
背景介绍
提起“匮电”二字,做测试的老司机定会虎躯一震,而根据过往经验,“网络管理”常是引起匮电的“钉子户”,所以针对网络管理的验证是测试的重中之重。
国内网络管理应用已从早期OSEK NM过渡到AUTOSAR NM,部分OEM使用了AUTOSAR NM的PN特性,本文从NM概念用途、PN的实现方式、CANoe下实现PN网络管理测试思路几个方面展开介绍。
什么是网络管理
汽车上的ECU在工作的时候需要通过网络来与其它ECU进行数据交换,而在不工作的时候需要进入低功耗状态来尽可能减少电量消耗。比如:
当拉动门把手准备使用车辆时,需某ECU接收到这个信息后在短时间能够从低功耗状态进入工作状态,并且快速地唤醒其它ECU,然后经过诸如用户认证等功能来使车辆能够被正常使用
当锁车离开后,相关ECU也需要判断这个信息,然后决定车辆需要进入非工作状态,网络通信需要被关闭且ECU需要进入低功耗状态
上述的工作循环可以概括为:
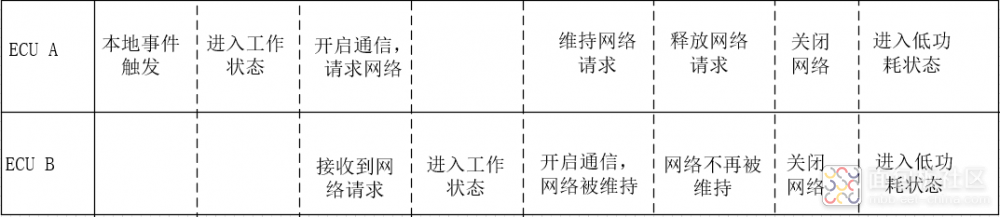
图1 工作循环示例
而这样的网络行为正是通过网络管理来实现的。
什么是PN网络管理
PN (Partial Network)即“局部网络”,通过一些规则(通常按照功能类)将车辆网络进一步划分为不同的“局域网”(类同于GM Global A架构中Virtual Network),通过PN网络管理处理其各种状态。
为什么需要PN
传统网络管理采用的是简单明了的“同醒同睡”的方式,但在一些场景中,我们只需要网段中有限的ECU参与工作,而不是全部的ECU,这造成了多余的电量消耗。
在ECU数量较少时还可以接受,但随着ECU的数量的增加,这个“浪费”问题就显得更为突出(当然,也可以通过设计不同的电源回路/模式控制ECU的供电等方案,但难以达到理想状态且会增加其它问题)。
PN正是通过对于网络的再次细分,在不同的场景下使不同的ECU处于工作状态,而无关的ECU仍处于低功耗状态,以达到进一步减少电量消耗的目的。
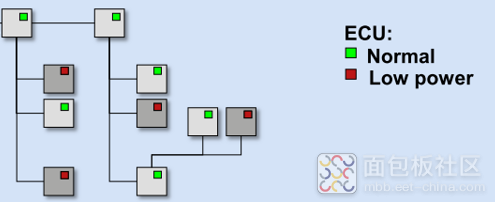
图2 PN网络示例
NM PDU
ECU请求网络以及接收到其它ECU的网络请求是通过NM PDU (Network Management Protocol Data Unit)来实现的。
以CAN网络为例,简单来说,当ECU需要请求网络时需要发送NM PDU;不需要请求网络时停止发送NM PDU。其它ECU在接收到NM PDU时,认为网络被请求。PN信息的接收发送也是类似,只是它是通过信号的形式在NM PDU中更新。
在AUTOSAR中,通常使用8个字节的数据分配给NM PDU,包含Source Node ID,CBV (Control Bit Vector)和User Data,其中User Data为用户自定义的内容,使用PN的情况下将全部或者部分User Data用于定义一组PN。
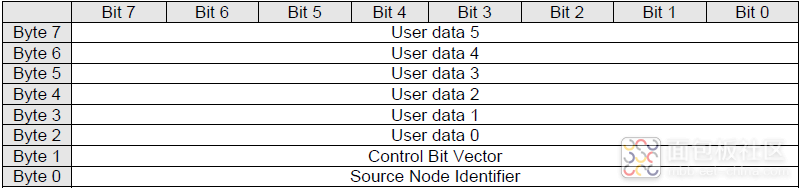
图3 NM PDU格式
CBV包含了NM模块的一些控制信息,使用PN时需要使用Partial Network Information Bit。

图4 CBV内容
除了上述的用于CAN/CAN FD的NM PDU外,PN网络管理还可以支持FlexRay。在FlexRay的NM PDU中,需要分为NM-Vote PDU和NM-Data PDU。CAN和FlexRay来说NM PDU有一些差异,但是其对于PN信息的处理是一样的。
状态机
ECU通过接收和发送NM PDU来传递网络管理的信息,而这些信息也决定ECU所处的状态。
以CAN通信为例,NM模块包含NM的状态机,针对ECU的通信端口,表示端口所处的网络管理状态,简单来说为网络的请求和释放。
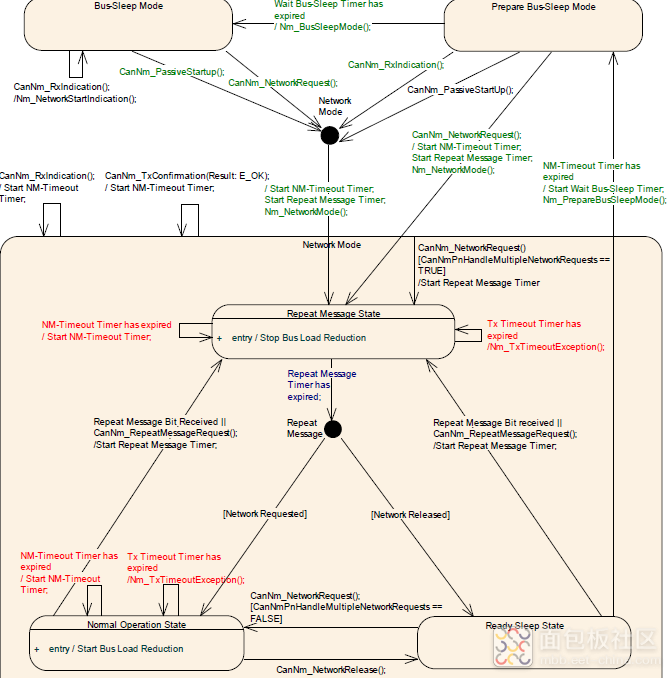
图5 NM状态机
而对于PN网络来说,还包含PN的状态机,针对ECU所关联的PN,表示PN的状态,简单来说为PN的请求和释放。
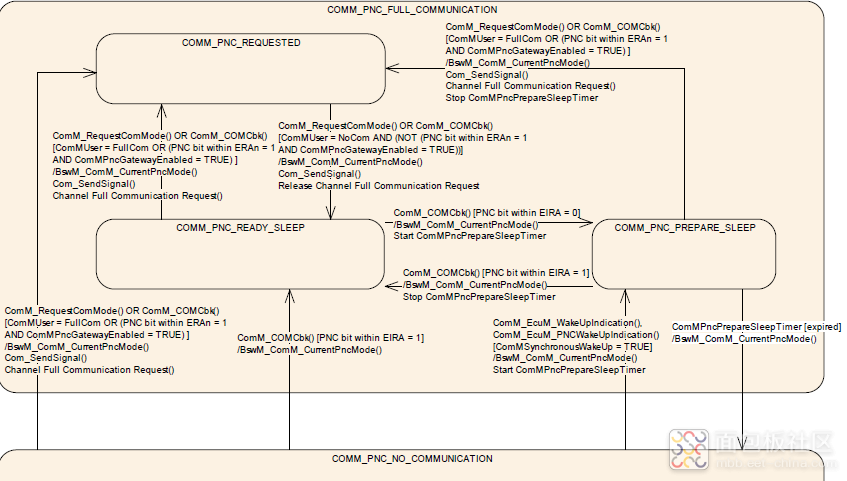
图6 PNC状态机
而上述两者需要反馈到通信的状态上,因此还存在通信的状态机,针对ECU的通信端口,表示通信的状态,简单来说为通信的开启和关闭。
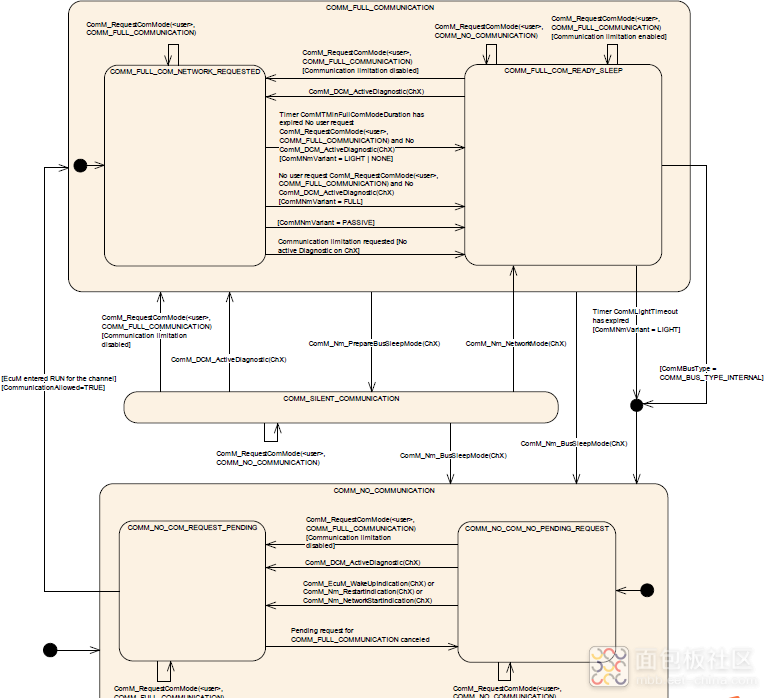
图7 ComM channel状态机
这些状态机需要共同作用,使ECU能正常的休眠和唤醒。当然,这个过程还关联有其它的状态机,在此就不赘述,有兴趣的可以参考AUTOSAR的规范。
PN网络管理测试方案
通过上述的内容,可以看到,其实PN网络管理只是在传统网络管理的基础上将PN信息添加在NM PDU中供ECU识别(当然这个说法忽略了大量细节,但就测试方案来说还可以接受)。如果被测ECU只包含1个通信端口(如1个CAN端口),我们采用的测试思路可以是:
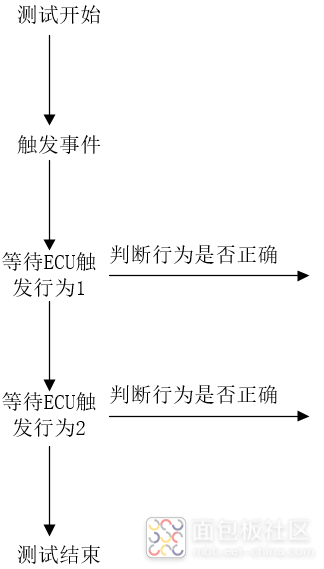
图8 测试方案1
然而,当ECU的复杂性增加时,这种判断的方法就变得比较困难。比如某个ECU包含2个通信端口,触发某个事件后,其网络行为可能为:
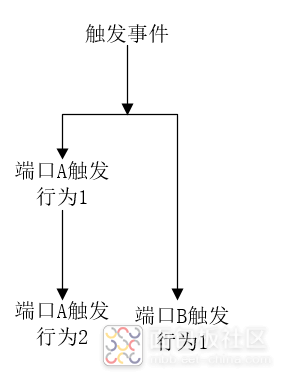
图9 网络行为示例
这个情况在使用PN时更加常见,尤其是当这个ECU作为中央网关或将来的域控制器,需要将PN从一个网段路由到另一个网段。当然,对于单个部件的环境来说,这种行为还处于可控、有序的状态,如果放在系统级、实车环境中,先前的测试思路就会变得“一团乱麻”。
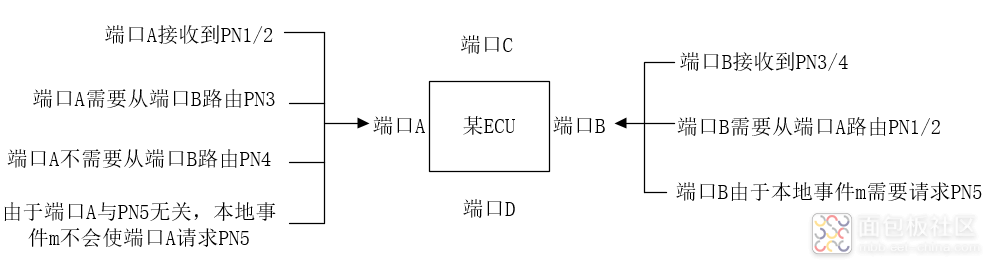
图10 网络行为示例2
因此必须要有新的思路和方法,北汇在长期工程实践中积累了特有的方案,借助于Vector公司的CANoe所提供灵活而强大的函数库,实现了对上述问题的“解耦”,从而解决这个“老大难”。如下为使用新方法,在CANoe环境下开发测试工程并自动生成的针对部件和系统级的测试报告。
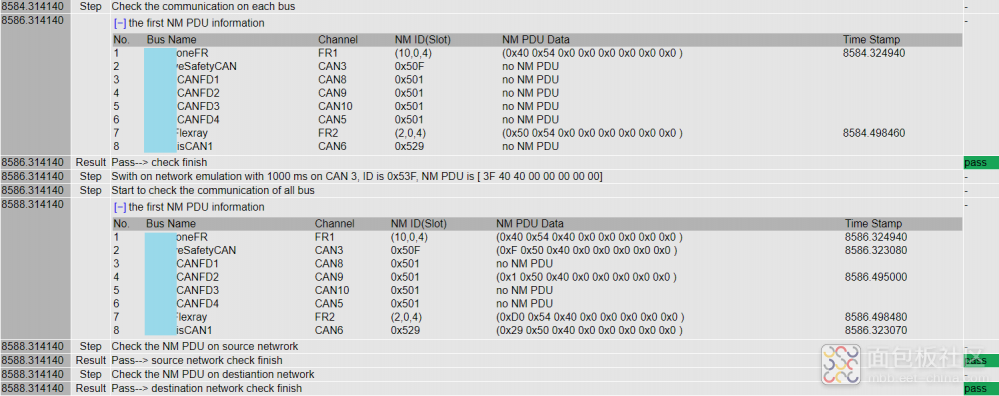
图11 CANoe自动生成节点级PN测试报告示例
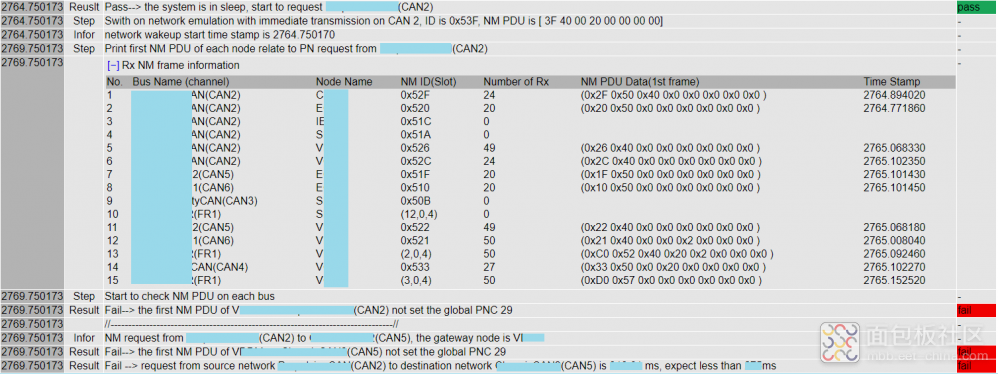
图12 CANoe自动化生成PN系统级测试报告示例
总结
网络管理是车载网络中非常重要也是比较复杂的内容,一方面它与功能有强相关性,不同的功能需求就可以有不同的网络行为,从而影响网络管理的状态;另一方面,网络管理本身强调逻辑,需提供足够的信息,实现与硬件接口间的交互;更困难的点在于网络管理涉及时序的控制,这就不可避免地与ECU的各种中断程序、各种随机事件耦合,会出现很多疑难杂症。
尤其是在系统层面,常会出现类似:A影响B,B影响C,C影响A,小问题累积成大问题,产生各种异常行为的情况。这也对测试规范的开发提出了更高的要求,即要验证逻辑又要覆盖场景。
随着以太网将成为主干网,随之SoA及网络动态配置应用,网络管理也将会迎来新的变化和调整。
仅以此篇文章投石问路,共同面对新的挑战。做好当下,即(不)是(畏)未来!
注:文中部分图片来源于AUTOSAR
参考文献
[1] AUTOSAR_SWS_CANNetworkManagement
[2] AUTOSAR_SWS_FlexRayNetworkManagement
[3] AUTOSAR_SWS_COMManager
作者: 北汇信息, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3998886.html
版权声明:本文为博主原创,未经本人允许,禁止转载!






 /2
/2 





文章评论(0条评论)
登录后参与讨论