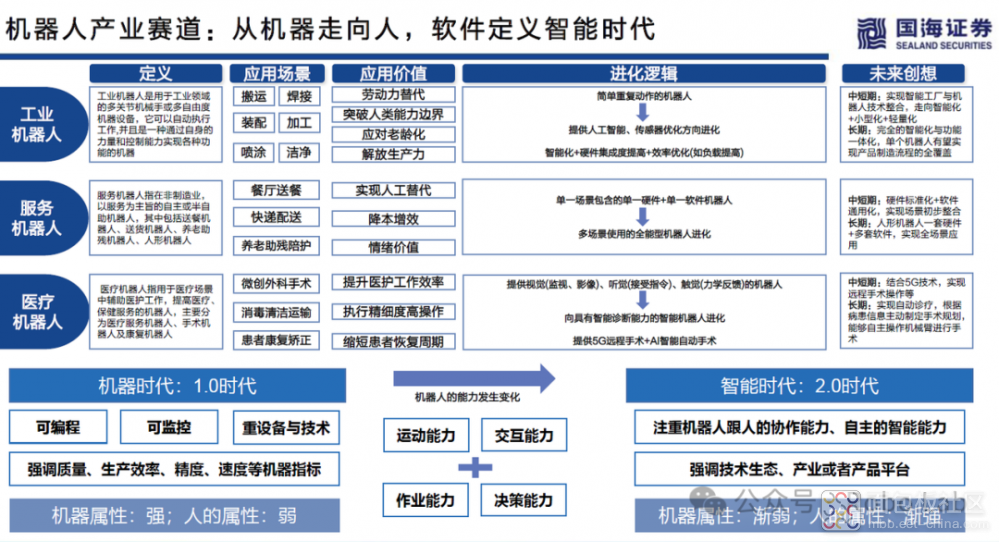
机器人革命:下一个工业帝国将由谁定义? 摘 要 工业机器人是机器人产业的最大子赛道,占据全球及中国市场主导地位。2021年全球市场中工业机器人占比43%,中国市场占比53%。工业机器人主要用于搬运、焊接、喷涂等生产场景。 当前工业机器人正从效率工具向智能中枢升级,全球工业机器人市场从粗放式扩张转向技术密集型发展,2018-2022年市场规模波动增长,2024-2028年预计年均增速8.2%。中国市场份额持续增长,主导地位强化。搬运机器人是中国工业机器人市场最大需求,占比55%。未来三年,工业机器人应用将从单点替代向全流程智能化加速演进。 全球机器人市场结构分析 根据应用场景划分,机器人产业分为工业、服务与特种机器人三大类。国际机器人联盟(IFR)采用二分法(工业/服务机器人),而中国电子学会基于本土产业特征增设特种机器人类别,形成三类分类体系。数据显示,2021年全球市场中工业机器人占比43%,服务机器人37%,特种机器人20%;中国市场结构呈现差异化特征:工业机器人占比53%(全球43%),服务机器人36%(持平全球),特种机器人仅占11%(全球20%)。 工业机器人以搬运、焊接、喷涂等生产场景为主,占据全球及中国市场主导地位。服务机器人涵盖家用、医疗、公共服务领域,占比结构国内外基本一致。特种机器人(含救援、军用等)在海外市场发展较快,国内占比不足全球均值六成,显示该领域存在较大增长空间。当前分类体系与市场占比差异,反映了各国产业政策与技术路线的战略侧重。 工业机器人:从效率工具到智能中枢 当前工业机器人聚焦搬运、焊接、装配等场景,核心价值在于劳动力替代与制造精度突破(如±0.1mm级定位)。技术进化分为两阶段:中短期通过传感器优化与小型化设计(如负载提升至500kg级),实现智能工厂多机协同;长期目标依赖边缘计算与自主决策算法,构建动态生产优化系统。特斯拉Optimus已验证人形机器人在复杂产线中的协同潜力,未来单个机器人有望覆盖全制造流程。 服务机器人:场景融合与情感计算突破 服务机器人现以送餐、配送、养老助残等单一功能设备为主,技术瓶颈在于场景泛化能力。进化路径需分步突破:中短期通过硬件模块化(如可替换机械臂)与软件通用化降低开发成本,实现家庭、商业等场景初步整合;长期目标需结合情感计算(如小米CyberOne的情绪反馈系统)与多模态交互框架,构建“单硬件+多软件”架构。人形机器人将成为服务场景终极载体,需同步完善伦理约束与隐私保护机制。 医疗机器人:精准诊疗的技术革命 医疗机器人通过力学反馈与影像导航技术,在微创手术、康复矫正领域实现临床突破。短期技术重点为5G远程操作(如跨院手术协同)与AI术前规划,达芬奇手术机器人已实现±0.1mm级操作精度;长期将开发自主手术系统,结合病理数据库与实时影像分析,完成从“医生操作延伸”到“智能诊疗主体”的跨越。2023年临床试验显示,AI辅助手术规划可使并发症发生率降低22%。 机器人代际跃迁 机器人产业正经历从1.0机器时代向2.0智能时代的系统性升级。 第一阶段(1.0时代) 1.0时代依赖预设程序执行固定任务,以可编程控制、设备状态监控与重型机械结构为特征,核心目标聚焦于提升制造质量、作业效率与操作精度等传统机械指标,本质仍属于刚性生产工具范畴。 第二阶段(2.0时代) 通过“基础作业+实时决策”的双层架构实现动态响应,通过运动控制算法、环境交互系统与自主决策模块的突破,赋予机器人动态响应能力,其技术重心转向人机协作效率提升与智能泛化能力构建,逐步强化类人属性。 代际升级的核心在于功能架构的革新,这一转变推动机器人技术基础从依赖硬件性能转向以算法为核心——运动系统通过强化学习实现复杂地形自适应,交互系统融合视觉、力觉、语音等多维度感知数据,语义理解引擎则支撑非结构化指令响应。 当前产业处于过渡阶段,机器人正从单一执行工具演变为具备环境认知的半自主实体。数据显示,自主决策模块在工业场景的渗透率预计于3-5年内突破40%,标志着机器人从辅助生产设备向智能生产系统的核心组件转型。 全球工业机器人市场从粗放式扩张转 向技术密集型发展 全球工业机器人市场结构性升级 2018年市场规模为78.1亿美元,2019年增长至90.1亿美元,2020年受全球经济波动影响骤降至55.4亿美元,2018-2020年复合增长率仍保持7.79%。2021年市场快速恢复至84.0亿美元,2022年达92.8亿美元,预计2023年突破百亿(104.7亿美元)。未来增长斜率趋稳,2024-2028年市场规模预计从117.2亿美元攀升至165.4亿美元,年均增速8.2%。 数据来源:Statista,国海证券研究所 数据表明,工业机器人产业已跨越短期冲击,在智能制造升级驱动下进入持续扩张周期,技术创新与自动化需求将成为核心增长引擎。 数据显示,2004-2020年全球工业机器人安装量年均增速8.98%,2021-2024年预计回落至5.99%,但绝对增量仍保持上升趋势(2024年达518千台)。结合市场规模数据(2018-2023年CAGR 7.79%,2024-2028年预计8.2%),可发现安装量增速趋缓与市场规模持续扩张的背离现象。 数据来源:Statista,国海证券研究所 这反映产业正经历结构性升级:早期以数量扩张驱动增长,当前阶段转向高附加值产品渗透。技术迭代(如协作机器人占比提升至15%)与场景拓展(新能源汽车产线自动化率超60%)成为新增长引擎,单位机器人产值提升抵消数量增速下降影响。市场正从粗放式扩张转向技术密集型发展阶段。 2018-2022年数据显示,中国工业机器人销售额占比从36.7%持续攀升至44.0%,年均提升1.8个百分点,主导地位持续强化。同期,日本、美国等传统工业国占比稳定在5%-10%区间,德国份额由9.1%降至5.6%。 中国市场份额增长与全球总量扩张形成双重驱动 Statista数据显示,2012-2022年亚洲/澳大利亚地区主导全球工业机器人部署,安装量从15万台增至40.5万台,占全球总量比重从53%升至72%。2021年该区域安装量达峰值40.5万台,占当年全球总增量84%,主要受中国(贡献65%)、日本(19%)、韩国(11%)驱动。新能源汽车产线自动化率提升至75%、3C电子产业机器人密度突破400台/万人,构成核心增长动力。 欧洲市场呈现波动性增长,2021年安装量8.4万台,2022年降至5.6万台,德国、意大利等传统工业国受能源成本上升影响,汽车制造业机器人投资缩减12%。美洲市场增长平缓,2022年安装量5.6万台,美国通过制造业回流政策推动机器人部署,汽车与航空航天领域年复合增长率达9%,但拉美地区基础设施滞后制约整体增速。 数据来源:Statista 区域分化反映产业升级路径差异:亚洲通过规模化应用与技术迭代形成正向循环,欧洲受制于传统产业转型压力,美洲则呈现结构性失衡。尽管2022年全球经济波动导致亚洲安装量回调至35万台,其主导地位仍稳固,预计2025年占比将突破75%。该格局印证工业机器人发展重心持续向亚太制造业集群迁移。 数据来源:Statista,国海证券研究所 对比全球市场规模数据(2018年78.1亿美元→2022年92.8亿美元),中国市场份额增长与全球总量扩张形成双重驱动:中国市场规模5年间从28.6亿美元增至40.8亿美元,复合增速达9.3%,高于全球平均的4.5%。 这一分化反映中国智能制造升级的战略成效——新能源汽车、3C电子等产业自动化需求激增,叠加本土供应链完善,推动中国从“最大市场”向“技术迭代中心”演进。当前中国每万名工人机器人密度较发达国家仍有3倍差距,预示持续增长潜力。 搬运机器人成为中国工业机器人市场最大需求 2021年中国工业机器人市场呈现出显著的应用领域分化特征,六大核心场景中搬运机器人以55%的绝对占比主导市场,焊接(25%)、装配(10%)、加工(5%)、喷涂(3%)及洁净领域(2%)形成差异化竞争格局。这一分布既反映我国制造业自动化升级的阶段性特征,也揭示各领域技术成熟度与市场需求的动态平衡。 搬运机器人:规模效应与技术普惠 作为工业机器人最大应用板块,搬运领域凭借技术门槛低、场景普适性强等优势,在仓储物流、机床上下料等场景快速渗透。 其核心价值体现在三方面:一是AGV/AMR等移动机器人技术突破,实现物料运输路径动态规划;二是大负载搬运设备(>500kg)满足重工业需求,填补高危岗位人力缺口;三是与智能仓储系统深度集成,提升供应链响应效率。2021年新能源汽车、3C电子等行业产能扩张,直接拉动搬运机器人需求激增,预计未来三年仍将维持45%以上的细分市场占比。 AGV搬运机器人技术解析与应用发展 AGV(自动导引运输车)作为搬运机器人的核心类型,通过电磁、光学或卫星导航技术实现自主路径规划,已成为物流仓储与智能制造的关键设备。其技术体系涵盖导引、驱动、供能及控制四大模块,支撑起现代工业的高效物料运输系统。 分类与技术架构 按安装方式可分为地面固定、悬吊、移动式三类,适应不同场景的空间约束。负载能力覆盖1kg至超100kg等级,满足从电子元件到重型机械的多样化需求。导引技术以电磁、磁带、GPS为主流,新兴视觉导航正提升环境适应性;驱动系统通过单轮、差速、双轮及全向设计平衡效率与灵活性;供电体系从铅酸电池向锂电升级,无接触能量传输技术开始替代传统充电模式。 感知技术发展 搬运机器人对立体空间感知有强烈需求。多线激光雷达在搬运机器人产品应用上相比2D激光雷达具有显著优势。它能提供三维环境感知,精准测量物体高度和获取三维点云数据,弥补了2D激光雷达在高度信息获取上的不足。这使搬运机器人在复杂环境(如仓库货架间或有立体障碍物场景)中具备更好的导航和避障能力。亮道智能的3D flash纯固态激光雷达作为先进的多线激光雷达技术,具备高精度探测、低功耗、强抗干扰和环境适应能力,能在室内外复杂场景稳定工作,为AGV实时定位导航避障提供更丰富信息支持。禾赛与速腾也有类似广角激光雷达产品,专门服务于工业机器人。 智能控制与场景渗透 双层控制系统构建决策闭环:上位系统负责多机任务调度与路径优化,下位系统执行导航计算与操作控制。在立体仓储中,AGV集群可将分拣效率提升300%,错误率降至0.05%以下;汽车制造车间通过AGV柔性运输,实现产线重组时间缩短70%。技术优势集中体现在系统可拓展性——单台设备至200台集群均能保持稳定运行,且改造成本较传统传送带降低60%。 技术演进方向 随着5G通信与边缘计算融合,实时动态路径规划精度已达±2cm级。2023年行业数据显示,采用激光SLAM导航的AGV占比突破45%,较2018年提升30个百分点。新能源领域对超重型AGV(负载>1吨)需求年增25%,驱动大扭矩电机与分布式控制技术持续突破。未来三年,智能仓储AGV渗透率预计从38%提升至55%,技术迭代正重塑物料运输生态。 焊接机器人:工艺升级驱动专业化 焊接领域占据四分之一市场份额,技术路径呈现双轨并行特征。点焊机器人聚焦汽车制造领域,凭借0.1mm级重复定位精度,实现车身焊点合格率提升至99.97%;弧焊机器人则在工程机械、金属结构行业加速替代人工,通过焊接速度(>60cm/min)与稳定性优化,将综合成本降低40%。当前制约因素在于复杂曲面焊接适应性不足,未来需结合3D视觉定位与自适应控制算法突破工艺瓶颈。 装配与加工:柔性化制造突破口 装配机器人虽仅占10%份额,却承载着制造业柔性化升级的关键任务。在汽车总装、家电生产线等场景,其核心价值在于多型号产品快速切换能力——通过视觉引导系统与力控夹爪配合,装配节拍误差控制在±0.5s以内。加工机器人则以切割、抛光工艺为主,在航空航天钛合金构件加工中实现表面粗糙度Ra≤0.8μm,较传统机床提升3倍效率。但两领域共同面临自动化水平不足的挑战,现有生产线自动化率不足30%,亟待模块化设计降低部署成本。 喷涂与洁净:技术密集型细分市场 喷涂机器人虽占比仅3%,却集中体现技术壁垒:3D视觉系统实现车身曲面覆盖率>99.5%,旋杯雾化技术使涂料利用率提升至85%,较人工喷涂节约材料成本25%。洁净机器人则在医疗设备、精密电子领域构建技术护城河,通过FFU过滤系统维持百级洁净环境,运动机构粒子释放量控制在5个/ft³以下。这两领域虽市场规模有限,但利润率高达35%-40%,成为技术先导型企业重点布局方向。 当前市场格局遵循“规模优先、技术迭代”的双轨逻辑:搬运、焊接等大规模应用领域通过技术普惠实现市场扩容,而喷涂、洁净等专业场景依赖技术创新构建竞争壁垒。未来三年技术攻坚将聚焦三大方向:一是多模态感知系统集成(视觉/力觉/位觉),提升复杂环境适应能力;二是模块化架构设计,降低非标场景改造成本;三是工艺数据库建设,通过焊接参数、喷涂路径等数据积累优化作业质量。随着新能源汽车、航空航天等战略产业产能扩张,工业机器人应用将从单点替代向全流程智能化加速演进。 全球机器人市场正经历深刻的结构性变革,工业机器人作为产业先锋,在生产效率提升和工艺革新方面持续引领潮流。从劳动力替代到智能中枢的升级路径,预示着技术迭代将推动工业机器人市场从规模扩张迈向技术密集型发展阶段。中国市场的崛起不仅凸显了本土供应链的完善和智能制造的升级成效,也反映了全球机器人产业重心向亚太地区迁移的趋势。 未来三年,工业机器人应用将加速从单点替代向全流程智能化演进,这不仅需要硬件性能的突破,更依赖于多模态感知系统、模块化架构设计以及工艺数据库建设等多维度的技术攻坚。在新能源汽车、航空航天等战略产业的产能扩张带动下,工业机器人将深度融入制造业的柔性化、智能化升级进程,开启人机协作与多技术融合的新篇章。 微信号| Robo Lab 重构机器「看见世界」的方式。 用硬核科普+实战案例,拆解光束背后的科技革命。

 标签: 机器人
标签: 机器人




