
什么是UWB呢?
所谓UWB(Ultra Wide Band,超宽带),是一种利用超宽带无线载波通信技术的芯片,它通过极短的电磁脉冲来传输数据,并计算从接收器和发射器之间的时间差来确定物体的位置,可以在几厘米到几毫米的范围内定位目标。UWB所使用的频段包括3.1-4.8GHz低频段和6-10.6GHz高频段两种,因此被称为“超宽带”。
与不少最近热门的技术一样,UWB(Ultra-Wideband)技术也不是最新才出现的,同样是“科技考古”和“军转民”的产物。其起源于上世纪60年代,UWB技术最初用于军事领域,特别是在雷达和定位系统中。由于其宽频带特性和低功率传输,UWB信号具有较好的穿透能力和抗干扰能力。而在90年代,随着苏联的轰然倒塌,冷战结束,许多军事技术开始转向民用。UWB技术也逐渐被应用于商业领域,如无线通信、无线传感器网络和定位系统。2002年,美国联邦通信委员会(FCC)批准了UWB技术在民用领域的使用,为UWB技术的发展和应用奠定了基础。此后,其他国家和地区也陆续批准了UWB技术的民用使用,而为了进一步推动UWB技术的标准化,国际电信联盟(ITU)和欧洲电信标准协会(ETSI)等组织开始制定相关的国际标准。这些标准包括物理层(PHY)和数据链路层(MAC)的技术规范,为UWB设备的研发和生产提供了依据。而到如今,随着物联网和智能设备的快速发展,UWB技术开始应用于更多新兴领域。例如,UWB技术可以用于精确室内定位、无线充电、智能家居设备之间的通信等。那么UWB是如何做到精确定位的呢?
UWB如何实现精准定位?
要想了解UWB芯片为什么能实现精准的定位,就要先了解到两个UWB领域简单的基础概念:锚点和标签。
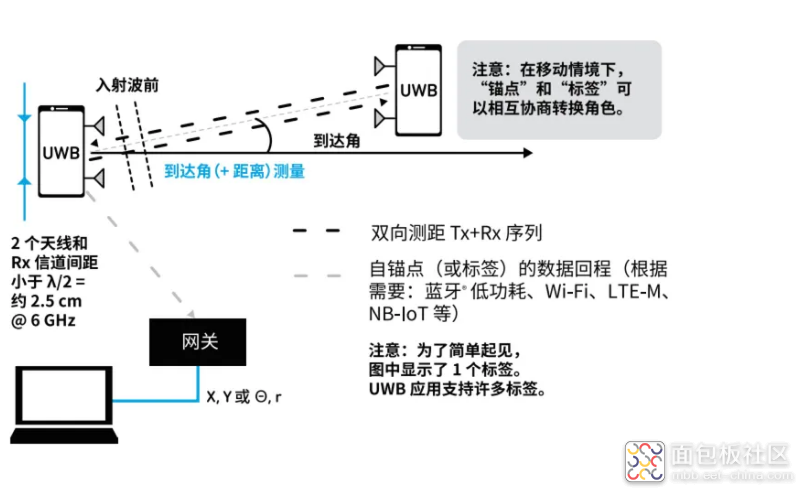
锚点和标签可交换信息,以便确定两者之间的距离。标签的确切位置可通过与多个锚点通信来确定。一些设备可作为锚点,也可作为标签。例如,当两个移动手机使用UWB来计算相互之间的距离时,它们可以在计算过程中转化角色,交替地用作标签和锚点。
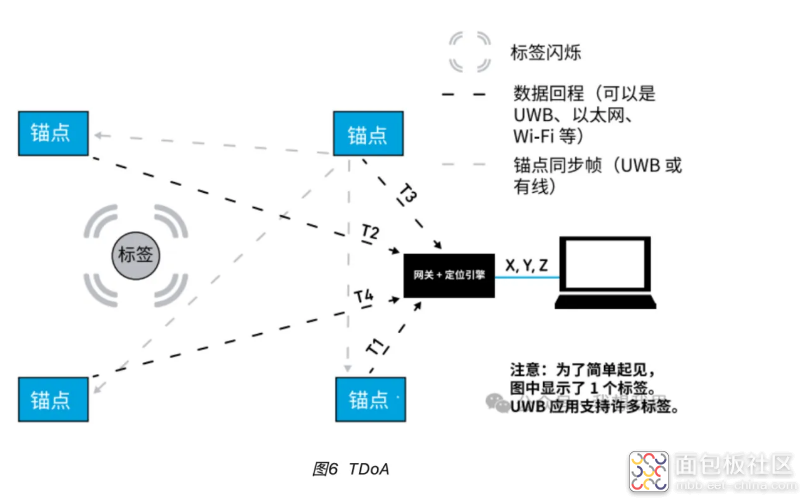
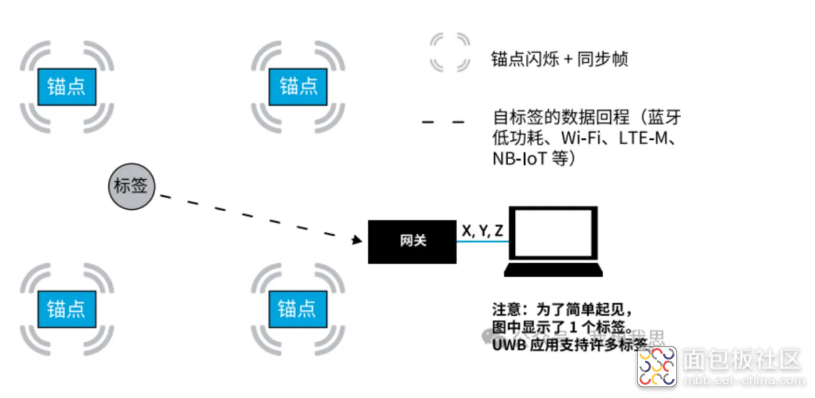
UWB定位技术主要基于三种原理:双向测距(TWR)、到达时间差(TDoA)和到达相位差(PDoA),每种原理都有其独特的应用场景和优势。
首先,我们先来看看双向测距(TWR)技术。其原理十分直观就是通过测量信号往返于标签和锚点之间的时间(即往返时间),并乘以光速,来计算两者之间的距离。在具体的实现上,第一步是由设备A(发起者)发送一个特殊的UWB脉冲信号给设备B(接收者)用于初始化;第二步为第一轮时间戳记录,设备A在发送信号时记录下时间戳T1,设备B在接收到信号时记录下时间戳T2;第三步,为建立应答信号,设备B在接收到信号后,会立即发送一个应答信号给设备A,并在发送时记录下时间戳T3;第四步会记录第二轮时间戳,设备A在接收到应答信号时记录下时间戳T4;而最后一步,就是计算距离,设备A和设备B通过交换这些时间戳,可以计算出信号在两个方向上的传播时间。假设信号在两个方向上的传播速度相同,则可以计算出两个设备之间的距离。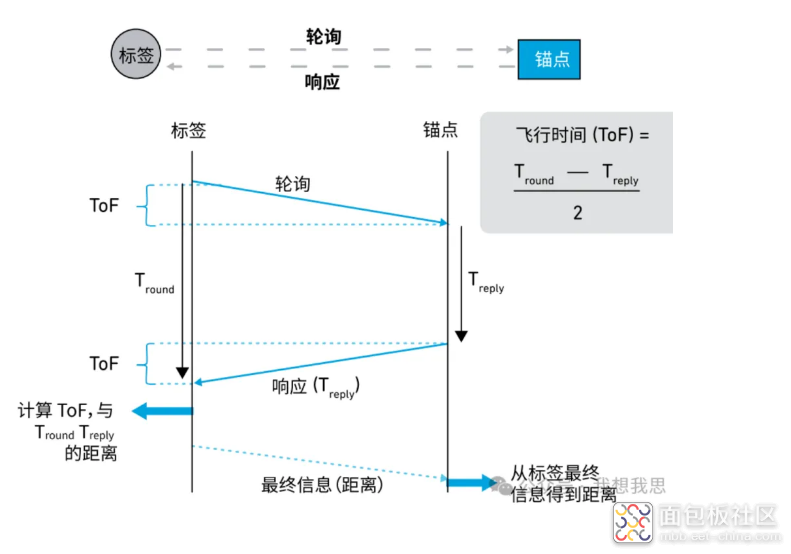
UWB技术作为一种近几年重新兴起的定位技术,凭借其高精度、低功耗、抗干扰等优势,在各个领域展现出巨大的应用潜力。从苹果的AirTag到智能家居,从工业自动化到医疗健康,UWB技术正在改变着我们的生活和工作方式。
随着UWB技术的不断发展和完善,我们可以期待更多创新应用的出现。例如,在自动驾驶领域,UWB技术可以用于实现车辆之间的精确距离测量和位置感知,从而提高自动驾驶的安全性;在智慧城市领域,UWB技术可以用于构建高精度室内外定位系统,为市民提供更加便捷的生活服务;在智能制造领域,UWB技术可以用于实现设备的精准定位和跟踪,提高生产效率和安全性。随着技术的不断进步和应用场景的不断拓展,相信UWB技术将会在未来发挥更大的作用,为人类社会带来更多的便利和福祉。
作者: 丙丁先生, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3996156.html
版权声明:本文为博主原创,未经本人允许,禁止转载!



 /4
/4 






文章评论(0条评论)
登录后参与讨论