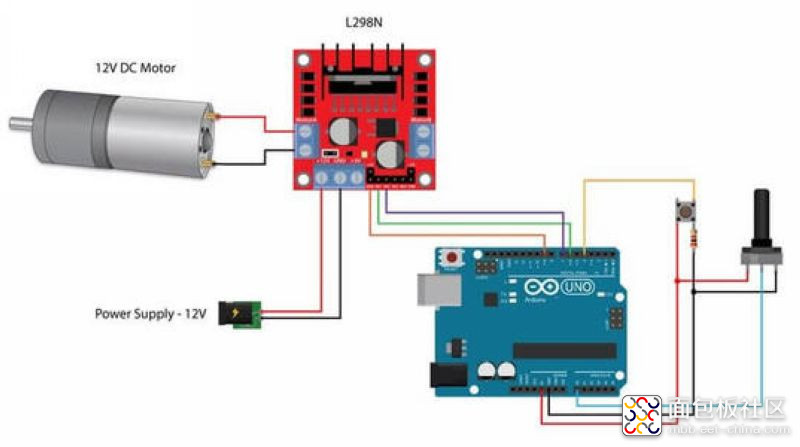
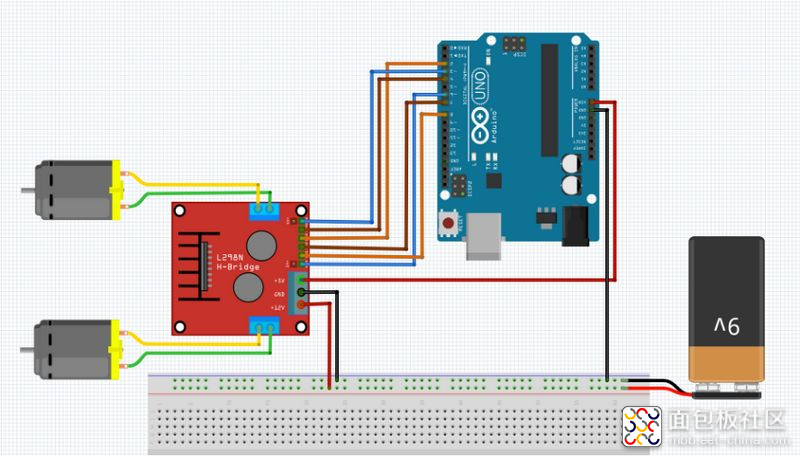
L298N电机驱动模块实验接线示意图
实验开源代码
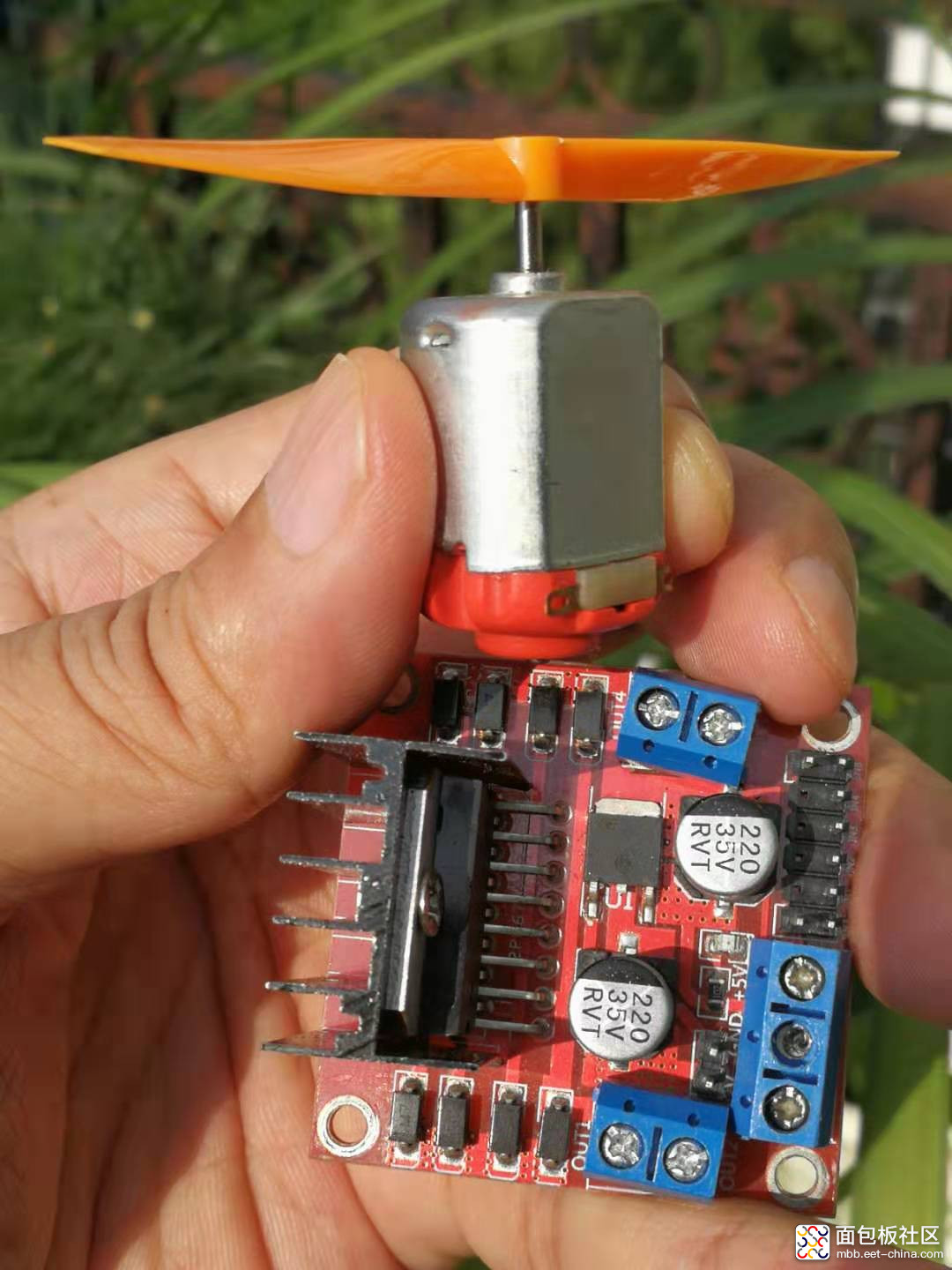
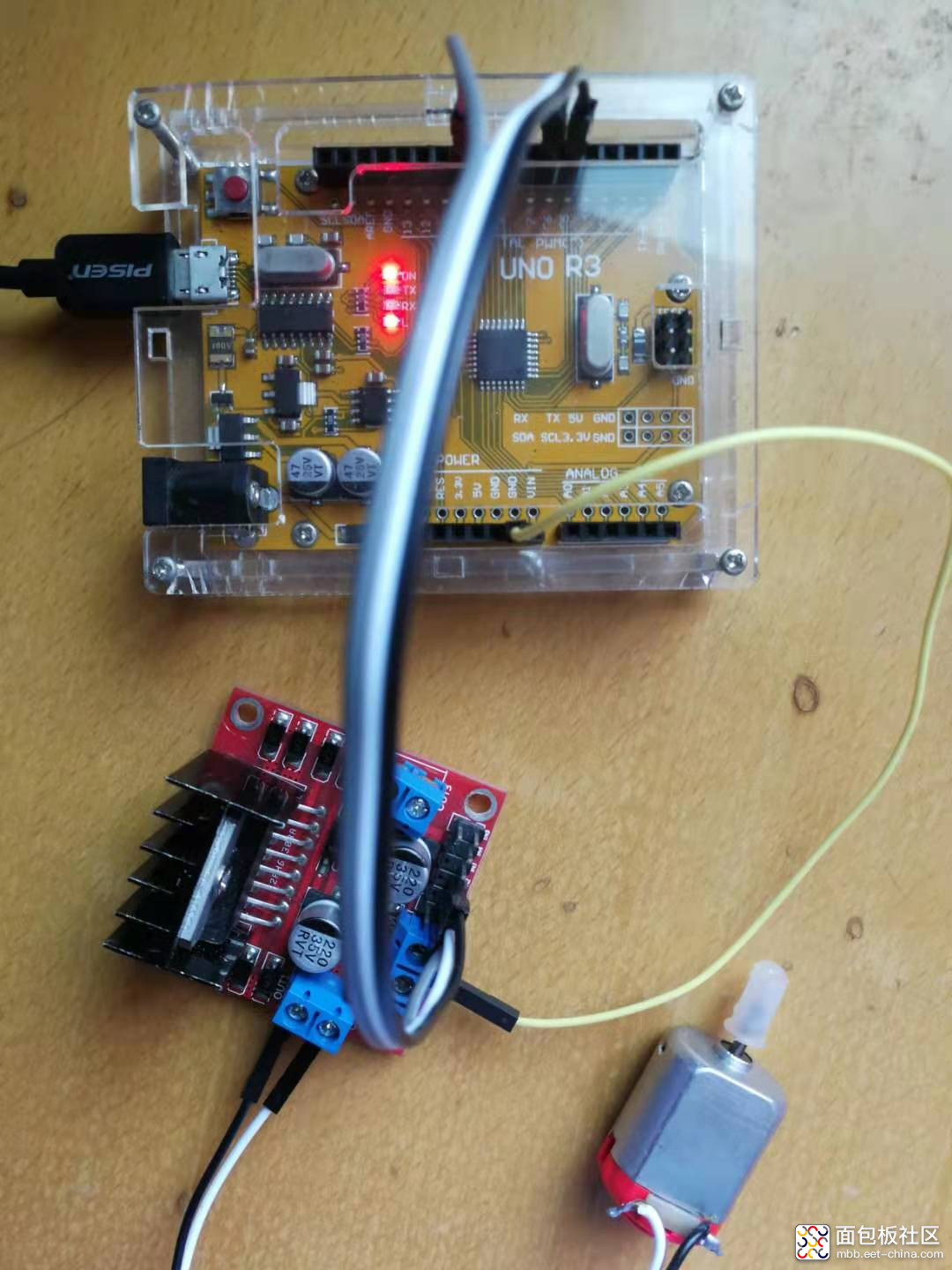
实验场景图
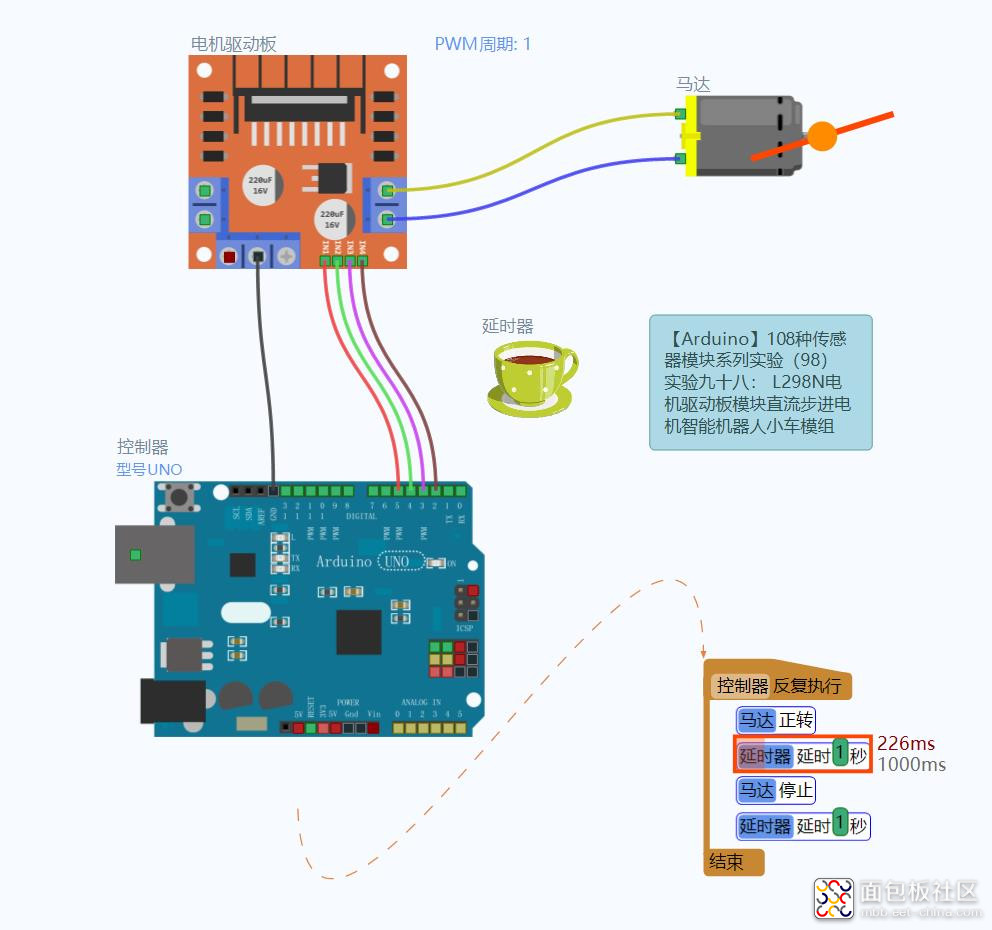
实验开源仿真编程(Linkboy V4.62)
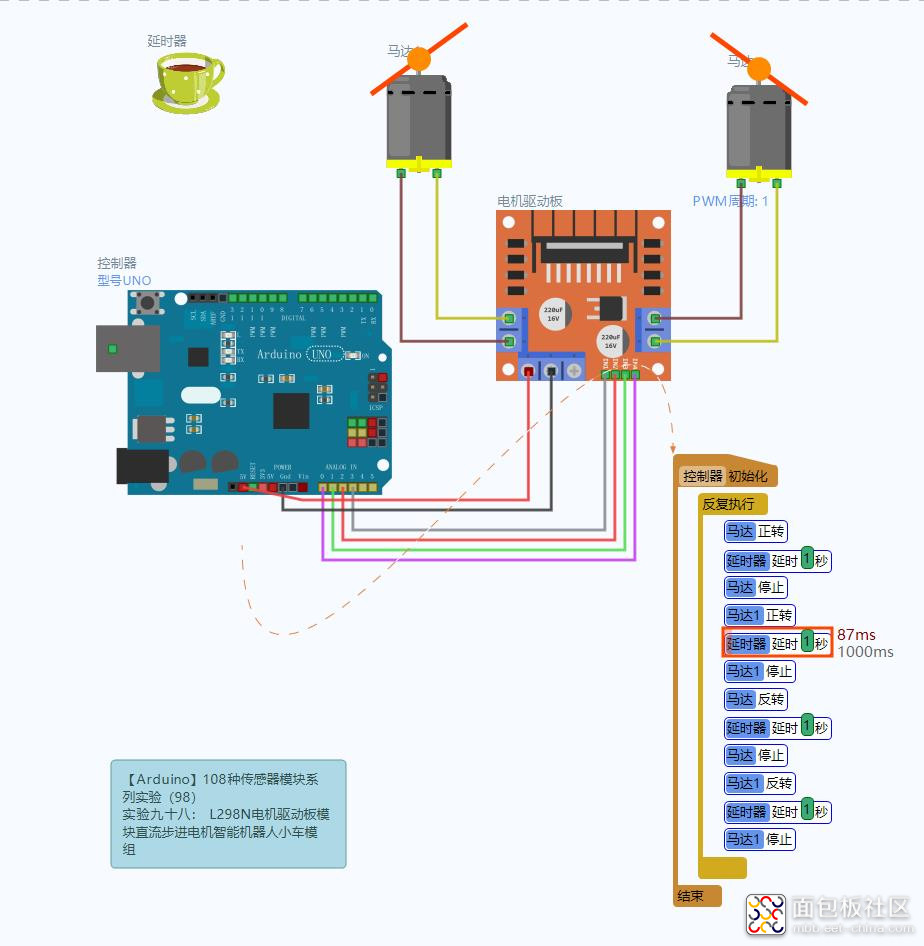
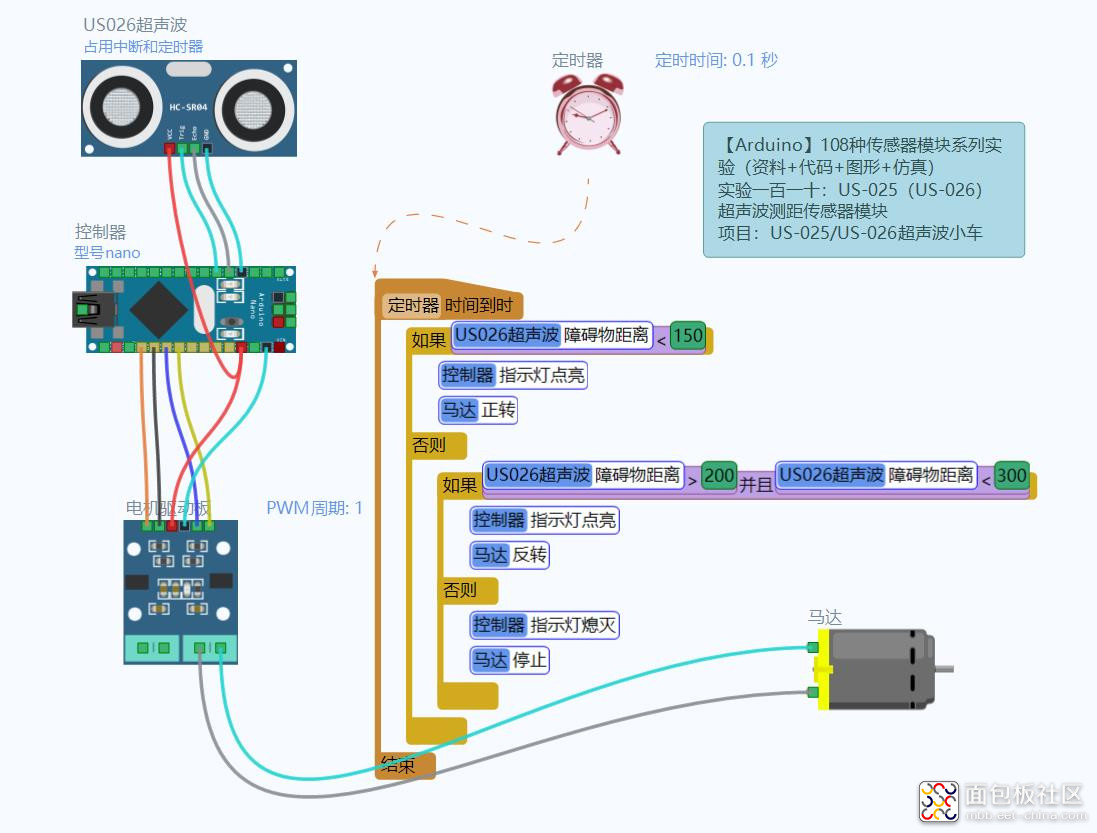
实验开源图形编程(Mind+、Mixly、编玩边学)
打开Mind+,搜索用户库“L298”


作者: 雕爷学编程, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3894459.html
版权声明:本文为博主原创,未经本人允许,禁止转载!


 /2
/2 






文章评论(0条评论)
登录后参与讨论