
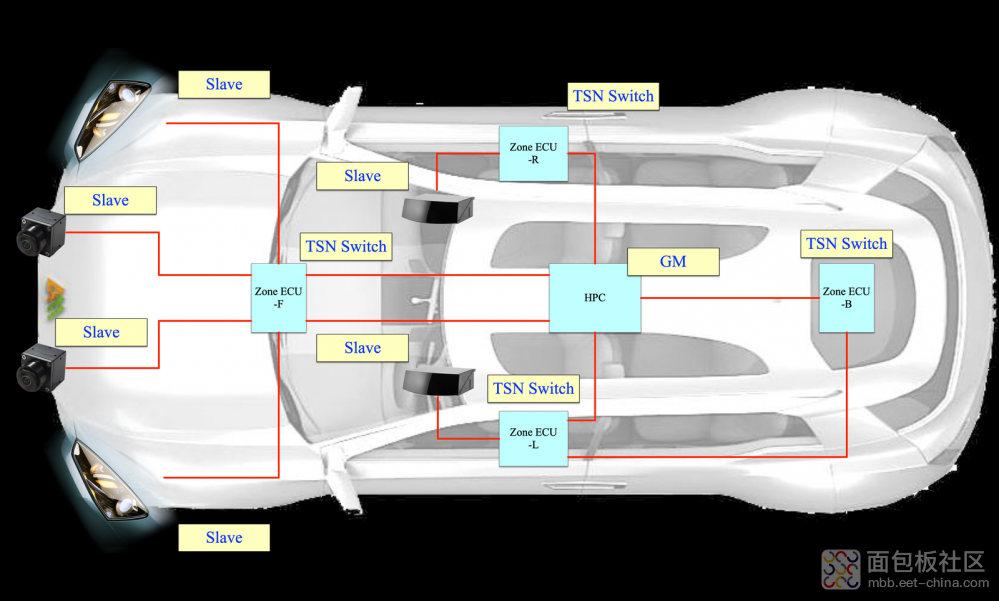
在上一篇文章中,我们概述性地介绍了北汇信息的TSN网络原型设计。本篇文章将基于该原型,通过在多个场景中验证TSN协议的效果,向读者展示TSN在车载网络中的价值。通过实验验证,我们将深入了解TSN技术在车载网络中的实际应用和性能表现,为读者提供更为深入的了解和参考。
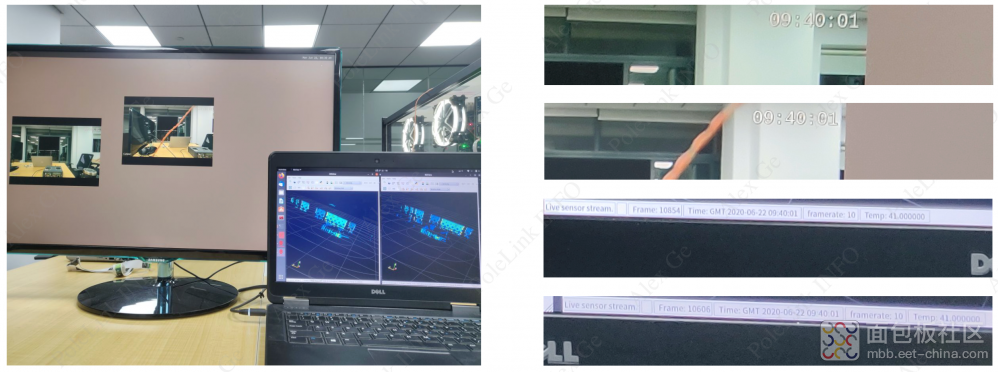
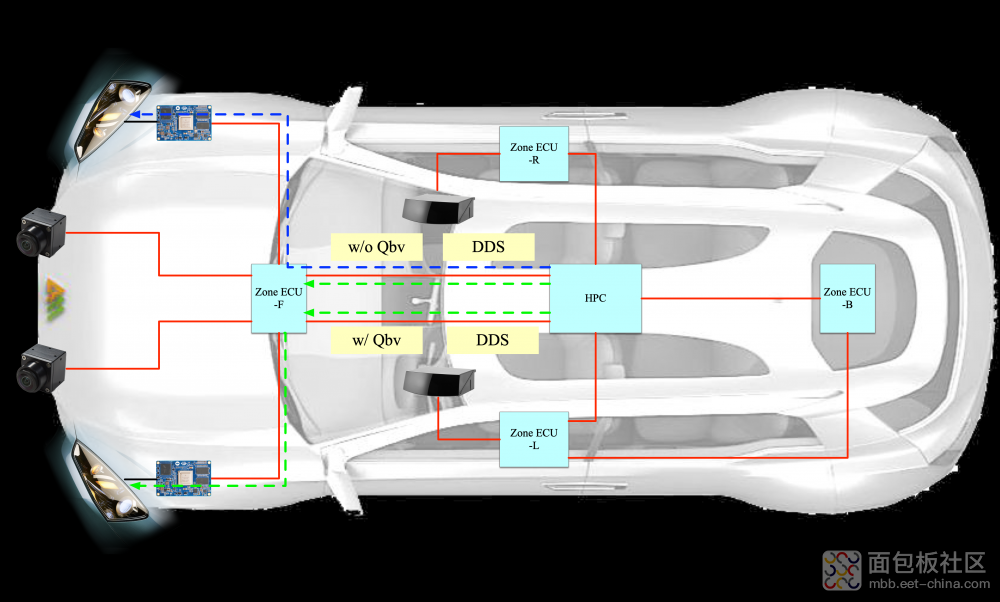
网络通信场景 1——时间同步
--Lidar完成时间同步后,点云数据带有系统时间信息,PC预装的Lidar上位机软件正确显示系统时间
--Camera 完成时间同步后,Display图像正确显示系统时间
--Lidar与Camera的系统时间戳一致
网络通信场景 2——Camera视频流网络传输Qos
--Camera-L视频数据流采用CBS调度;Camera-R视频数据流不采用CBS调度
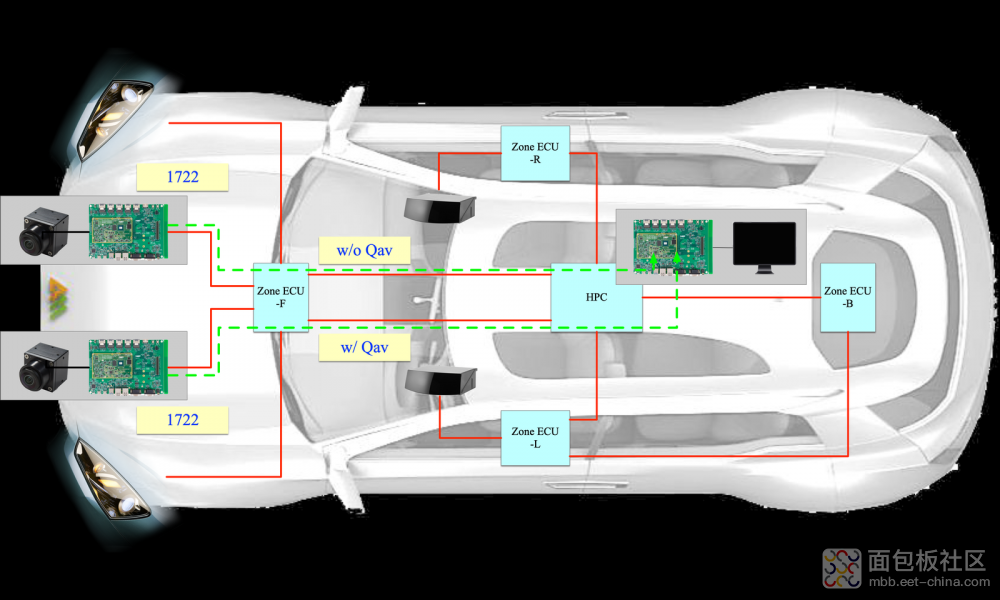
Good Case w/o interference
--Camera视频流传输的网络路径中,增加网络数据流量,使网络数据吞吐量至带宽的100%

观测Display视频图像
--Camera-L的视频图像不受影响,即无卡滞或延迟现象
--Camera-R的视频图像受网络吞吐量影响,即有卡滞与延迟现象
Bad Case w/ interference
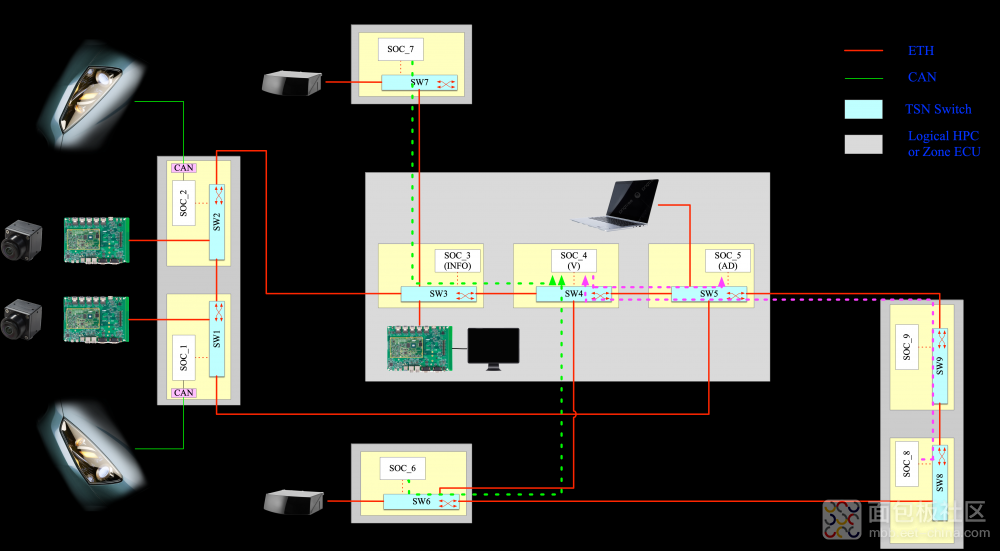
网络通信场景 3——Lidar点云数据网络传输Qos
--Lidar-L点云数据流采用TAS调度
--Lidar-R点云数据流不采用TAS调度
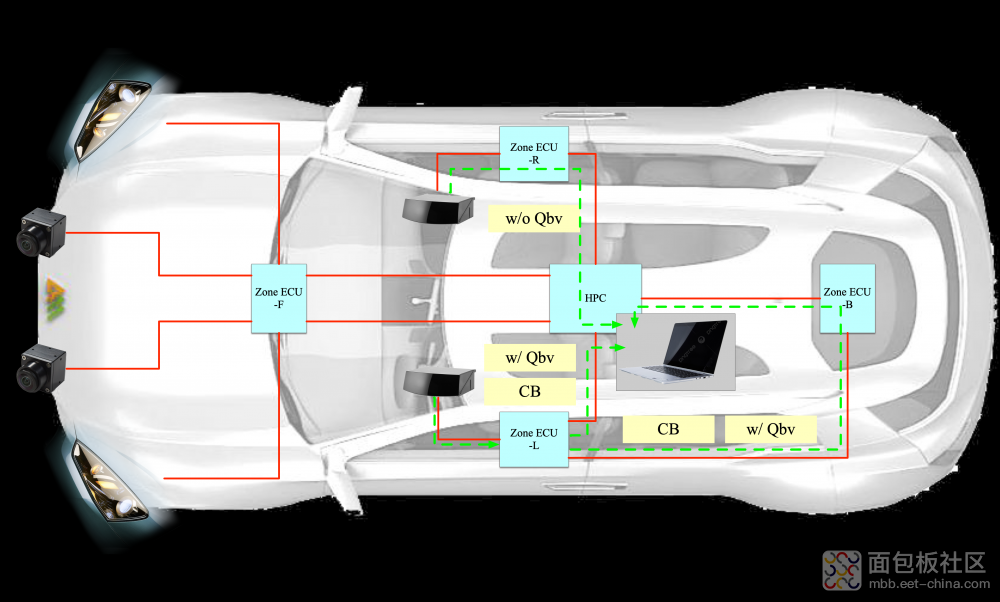
Good Case w/o interference
Lidar点云数据传输的网络路径中,增加网络数据流量,使网络数据吞吐量至带宽的100%
观测PC端点云图像
--Lidar-L的点云图像不受影响
--LIdar-R的点云图像受网络吞吐量影响,出现点云图像闪烁
Bad Case w/ interference
网络通信场景 4——灯光闪烁控制数据流QoS
--Lamp-FL控制数据流采用TAS调度, Lamp-FR控制数据流不采用TAS调度
--HPC分别发送Lamp-FL, Lamp-FR的闪烁控制数据流
观测大灯闪烁情况:Lamp-FL,Lamp-FR同频率闪烁
Good Case w/o interference
--Lamp控制数据流传输的网络路径中,增加网络数据流量,使网络数据吞吐量至带宽的100%
观测大灯闪烁情况:Lamp-FL,Lamp-FR不同频率闪烁
Bad Case w/ interference
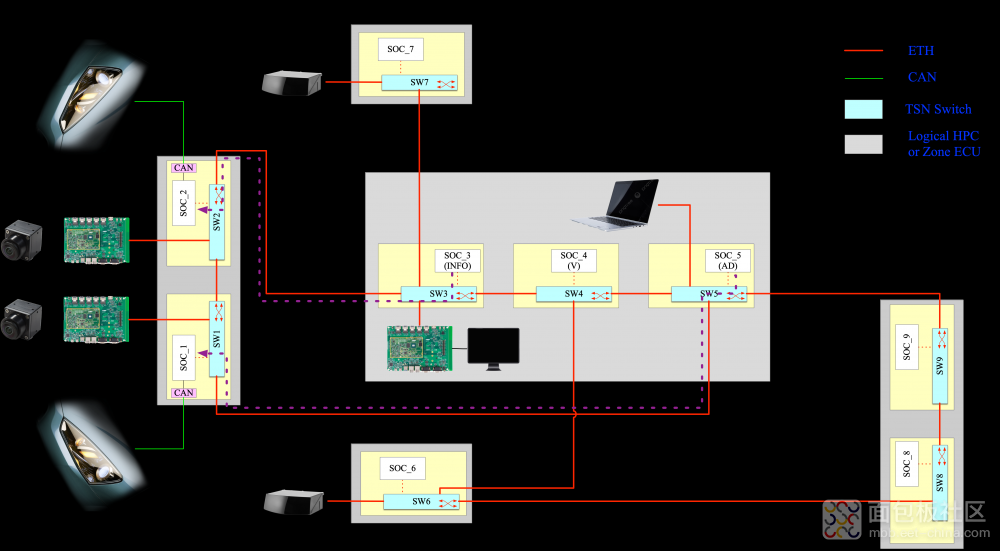
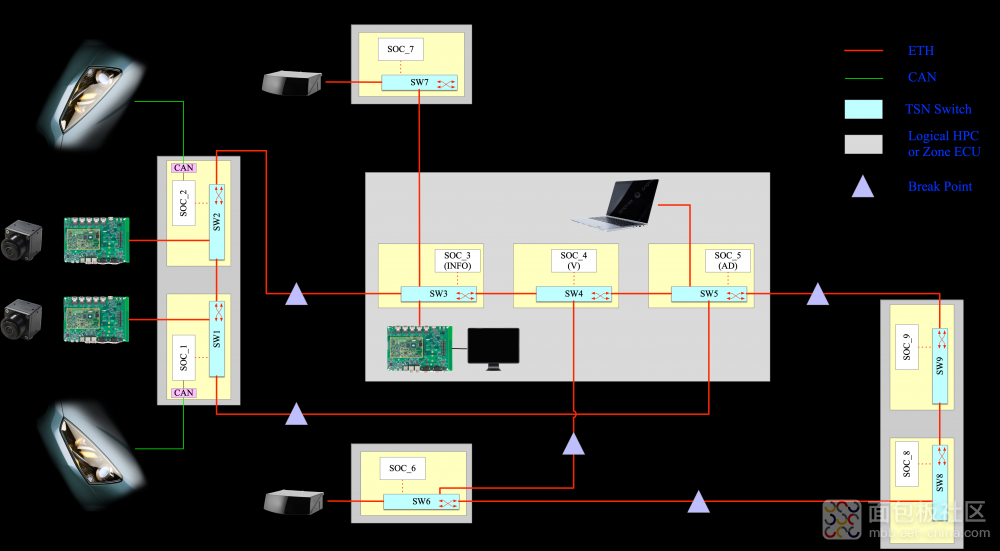
网络通信场景 5——以太网环网
--Lidar-L点云数据流采用环网传输,Lidar-R点云数据流不采用环网传输
--断开环网中的网络物理链路,PC端观测Lidar-L点云图像
--单一网络物理链路故障时,Lidar-L的点云图像不受影响,即不会造成功能失效
总结
经过在多种场景下的实验验证,我们可以发现TSN协议在车载网络应用中具有显著的优势和效果。即使存在大量干扰数据流或链路断开等极端情况下,TSN原型仍能够保持高质量的传输,从而提升了车载系统网络传输的实时性和可靠性。这些实验结果进一步验证了TSN技术在车载网络中的实际应用和性能表现,为未来车载系统的网络通信提供了可靠的技术支撑。
作者: 北汇信息, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3998886.html
版权声明:本文为博主原创,未经本人允许,禁止转载!






 /2
/2 





文章评论(0条评论)
登录后参与讨论