
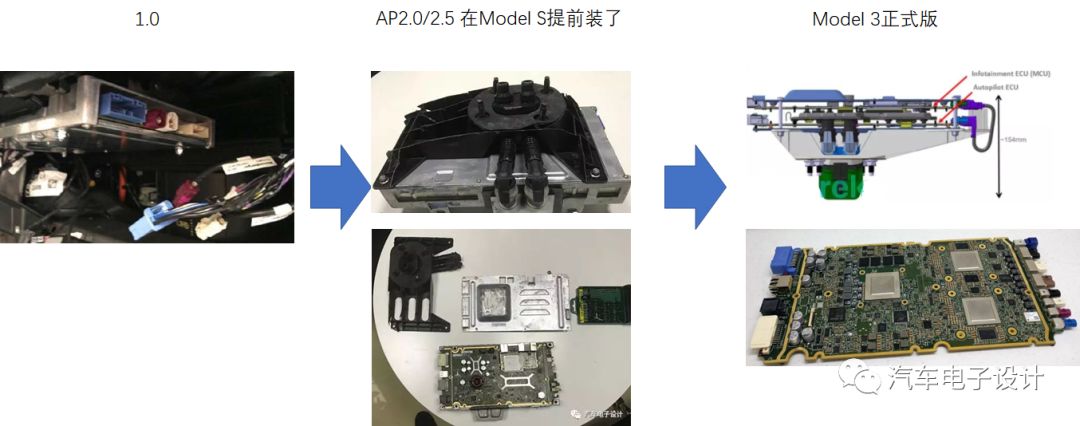
去年10月份的时候,超哥的Tesla的P2.5然后分了两篇文章写,
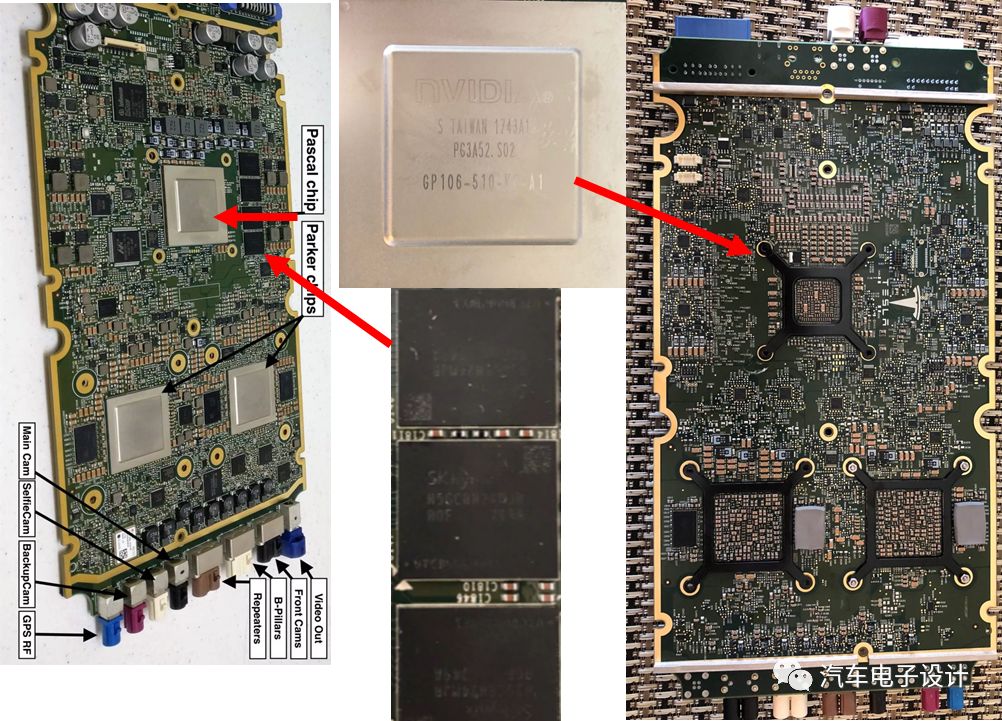
从这个基准来看,确实像这两篇文章所说的,实际量产的产品在这个基础上是迭代的。 AP2.5正反面一共有两块板,正面是一块Parker的自动驾驶控制板,反面是基于Intel芯片加上SPC5748G MCU
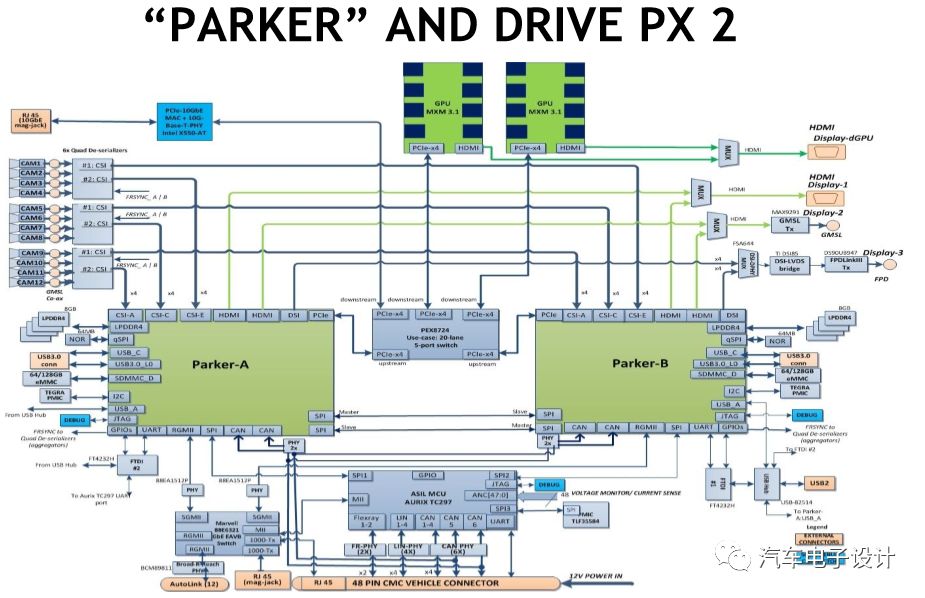
Autopilot板子:这块板子具体的还需要仔细学习一下,主要是要核对一下这个板子和NV之前的一些参考有多大的差异,基本如超哥之间分析的那样两颗NVIDIA “PARKER” +NVIDIA GP106-510-KC的芯片,与整车交互的是INFINEON TriCore AUTRIX TC297TX-128 MCU
根据板载的输入信号来看,这一半就是视频处理器
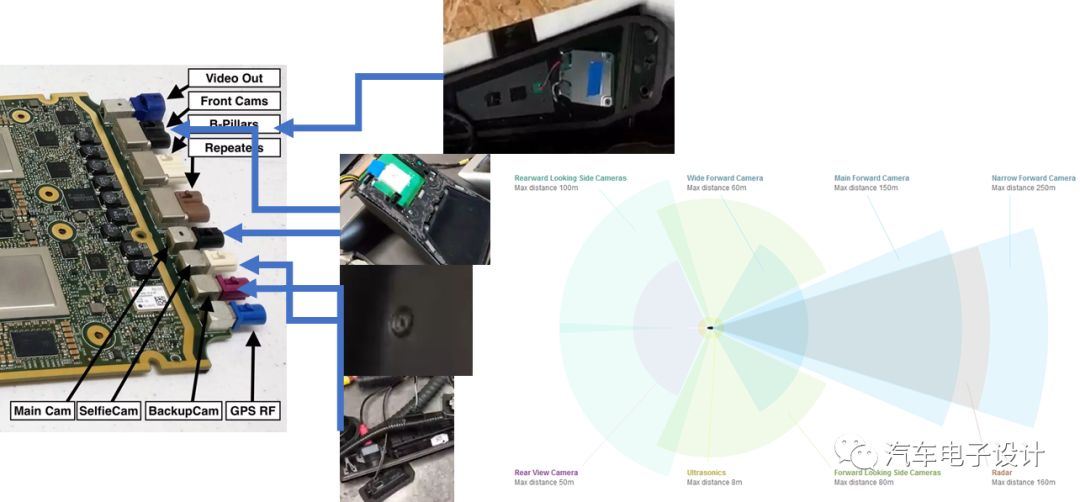
这边是偏向于传统的控制器,主要是基于Tri-core的传统交互和运行部分

内部很多设计,有些跟不上节奏,需要做一轮基于这类视频处理的硬件方面的对比学习^_^
两块电路板之间没有物理连接在单元内部,共用了水冷散热部分,整合到同一个金属外壳之中,在这个里面,设计到ECU的冷热管理在未来也比较有趣



 /5
/5 







文章评论(0条评论)
登录后参与讨论