
1、基础环境配置请参考:https://mbb.eet-china.com/blog/4102756-463503.html
2、rtthread-nano使用3.1.5版本链接 :https://github.com/RT-Thread/rtthread-nano/tree/v3.1.5
3、cmbacktrace链接:https://github.com/armink/CmBacktrace.git
4、移植目录:基于uart例程,如下图所示所有用到的文件添加进入,头文件自行添加

5、board修改:
/*
* Copyright (c) 2006-2019, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-05-24 the first version
*/
#include <rthw.h>
#include <rtthread.h>
#include <stdio.h>
#include "fr30xx.h"
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
/*
* Please modify RT_HEAP_SIZE if you enable RT_USING_HEAP
* the RT_HEAP_SIZE max value = (sram size - ZI size), 1024 means 1024 bytes
*/
#define RT_HEAP_SIZE (20*1024)
static rt_uint8_t rt_heap[RT_HEAP_SIZE];
RT_WEAK void *rt_heap_begin_get(void)
{
return rt_heap;
}
RT_WEAK void *rt_heap_end_get(void)
{
return rt_heap + RT_HEAP_SIZE;
}
#endif
void SysTick_Handler(void)
{
rt_interrupt_enter();
rt_tick_increase();
rt_interrupt_leave();
}
/**
* This function will initial your board.
*/
void rt_hw_board_init(void)
{
void main_entry_point(void);
int board_init(void);
main_entry_point();
board_init();
SysTick_Config(system_get_CORE_HSCLK() / RT_TICK_PER_SECOND);
NVIC_EnableIRQ(SysTick_IRQn);
/*
* 1: OS Tick Configuration
* Enable the hardware timer and call the rt_os_tick_callback function
* periodically with the frequency RT_TICK_PER_SECOND.
*/
// HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/RT_TICK_PER_SECOND);
/* Call components board initial (use INIT_BOARD_EXPORT()) */
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
#endif
}
6、屏蔽system_fr30xx.c中的这段代码:rtthread也使用这个规则,把main_entry_point放到rt_hw_board_init调用即可
extern int $Super$$main(void);
int $Sub$$main(void)
{
main_entry_point();
$Super$$main();
return 0;
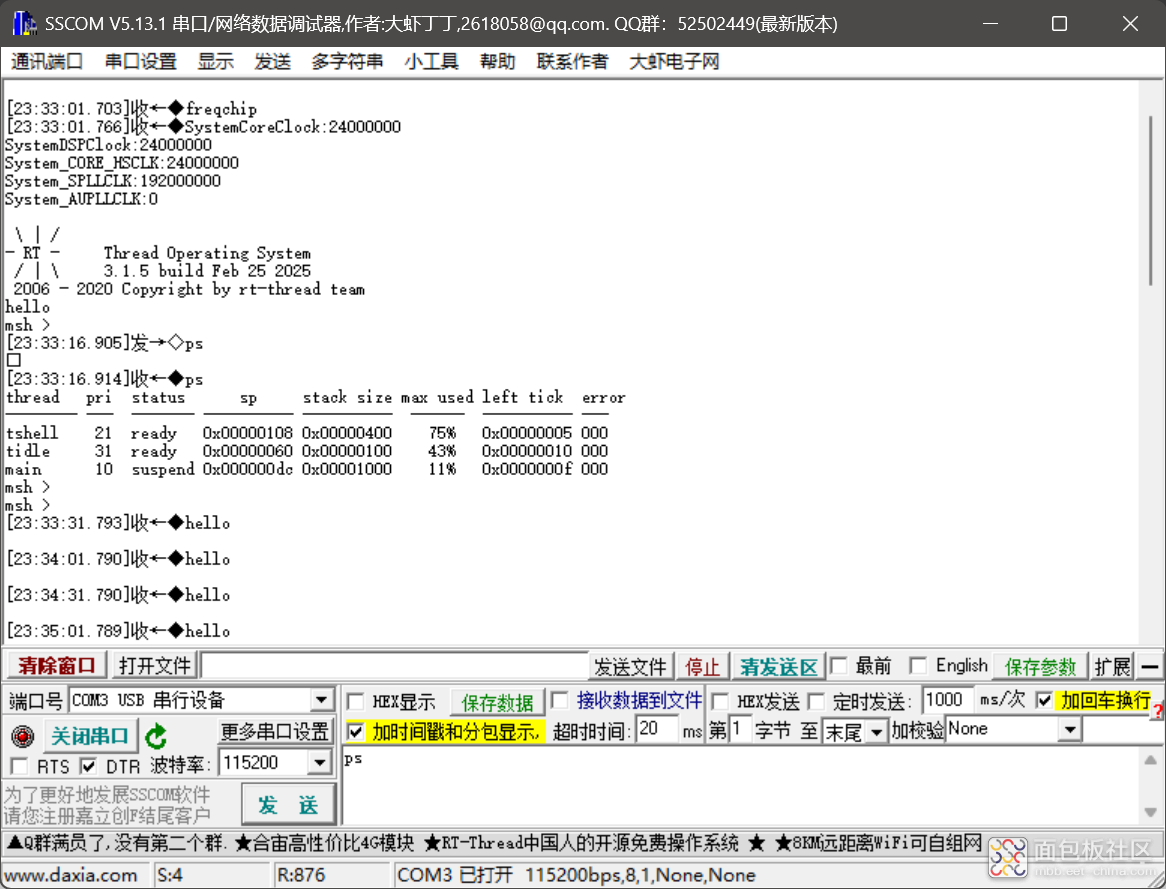
}7、main.c修改:实现了简单的main里间隔30s打印下hello,使用中断接收缓冲区接收串口发的数据,实现了一个测试函数,发指令“CMD_TEST”
/*
******************************************************************************
* @file main.c
* @author FreqChip Firmware Team
* @brief main source File.
******************************************************************************
* @attention
*
* Copyright (c) 2023 FreqChip.
* All rights reserved.
******************************************************************************
*/
#include "uart_demo.h"
#include "rtthread.h"
#include "cm_backtrace.h"
#ifdef RT_USING_FINSH
uint16_t head_ptr = 0;
uint16_t tail_ptr = 0;
uint8_t data_buf[128] = { 0 };
uint8_t data_one = 0;
#endif
UART_HandleTypeDef Uart3_handle;
int fputc(int ch, FILE *stream)
{
while(__UART_IS_TxFIFO_FULL(UART3));
__UART_WRITE_FIFO(UART3, ch);
return ch;
}
/*********************************************************************
* @fn system_clock_config
*
* @brief System Misc Init.
*/
void system_clock_config(void)
{
System_ClkConfig_t ClkConfig;
/* CORE HSCLK Config */
ClkConfig.CORE_HSCLK_CFG.CORE_HSCLK_Source = CORE_HSCLK_SEL_HES;
/* PLL clock = HSE_VALUE*N + (HSE_VALUE/65535)*M */
/* SPLL CLK Config */
ClkConfig.SPLL_CFG.PowerEn = PLL_POWER_ENABLE;
ClkConfig.SPLL_CFG.PLL_N = 8;
ClkConfig.SPLL_CFG.PLL_M = 0;
/* PLL clock = HSE_VALUE*N + (HSE_VALUE/65535)*M */
/* AUPLL CLK Config */
ClkConfig.AUPLL_CFG.PowerEn = PLL_POWER_DISABLE;
ClkConfig.AUPLL_CFG.PLL_N = 8;
ClkConfig.AUPLL_CFG.PLL_D = 0;
ClkConfig.AUPLL_CFG.PLL_K = 0;
System_CORE_HSCLK_config(&ClkConfig.CORE_HSCLK_CFG);
if (System_SPLL_config(&ClkConfig.SPLL_CFG,200) == -1)
while(1);
if (System_AUPLL_config(&ClkConfig.AUPLL_CFG,200) == -1)
while(1);
ClkConfig.MCU_Clock_Source = MCU_CLK_SEL_CORE_HSCLK;
ClkConfig.SOC_DIV = 1; /* This parameter is valid when MCU_Clock_Source == MCU_CLK_SEL_SPLL_CLK */
ClkConfig.MCU_DIV = 1;
ClkConfig.APB0_DIV = 1;
ClkConfig.APB1_DIV = 1;
ClkConfig.APB2_DIV = 1;
System_MCU_clock_Config(&ClkConfig);
}
int board_init(void)
{
GPIO_InitTypeDef GPIO_Handle;
pmu_init();
system_clock_config();
/* Uart3 IO init */
GPIO_Handle.Pin = GPIO_PIN_4|GPIO_PIN_5;
GPIO_Handle.Mode = GPIO_MODE_AF_PP;
GPIO_Handle.Pull = GPIO_PULLUP;
GPIO_Handle.Alternate = GPIO_FUNCTION_1;
gpio_init(GPIOB, &GPIO_Handle);
__SYSTEM_UART_CLK_SELECT_COREH();
Uart3_handle.UARTx = UART3;
Uart3_handle.Init.BaudRate = 115200;
Uart3_handle.Init.DataLength = UART_DATA_LENGTH_8BIT;
Uart3_handle.Init.StopBits = UART_STOPBITS_1;
Uart3_handle.Init.Parity = UART_PARITY_NONE;
Uart3_handle.Init.FIFO_Mode = UART_FIFO_ENABLE;
uart_init(&Uart3_handle);
#ifdef RT_USING_FINSH
NVIC_EnableIRQ(UART3_IRQn);
NVIC_SetPriority(UART3_IRQn, 0);
uart_receive_IT(&Uart3_handle, &data_one, 1);
#endif
printf("SystemCoreClock:%d\r\n", system_get_CoreClock());
printf("SystemDSPClock:%d\r\n", system_get_DSPClock());
printf("System_CORE_HSCLK:%d\r\n", system_get_CORE_HSCLK());
printf("System_SPLLCLK:%d\r\n", system_get_SPLLCLK());
printf("System_AUPLLCLK:%d\r\n", system_get_AUPLLCLK());
cm_backtrace_init("Project", "V1.1.0", "V1.1.0");
return 0;
}
int main(void)
{
while (1)
{
printf("hello\r\n");
rt_thread_mdelay(30000);
}
}
#ifdef RT_USING_CONSOLE
void rt_hw_console_output(const char *str)
{
rt_size_t i = 0, size = 0;
char a = '\r';
size = rt_strlen(str);
for (i = 0; i < size; i++)
{
if (*(str + i) == '\n')
{
printf("%c", a);
}
printf("%c", *(str + i));
}
}
#endif
#ifdef RT_USING_FINSH
void TEST_CMD(int argc, char **argv)
{
printf("argc %d\r\n", argc);
}
MSH_CMD_EXPORT(TEST_CMD, test_cmd);
void uart3_irq(void)
{
uart_IRQHandler(&Uart3_handle);
data_buf[head_ptr++] = data_one;
head_ptr %= 128;
uart_receive_IT(&Uart3_handle, &data_one, 1);
}
char rt_hw_console_getchar(void)
{
/* Note: the initial value of ch must < 0 */
int ch = -1;
if (head_ptr != tail_ptr)
{
ch = data_buf[tail_ptr];
tail_ptr++;
tail_ptr %= 128;
}
else
{
rt_thread_mdelay(10);
}
return ch;
}
#endif
8、main线程的栈开大一点:如下是rtconfig.h
/* RT-Thread config file */
#ifndef __RTTHREAD_CFG_H__
#define __RTTHREAD_CFG_H__
// <<< Use Configuration Wizard in Context Menu >>>
// <h>Basic Configuration
// <o>Maximal level of thread priority <8-256>
// <i>Default: 32
#define RT_THREAD_PRIORITY_MAX 32
// <o>OS tick per second
// <i>Default: 1000 (1ms)
#define RT_TICK_PER_SECOND 1000
// <o>Alignment size for CPU architecture data access
// <i>Default: 4
#define RT_ALIGN_SIZE 4
// <o>the max length of object name<2-16>
// <i>Default: 8
#define RT_NAME_MAX 8
// <c1>Using RT-Thread components initialization
// <i>Using RT-Thread components initialization
#define RT_USING_COMPONENTS_INIT
// </c>
#define RT_USING_USER_MAIN
// <o>the stack size of main thread<1-4086>
// <i>Default: 512
#define RT_MAIN_THREAD_STACK_SIZE 4096
// </h>
// <h>Debug Configuration
// <c1>enable kernel debug configuration
// <i>Default: enable kernel debug configuration
//#define RT_DEBUG
// </c>
// <o>enable components initialization debug configuration<0-1>
// <i>Default: 0
#define RT_DEBUG_INIT 0
// <c1>thread stack over flow detect
// <i> Diable Thread stack over flow detect
//#define RT_USING_OVERFLOW_CHECK
// </c>
// </h>
// <h>Hook Configuration
// <c1>using hook
// <i>using hook
//#define RT_USING_HOOK
// </c>
// <c1>using idle hook
// <i>using idle hook
//#define RT_USING_IDLE_HOOK
// </c>
// </h>
// <e>Software timers Configuration
// <i> Enables user timers
#define RT_USING_TIMER_SOFT 0
#if RT_USING_TIMER_SOFT == 0
#undef RT_USING_TIMER_SOFT
#endif
// <o>The priority level of timer thread <0-31>
// <i>Default: 4
#define RT_TIMER_THREAD_PRIO 4
// <o>The stack size of timer thread <0-8192>
// <i>Default: 512
#define RT_TIMER_THREAD_STACK_SIZE 512
// </e>
// <h>IPC(Inter-process communication) Configuration
// <c1>Using Semaphore
// <i>Using Semaphore
#define RT_USING_SEMAPHORE
// </c>
// <c1>Using Mutex
// <i>Using Mutex
//#define RT_USING_MUTEX
// </c>
// <c1>Using Event
// <i>Using Event
//#define RT_USING_EVENT
// </c>
// <c1>Using MailBox
// <i>Using MailBox
#define RT_USING_MAILBOX
// </c>
// <c1>Using Message Queue
// <i>Using Message Queue
//#define RT_USING_MESSAGEQUEUE
// </c>
// </h>
// <h>Memory Management Configuration
// <c1>Memory Pool Management
// <i>Memory Pool Management
//#define RT_USING_MEMPOOL
// </c>
// <c1>Dynamic Heap Management(Algorithm: small memory )
// <i>Dynamic Heap Management
#define RT_USING_HEAP
#define RT_USING_SMALL_MEM
// </c>
// <c1>using tiny size of memory
// <i>using tiny size of memory
//#define RT_USING_TINY_SIZE
// </c>
// </h>
// <h>Console Configuration
// <c1>Using console
// <i>Using console
#define RT_USING_CONSOLE
// </c>
// <o>the buffer size of console <1-1024>
// <i>the buffer size of console
// <i>Default: 128 (128Byte)
#define RT_CONSOLEBUF_SIZE 256
// </h>
// <h>FinSH Configuration
// <c1>include finsh config
// <i>Select this choice if you using FinSH
#include "finsh_config.h"
// </c>
// </h>
// <h>Device Configuration
// <c1>using device framework
// <i>using device framework
//#define RT_USING_DEVICE
// </c>
// </h>
// <<< end of configuration section >>>
#endif9、效果展示:
10、cmbacktrace只需要修改cmb_cfg.h:
/*
* This file is part of the CmBacktrace Library.
*
* Copyright (c) 2016, Armink, <armink.ztl@gmail.com>
*
* Permission is hereby granted, free of charge, to any person obtaining
* a copy of this software and associated documentation files (the
* 'Software'), to deal in the Software without restriction, including
* without limitation the rights to use, copy, modify, merge, publish,
* distribute, sublicense, and/or sell copies of the Software, and to
* permit persons to whom the Software is furnished to do so, subject to
* the following conditions:
*
* The above copyright notice and this permission notice shall be
* included in all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED 'AS IS', WITHOUT WARRANTY OF ANY KIND,
* EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF
* MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT.
* IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY
* CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT,
* TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE
* SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
*
* Function: It is the configure head file for this library.
* Created on: 2016-12-15
*/
#ifndef _CMB_CFG_H_
#define _CMB_CFG_H_
#include "rtthread.h"
/* print line, must config by user */
#define cmb_println(...) rt_kprintf(__VA_ARGS__);rt_kprintf("\r\n")/* e.g., printf(__VA_ARGS__);printf("\r\n") or SEGGER_RTT_printf(0, __VA_ARGS__);SEGGER_RTT_WriteString(0, "\r\n") */
/* enable bare metal(no OS) platform */
/* #define CMB_USING_BARE_METAL_PLATFORM */
/* enable OS platform */
#define CMB_USING_OS_PLATFORM
/* #define CMB_USING_OS_PLATFORM */
/* OS platform type, must config when CMB_USING_OS_PLATFORM is enable */
#define CMB_OS_PLATFORM_TYPE CMB_OS_PLATFORM_RTT/* #define CMB_OS_PLATFORM_TYPE CMB_OS_PLATFORM_RTT or CMB_OS_PLATFORM_UCOSII or CMB_OS_PLATFORM_UCOSIII or CMB_OS_PLATFORM_FREERTOS or CMB_OS_PLATFORM_RTX5 */
/* cpu platform type, must config by user */
#define CMB_CPU_PLATFORM_TYPE CMB_CPU_ARM_CORTEX_M4/* CMB_CPU_ARM_CORTEX_M0 or CMB_CPU_ARM_CORTEX_M3 or CMB_CPU_ARM_CORTEX_M4 or CMB_CPU_ARM_CORTEX_M7 */
/* enable dump stack information */
/* #define CMB_USING_DUMP_STACK_INFO */
/* language of print information */
#define CMB_PRINT_LANGUAGE CMB_PRINT_LANGUAGE_ENGLISH/* #define CMB_PRINT_LANGUAGE CMB_PRINT_LANGUAGE_ENGLISH(default) or CMB_PRINT_LANGUAGE_CHINESE */
#endif /* _CMB_CFG_H_ */
作者: 小憩一隅, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-4102756.html
版权声明:本文为博主原创,未经本人允许,禁止转载!



 /5
/5 





文章评论(0条评论)
登录后参与讨论