
项目背景
纺织机械按结构大致可以分为两大类:横机与圆机。按用途来分,又可分为织布机、羊毛衫机、手套机、袜机等。本项目所要研发的控制器,即是针对手套机的控制器。
手套机历史
手套机历史悠久,最早可以追朔到1948年。在著名的纺织国度意大利,一家名叫普罗蒂的公司,最早发明出了全机械的手套机。经过了五十多年的风雨历程,它也从机械式的丑小鸭到全电脑自动控制的小天鹅般的变化。
纯机械式手套机

简单电脑控制

全电脑控制
立项依据
国内手套机的发展阶段,仍处于简单电子控制阶段。这个阶段机型的特征是:
(1)机器动力源为一个变频控制电器,通过变速机构传递到主轴上,及其他执行机构上。导致机械结构相当复杂,故障率高;
(2)通过针鼓,对手套纺织进行编程;因为针鼓是机械结构,所以这样的编程方式局限性很大,且很不方便;
(3)只能织单色手套,不能提花;目前市场上单色手套的利润远低于提花手套的利润,这是手套生产厂家准备换代的一个重要原因。
方案选择
根据初步调查,目前国内有多家企业在研发下一代的手套机控制器。实现方案大致分两类:
被动控制式:机械主体结构与简单电子控制式大体相同,对机器上的重要部件编织头进行了改进,使它具备提花的能力。因为该方案中,控制器不能控制编织头的位置,反而是根据编织头的位置,来执行相应的动作,所以称为被动式控制。
它的优点是,机械改动小,上一代机器的设计、工艺和生产管理等基本兼容,可以最大限度的利用,有效降低了研发成本与风险。缺点主要是,机械结构太复杂,导致故障率高。
主动控制式:采用多个伺服电机替代了原先的变频器,及传动机构。使得机器的机械结构上大大简化。由于控制器可以精确控制编织头的位置,给编织工艺设计带来很大的方便。
它的优点是,机械结构简单,编织工艺控制方便。缺点是成本较高,控制系统结构较复杂。
总体方案
经过论证,在主动控制式的控制平台上,是可以实现被动控制的。所以,研发初期阶段以通用平台为主,兼顾主动与被动控制两种方案。产品化时,针对被动控制进行简化,以降低生产成本。
项目总体方案分为三个层次:
一:纺织CAD层
为方便用户使用,本项目贯彻所见即所得的设计理念。即用户在电脑上画出什么样的手套,最终就会在机器上织出什么样的手套。纺织CAD层提供了直观、方便的界面,供专心用户去实现他的手套设计;
而CAD层的背后,则是将用户的手套设计图样,翻译成工艺控制编码,控制机器实现手套编织。
二:工艺控制层
手套编织包含两个方面的工作:编织工艺与机械动作控制。编织工艺指手套编织时,每个机械零件的动作顺序。机械动作控制,指某个机械零件动作的实现过程。在与客户交流的过程中,我们发现了这样的现象:精通编织工艺的工程师,往往对机械设计不熟悉;而对机械设计熟悉的工程师,又往往对编织工艺一窍不通。在我们的开发团队中,也是如此。
基于这个原因,我们将所面对的这个混乱工程一分为二:工艺控制层由工艺软件设计工程师负责,根据手套编织过程,确定一套编指令集。每个手套的编织,都可以通过调用这套编织指令集实现(CAD层就是将设计图样,翻译成指令程序)。每个指令,又是一个或几个动作的组合。
工艺控制层的工作就是,将工艺控制命令,转换成动作控制命令。
三:动作控制层
动作控制层就负责精确控制各个可动零部件。提供单独的控制命令,控制单一的可动部件,而部件动作的组合,则由工艺层来完成。
这样,动作控制层设计基本上可以不考虑手套工艺问题,而手套工艺控制,也基本上不用关心下层是如何实现的。
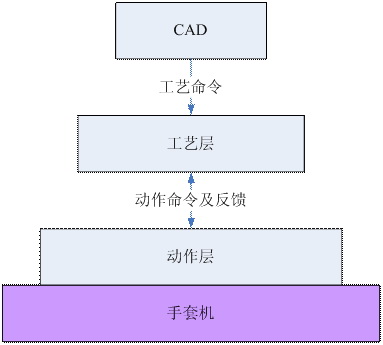
项目层次图
项目实现
纺织CAD层:以PC及Windows为平台,Visual C++为编程工具。实现普通手套、平指、元宝手套等版式,及手套上各种花型图案的设计。以文件为形式,U盘为载体实现CAD层与工艺层的数据交换。
工艺控制层:以ARM及Linux为平台,QT为开发工具,640*480大屏幕为用户显示界面。采用S3C2410为处理器、200M主频、32M SDRAM、64M NAND FLASH、VGA显示,完全而流畅的完成各种控制任务。工艺层与动作层之间采用专用的数据总线,实现数据交换。
动作控制层:以DSP为平台,实现对各种机械的控制任务。采用TI C5402 DSP处理器,并用EPM3512 CPLD做IO端口扩展。实现四路伺服位置控制环(编码器反馈)、50路大功率数字输出、16路数字输入。
总结
目前,国内手套机高端市场,仍然由意大利、日本、韩国等产品占据,国内产品基本上是空白。令人欣慰的是,国内有不少厂家正在努力的开发,有的已经推出了较稳定的产品,相信不久的将来,这种状况会改变。


 /2
/2 





用户154115 2008-6-16 11:47