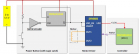
本设计采用内置LDO的低压H桥马达驱动器,一个超低功耗MCU,通过2-5.5V范围输入实现了一个长寿命的电池驱动型电动牙刷。 方案特点 电动牙刷电路对PCB尺寸和BOM元器件数量有较高要求,本方案可为DC马达提供5A连续电流和8A峰值驱动电流,PCB占位仅仅43.2 x 14.6mm,断电状态的电池漏电流小于50nA,并通过缩减元器件数量降低了系统成本。 电路通过SPST开关,把SN74LVC1G80 D-Type触发器和SN74LVC1G14逻辑转换器组合起来,可作为MCU和马达驱动芯片的ON/OFF开关,这样就无需一直按下按钮才能保持系统的运行。其中的D Flip-Flop开关在DRV8850的LDOEN引脚和nSLEEP引脚之间切换,使DRV8850运行于低功耗待机状态,并关闭LDO稳压器,有效降低MCU未使用时的功耗。 电路中的DRV8850 H桥马达驱动器有两个作用,一是将来自MCU的信号进行放大,并驱动马达;二是通过内置的LDO稳压器为MCU MSP430G2210供电。 MSP430G2210超低功耗MCU使马达驱动器的控制器,用来产生DRV8850的控制信号。MSP430G2210工作于1MHz的高频时钟,可在于1.8V的低压下运行。 芯齐齐BOM分析 电动牙刷BOM元器件数量24个,4个芯片低压H-Bridge驱动IC RGY0024B、混合信号控制器MSP430G2210IDR、单路反相触发器SN74LVC1G80DCK、斯密特触发器SN74LVC1G14DCK全部来自TI。 其他元件中,电阻R1、R4、R5用作分压,采用0402型精度选择1%;电容器采用二类介质材料的陶瓷电容器。所有元器件均可从硬之城(allchips)一站购齐。



 标签: h桥
标签: h桥

