
系统时序设计中对时钟信号的要求是非常严格的,因为我们所有的时序计算都是以恒定的时钟信号为基准。但实际中时钟信号往往不可能总是那么完美,会出现抖动(Jitter)和偏移(Skew)问题。
所谓抖动(jitter),就是指两个时钟周期之间存在的差值,这个误差是在时钟发生器内部产生的,和晶振或者PLL内部电路有关,布线对其没有影响。除此之外,还有一种由于周期内信号的占空比发生变化而引起的抖动,称之为半周期抖动。总的来说,jitter可以认为在时钟信号本身在传输过程中的一些偶然和不定的变化之总和。0Y:L7J
时钟偏移(skew)是指同样的时钟产生的多个子时钟信号之间的延时差异。它表现的形式是多种多样的,既包含了时钟驱动器的多个输出之间的偏移,也包含了由于PCB走线误差造成的接收端和驱动端时钟信号之间的偏移。
信号完整性对时序的影响,比如串扰会影响微带线表传播延迟(带状线,内层);反射会造成数据信号在逻辑门限附近波动,从而影响最大/最小飞行时间;时钟走线的干扰会造成一定的时钟偏移。有些误差或不确定因素是仿真中无法预见的,设计者只有通过周密的思考和实际经验的积累来逐步提高系统设计的水平。
Clock skew 和Clock jitter 是影响时钟信号稳定性的主要因素。很多书里都从不同角度里对它们进行了解释。
其中“透视”一书给出的解释最为本质:
Clock Skew: The spatial variation in arrival time of a clock transition on an integrated circuit;
Clock jitter: The temporal vatiation of the clock period at a given point on the chip;
简言之,skew通常是时钟相位上的不确定,而jitter是指时钟频率上的不确定(uncertainty)。造成skew和jitter
的原因很多。由于时钟源到达不同寄存器所经历路径的驱动和负载的不同,时钟边沿的位置有所差异,因此就带来了
skew。而由于晶振本身稳定性,电源以及温度变化等原因造成了时钟频率的变化,就是jitter。
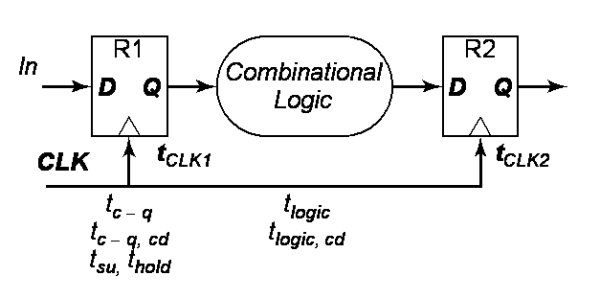
skew和jitter对电路的影响可以用一个简单的时间模型来解释。假设下图中t(c-q)代表寄存器的最大输出延迟,
t(c-q, cd)表示最大输出延时;t(su)和t(hold)分别代表寄存器的setup, hold time(暂不考虑p.v.t)差异;t(logic)
和t(logic, cd)分别表示最大的组合逻辑传输延迟和最小组合逻辑传输延迟;
在不考虑skew和jitter的情况下,及t(clk1)和t(clk2)同频同相时,时钟周期T和t(hold)需要满足
T > t(c-q) + t(logic) + t(su)
t(hold) < t(c-q, cd) + t(logic, cd)
这样才能保证电路的功能正常,且避免竞争的发生。如果考虑CLK2比CLK1晚t1的相位,及skew=t1。
则 t(hold) < t(c-q, cd) + t(logic, cd) - t1
这意味着电路由更大的倾向发生hold time violation;如果考虑CLK1比CLK2晚t2的相位,及skew=-t2,
则 T > t(c-q) + t(logic) + t(su) + t2
这意味着电路的性能下降了,但由于R2的hold time始终满足,所以不会有竞争的麻烦存在。clock jitter
始终是对性能造成负面的影响,一般设计中都需要专门留取10%左右的margin来保证。
clock uncertainty = clock jitter + clock skew. jitter 是 由时钟源产生的抖动。skew是时钟树不平衡引起的到达两个寄存器的延迟差。在cts之后,skew由工具算出,因此sta的时候clock uncertainty 可以设一个比较小的值。另外做hold check的时候因为检查的是同一个时钟沿,因此没有jitter只有skew.
slack + 满足时序 -不满足
设计是否满足时序的一个称谓


 /2
/2 





用户810258 2013-6-20 21:38