

运用开发板例程中ADC采集程序,用PA1口作为AD输入口,用pt1000电路,读出AD值算出pt1000电阻值,得出温度值,用串口输出。调试阶段为了电阻范围增大,运用电阻箱测试。具体程序如下所示:
/*
* Copyright 2021 MindMotion Microelectronics Co., Ltd.
* All rights reserved.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
#include
#include
#include "board_init.h"
/*
* Definitions.
*/
/*
* Variables.
*/
uint32_t conv_val;
void app_adc_init(void);
volatile bool app_adc_compare_done = false;
const uint16_t PT1000_tab[100]= //温度对应的阻值表格 跨度为0--100°
{//0
10000,10040,10079,10119,10159,10198,10238,10278,10317,10357,
//10
10396,10436,10475,10515,10554,10594,10633,10673,10712,10752,
//20
10791,10831,10870,10910,10949,10988,11028,11067,11107,11146,
//30
11185, 11225,11264,11303,11343,11382,11421,11460, 11500,11539,
//40
11578,11617,11657,11696,11735,11774,11813,11852,11891,11931,
//50
11970,12009,12048,12087,12126,12165,12204,12243,12282,12321,
//60
12360, 12399,12438,12477,12516,12555,12594,12633,12672,12710,
//70
12749,12788,12827,12866,12905,12944,12982,13021,13060,13099,
//80
13137,13176,13215,13254,13292,13331,13370,13408,13447,13488,
//90
13524,13563,13602,13640,13679,13717,13756,13794,13832,13872
};
/*
* Declerations.
*/
/*
* Functions.
*/
uint16_t Temp(void);
int main(void)
{
BOARD_Init();
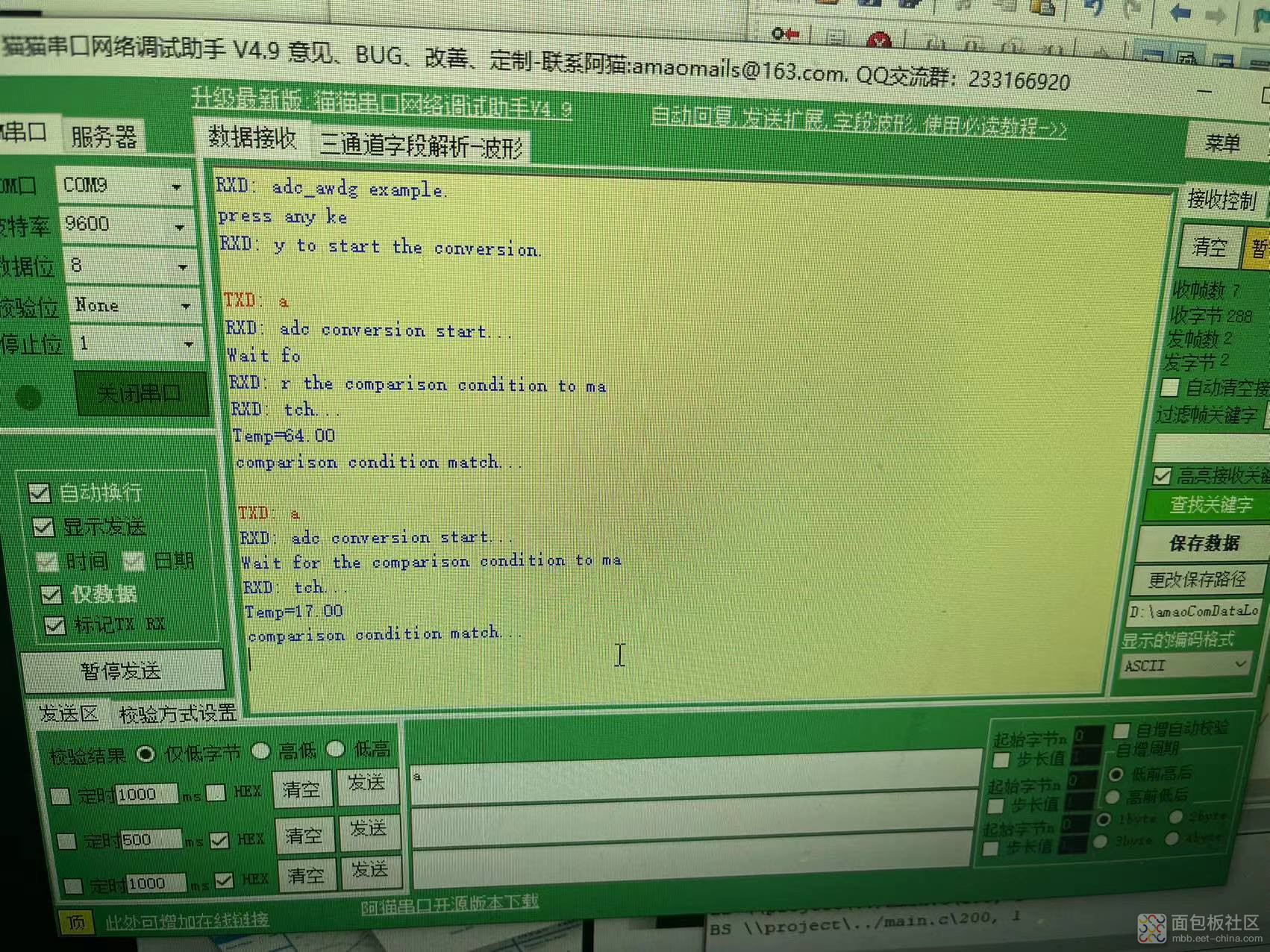
printf("adc_awdg example. \r\n");
/* setup adc with dma. */
app_adc_init();
printf("press any key to start the conversion.\r\n");
while(1)
{
/* type any key into the terminal to trigger the conversion. */
getchar();
/* start the converison. */
printf("adc conversion start...\r\n");
ADC_DoSwTrigger(BOARD_ADC_PORT, true);
printf("Wait for the comparison condition to match...\r\n");
/* wait for the compare match done. */
while (!app_adc_compare_done)
{ }
app_adc_compare_done = false;
// printf("value=%u\n", (unsigned)(conv_val & 0xFFF));
printf("Temp=%.2f\n", (float)(Temp()/100));
printf("comparison condition match...\r\n");
}
}
/* setup the adc converter. */
void app_adc_init(void)
{
/* pins and clock are already in the pin_init.c and clock_init.c. */
/* setup the converter. */
ADC_Init_Type adc_init;
adc_init.Resolution = ADC_Resolution_12b;
adc_init.ClockDiv = ADC_ClockDiv_16;
adc_init.ConvMode = ADC_ConvMode_SeqContinues;
adc_init.Align = ADC_Align_Right;
ADC_Init(BOARD_ADC_PORT, &adc_init);
ADC_Enable(BOARD_ADC_PORT, true); /* power on the converter. */
/* setup one regular channel. */
ADC_RegSeqConf_Type regseq_conf;
regseq_conf.SeqSlots = 1u << BOARD_ADC_HW_COMP_CHN_NUM;
regseq_conf.SeqDirection = ADC_RegSeqDirection_LowFirst;
ADC_EnableRegSeq(BOARD_ADC_PORT, ®seq_conf);
/* set channel sample time. */
ADC_SetChnSampleTime(BOARD_ADC_PORT, BOARD_ADC_HW_COMP_CHN_NUM, ADC_SampleTime_Alt7);
/* setup hardware compare. the conversion would be pompt when the conv value is out of windows. */
ADC_HwCompConf_Type comp_init;
comp_init.ChnNum = BOARD_ADC_HW_COMP_CHN_NUM;
comp_init.HighLimit = BOARD_ADC_HW_COMP_HIGH_LIMIT;
comp_init.LowLimit = BOARD_ADC_HW_COMP_LOW_LIMIT;
ADC_EnableHwComp(BOARD_ADC_PORT, &comp_init);
/* enable windows compare interrupt. */
ADC_EnableInterrupts(BOARD_ADC_PORT, ADC_INT_COMPARE_DONE, true);
NVIC_EnableIRQ(BOARD_ADC_IRQn);
}
/* entry to adc compare done interrupt. */
void BOARD_ADC_IRQHandler(void)
{
uint32_t conv_flags;
uint32_t adc_channel; /* keep the actual hardware conversion channel number. */
uint32_t flags = ADC_GetStatus(BOARD_ADC_PORT);
if ( 0u != (flags & ADC_STATUS_COMPARE_DONE) )
{
app_adc_compare_done = true;
conv_val = ADC_GetConvResult(BOARD_ADC_PORT, &adc_channel, &conv_flags);
}
ADC_ClearStatus(BOARD_ADC_PORT, flags);
}
float AppAdcColTemp(void)
{
float Vout,Vpt,Rx;
Vout = (float)(conv_val*(3300.0f/4096.0f)); //AD值
Vpt = Vout*1690.0f/56000.0f; //VPT_A
Rx = ((300.0f+Vpt)*9090.0f/(3000.0f-Vpt));//100.0f是补偿
return Rx;
}
uint16_t PT1000_Temp(float rtn)
{
uint16_t index=0; //索引值
uint16_t seg=0; //横轴差
uint16_t temp=0; //温度值
if(rtn<10000) //0度时t=10000
{
rtn=10000;
}
else if( rtn >13872) //99度时t=13872
{
rtn=13872;
}
index = (rtn-10000)/39;//(13872-10000)/100=38.72大致求出指针范围
if(index > 99) //限制指针范围index =99指最后一项
{
index = 99;
}
do{
if(rtn>=PT1000_tab[index]&&rtn<=PT1000_tab[index+1])
{
break;
}
else if(rtn { if(index >0 ) { index--; continue; } else { break; } } else if(rtn>PT1000_tab[index+1]) { if(index < 99 ) { index++; continue; } else { break; } } }while(1); seg = PT1000_tab[index+1]-PT1000_tab[index]; //横坐标 temp =(index)*10+(uint8_t)((((rtn-PT1000_tab[index])*1)/seg)*10);//每隔1°求值故乘以 1 return temp; } uint16_t Temp(void) { uint16_t u16Temp;//温度值 float Rx; Rx = AppAdcColTemp()*10; // TRx = Rx*10; u16Temp = PT1000_Temp(Rx)*10; return u16Temp; } /* EOF. */
作者: cxytj, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-4026976.html
版权声明:本文为博主原创,未经本人允许,禁止转载!


 /5
/5 






文章评论(0条评论)
登录后参与讨论