
2设备测试
通过神经网络对水下滑翔机建模能力强的特点,有效地减小了预测模型所需数据的维数,真正挖掘了数据的价值。本文对水下滑翔机的平衡参数进行了分析,并结合海水涨落等实际问题。通过与其它传统方法的比较,证明了神经网络具有较高的精度和适用性。
2.1机翼调整试验
在模拟海况的水池中进行了两组或两组以上的调距试验。我们做的测试越多,精度就越高。俯仰调整试验包括两个步骤:第一步是移动电池组的位置,第二步是移动油量的位置。。当潜水或上升时,水下滑翔机通过改变油囊内外的油量来改变浮力。滑翔机的状态同时也在变化。试验的目的是找出蓄电池位置、油量和俯仰角之间的关系。
2.2提取数据和数据预处理
数据预处理是指对数据进行某些处理后再进行主处理。必须消除大滞后系统的影响。从滑翔机调整试验中获得两组数据。根据分析,预测模型以电池组位置和油量为输入因子,输出因子为俯仰角。一组数据用作训练数据,另一组数据用作测试数据。
2.3神经网络
该网络模型包括五个部分,分别是输入层和输入节点、隐藏层和隐藏节点、输出层和输出节点、用于海燕滑翔机的传递函数和基于神经网络的训练方法。因此,在海燕滑翔机中,神经网络模型开发中最重要的决策环节是选择海燕滑翔机要使用多少个隐藏节点。
3实验
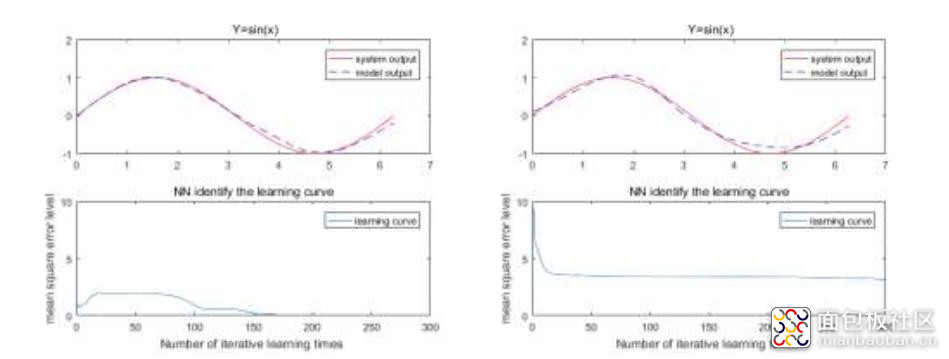
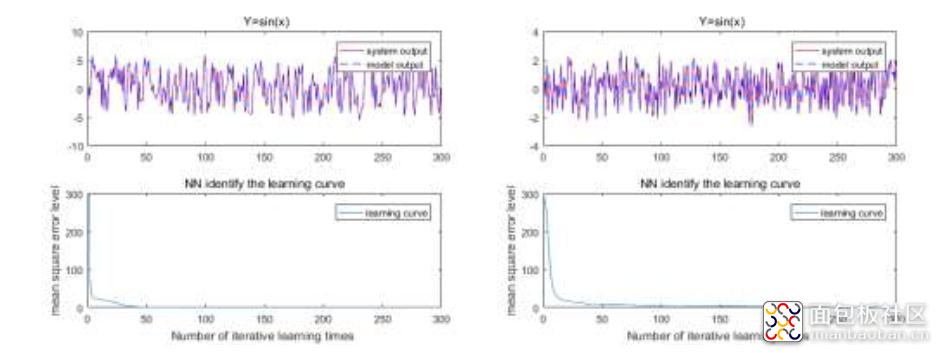
根据建立的神经网络模型,选择参数、电池位置和油量作为平衡状态。平衡参数对运动控制和滑翔机的飞行轨迹具有重要意义。在复杂的海况下,平衡参数不是常数,而是一系列的动态数。通过第四节建立的神经网络模型,求出一系列可行的平衡参数。这种神经网络模型方法适用于复杂的水下环境。
4结论
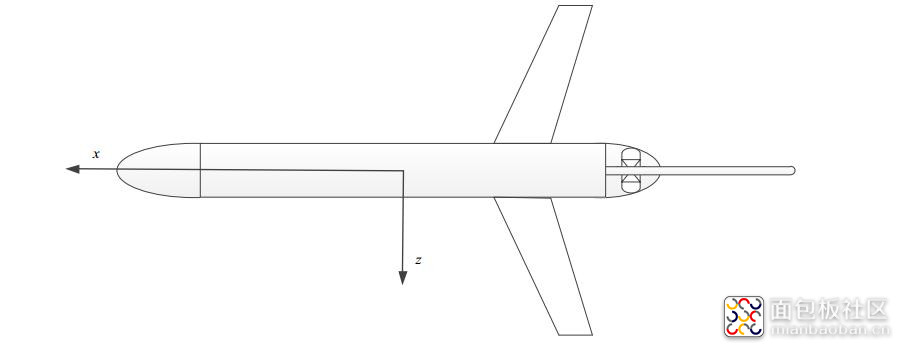
根据海燕滑翔机的机械结构,通过俯仰调整试验,提取数据和数据预处理及二阶航向,选择神经网络方法,建立水动力模型,并在南海进行试验。基于神经网络的水下滑翔机运动控制是一种有效的控制系统,它可以将水下滑翔机的出水位置和设定位置的误差从10%降低到5%。将分析结果与实际情况进行比较,实验表明该神经网络模型是可行的。
作者: curton, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3876349.html
版权声明:本文为博主原创,未经本人允许,禁止转载!



 /1
/1 







文章评论(0条评论)
登录后参与讨论