
一、汽车HiL测试的概念
硬件在环(Hardware-in-the-Loop,简称HiL)仿真测试,是模型基于设计(Model-Based Design,简称MBD)验证流程中的一个关键环节。该步骤至关重要,因为它整合了实际操作中将使用的全部硬件与软件资源。HiL测试通常位于现场试验之前,是模型在环(Model-in-the-Loop,简称MiL)、软件在环(Software-in-the-Loop,简称SiL)或处理器在环(Processor-in-the-Loop,简称PiL)测试之后的最终阶段。HiL仿真不仅能够针对单个被测设备(Device Under Test,简称DUT)进行精确测试,而且还能对由多个被测设备构成的复杂系统进行全面的测试与验证。
在整个测试流程中:
而HiL(Hardware-in-the-Loop)硬件在环仿真测试系统是采用实时处理器运行仿真模型来模拟受控对象(比如:汽车、飞机等设备)的运行状态,以此判断电控模块的性能。虽然这一系列的测试都有在环(in the loop)的意思,但是却不是全部的被测模块都带有闭环的。比如接收到某信号要用于车辆的车灯控制,这种情况下我们就不需要闭环,但是如果在自动驾驶的HiL测试中,想使用GNSS模拟器测试汽车运行是否正常,就需要把自动驾驶仪的信息返回到GNSS模拟器中形成闭环,再进行下一个轨迹的模拟。
在HiL测试中,一般根据它在环的深度分为几个层级:
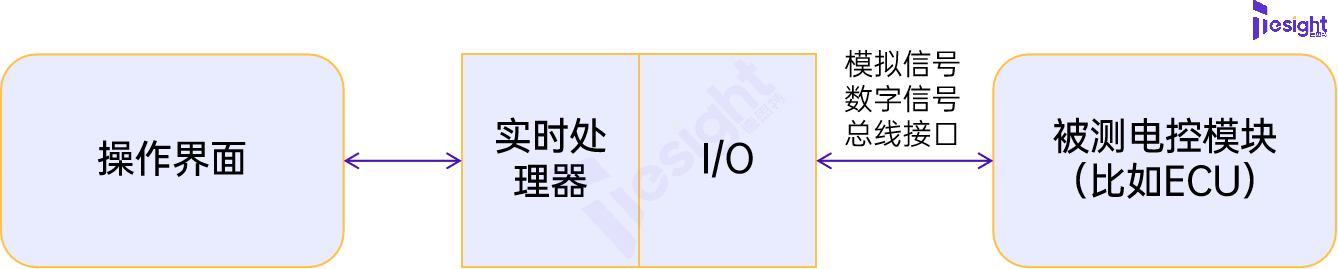
总的来说,HiL测试系统主要由三个基本部分组成,分别是实时处理器、I/O接口和可视化的操作界面,其中实时处理器是整个HiL测试系统的核心部分。实时处理器运行场景,发送信号,被测电控模块收到后对受控对象做出相应的控制,以此判断电控模块的性能。通过I/O接口与被测的设备/模块连接,对被测系统进行全方面的、系统的测试,如下图:
二、HiL测试的意义
HiL仿真测试可以使得工程师了解硬件在现实世界中的性能,而无需将其带到户外测试:
三、GNSS仿真在HiL测试中的作用
在闭环体系结构中,仿真系统的延迟是一个关键参数。理想情况下,任何轨迹修改都应立即反映在GNSS接收器的RF输入上。
GNSS是汽车HiL测试的重要组成部分,为了准确安全地实现车辆定位与导航,现在的车辆都会使用多个传感器以及复合定位导航技术,因此需要进行传感器融合测试确保结果安全可靠。
GNSS 系统在传感器融合中发挥着至关重要的作用,GNSS 是一辆车上唯一可以提供绝对位置与绝对时间的传感器,且不受光照、地理位置、天气状况的影响。
GNSS接收机不是作为一个独立的设备进行测试,而是与其他模拟器、设备和传感器集成,存在两种类型的HiL架构。
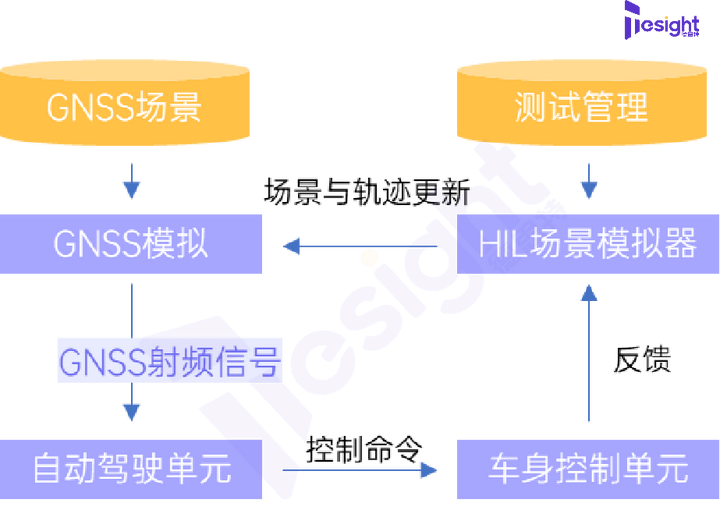
在闭环体系结构中,仿真系统的延迟是一个关键参数。理想情况下,任何轨迹修改都应立即反映在GNSS接收器的RF输入上。
四、软件定义的GNSS模拟器
高性能GNSS模拟器具有灵活的软件定义平台和API,且支持所有的GNSS星座与波形,具有超高的精度,分辨率,以及动态性能,模拟迭代率可达1000 Hz,强大的软件定义实现通道数无限制。广泛应用于汽车HIL测试,导航芯片、消费电子、终端测试,航空航天模拟,以及干扰抵抗测试等领域。

(() => { window.addoncropExtensions = window.addoncropExtensions || []; window.addoncropExtensions.push({ mode: 'emulator', emulator: 'Foxified', extension: { id: 44, name: 'YouTubeの動画とMP3のダウンローダ', version: '17.3.7', date: 'August 6, 2023', }, flixmateConnected: false, }); })();



 /4
/4 






文章评论(0条评论)
登录后参与讨论