
一. 灵动的礼物
首先感谢面包板社区,能够给我提供这次的机会,其次,感谢灵动微电子提供给的无刷电机FOC开发板,作为一个电机控制的爱好者,非常喜欢MM32 Motor;
灵动的客服人员和负责业务的小姐姐也都非常的热心,对于群里面有人提问的每一次问题都非常耐心的回答,从来都没有糊弄过一个使用者;对于写测评的爱好者,又免费提供小熊、电机和MM32-LINK仿真器,而且每次快递都是顺丰快递,运费完全由灵动微电子公司出,真的是每一件小事情都考虑的非常的周到,之后我在想究竟是什么一群人,在做灵动微电子行业,做的如此的出色,我想他们的初心一定是能够使灵动微电子行业,能够对社会做出更大的贡献,不辜负每一个热爱灵动微电子行业的爱好者。在此,我非常感谢灵动微电子提供了一个很好的交流平台。
二. 灵动和小电机的亮相
首先,我们来看一下两块板子的照片吧



通过上面的照片,我们发现设计的非常的巧妙,焊工也非常的扎实,可见灵动公司的设计人员非常的仔细认真,整体效果不错,子母板叠层设计,MCU板可更换,便于升级MCU。板子PCB布局比较合理,按键部分避开了电源输出调试线路,非常赞!MCU板引脚资源也都给用户引出了。
三. 硬件部分
本次实验的目的,主要是让FOC无感电机实现七段调速,对于FOC无感电机,灵动微电子的工作人员后期给我们免费邮寄了此电机,对此非常感谢相关的工作人员。因此,我对电机进行介绍一下。
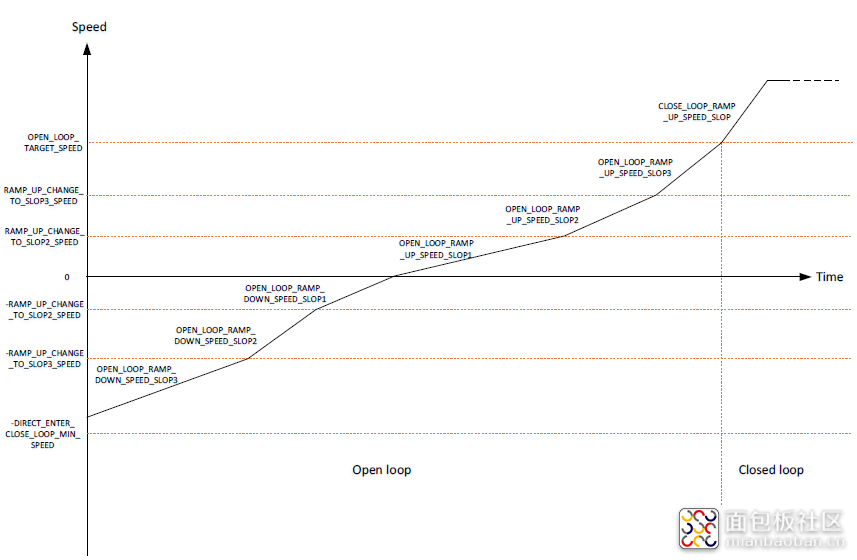
上图为启动前的初始速度介于DIRECT_ENTER_CLOSE_LOOP_MIN_SPEED ~RAMP_UP_CHANGE_TO_SLOP3_SPEED 参数设定值之间, 启动后首先将以OPEN_LOOP_RAMP_DOWN_SPEED_SLOP3 设定的减速度降速, 当速度低于RAMP_UP_CHANGE_TO_SLOP3_SPEED 时将改变减速度的设定值为OPEN_LOOP_RAMP_DOWN_SPEED_SLOP2, 之后依据下图所示的程序降速至 0, 接着以三段式正转开回路加速度升速至闭回路控制。
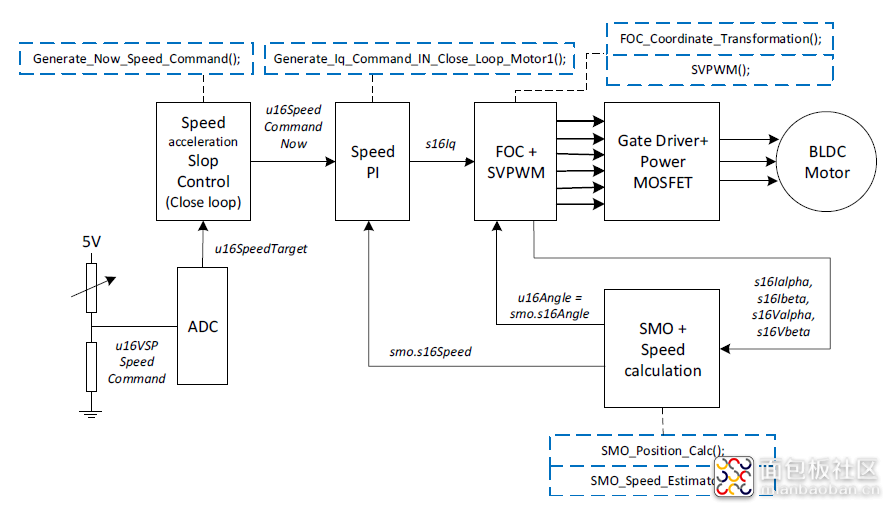
下图为闭回路驱动软件设计框图。 软件流程一开始是由ADC 读取外部输入电压产生目标速度命令, 经过闭回路加速度斜率控制器运算后, 得到可提供速度PI 控制器功能方块的速度命令, 接着用此速度命令与反馈的实际速度, 经由PI 控制器计算之后产生力矩电流命令。 磁场导向控制器(FOC)功能方块接收到此力矩电流命令及电机的估测角度后, 经过三相电流的反馈、坐标转换、 电流环PI 计算、及空间矢量调制(SVPWM)等法则运算, 由此获得要逼近目标转速所需求的三相PWM 占空比数据, 之后将此数据产生PWM 输出给予外部的电力驱动组件, 以此驱动电机运转。 在磁场导向控制器功能方块产生PWM 讯号的过程中, 滑模估测器(SMO)功能方块负责产生电机运转所需要的估测角度及速度。
四. 软件部分设计
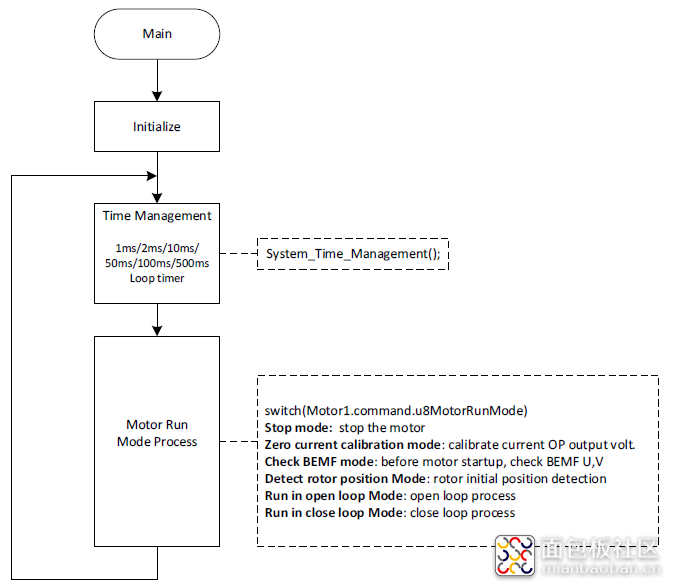
上图为主要的软件控制流程图,在 Main()程序中除了初始化的各个子程序之外, 主要功能为系统时间管理 system_time_management();及电机运行模式的处理(Motor Run Mode Process)。
系统时间管理system_time_management();
电机运行模式处理(Motor Run Mode Process)主要是安排电机各种不同模式的状态流程管理, 总共有五种状态模式, 依序为: 停止/零电流时校正/检测BEMF/开回路运行/闭回路状态模式等。
停止模式;电机处于停止状态。
零电流校正模式:电机收到启动命令后, 电机尚未启动, 故运算放大器的输入端为零电流的输入状态, 此时需ADC量测电流运算放大器输出的电压值, 做为后续电流量测的校正值, 完成后接下来将会执行检测BEMF状态模式。
检测BEMF模式:零电流校正状态模式完成后, 需先检测电机目前是处于静止、顺转或逆转的哪一种状态, 以便做为后续如何启动电机的依据, 这个电机状态的检测是由BEMF U, V 电压值的侦测而得知的。
开回路模式:电机处于开回路运行状态中。
闭回路模式:电机处于闭回路运行状态中。
五. 实验部分
首先分享一下我们搭建的主要控制电路




如上图,我们用直流24V电源给我的电机板就行供电,同时我的电机三项UVW分别接到主控电路板上面,而且我给电机上也装载了一个白色的小风扇,完全由我自己改装的小风扇。
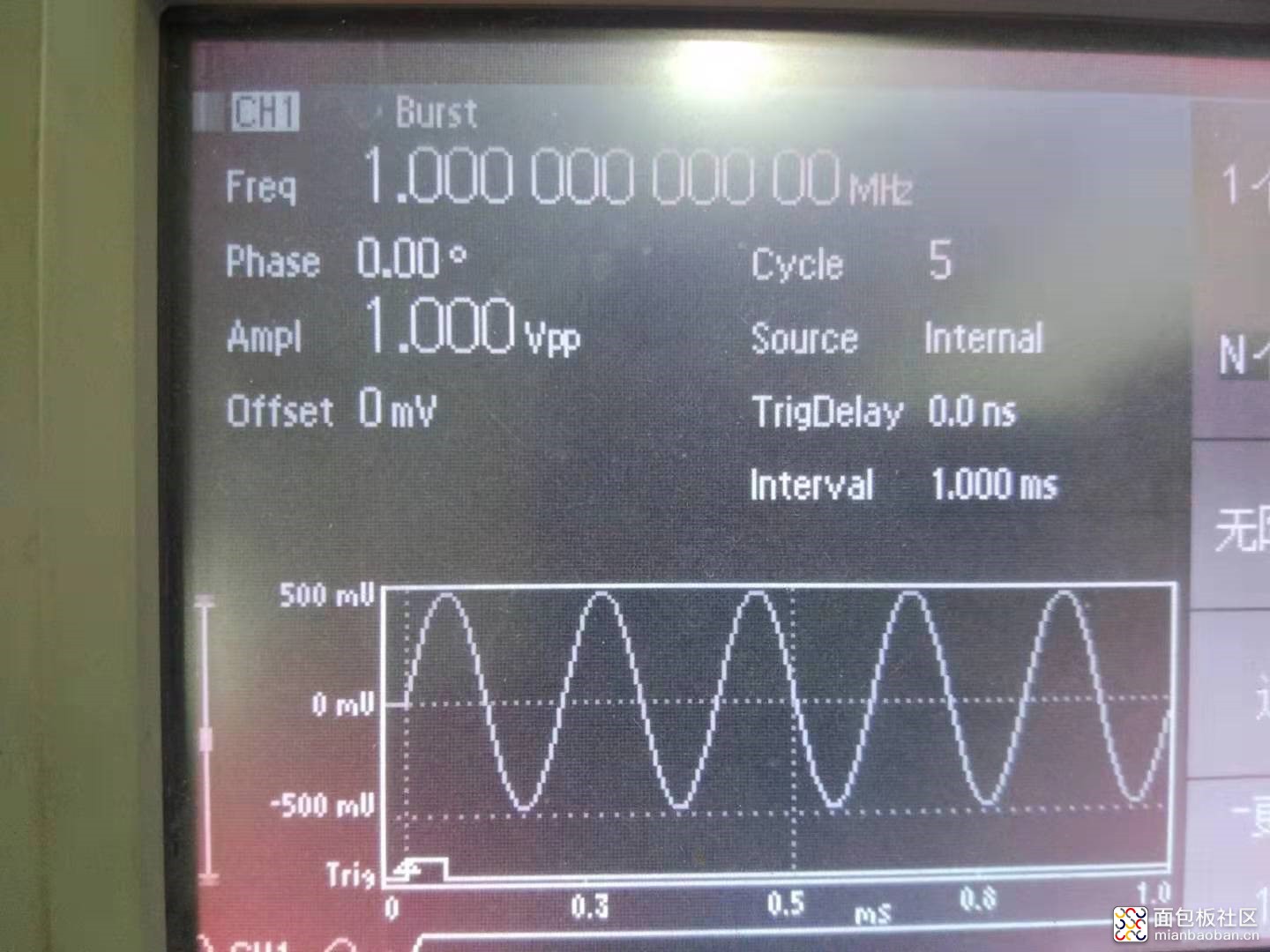
接下来,我们给电路接上我们的示波器,通过示波器来观察我们的输入和输出的波形。


如上面的波形,我们可以发现上面的波形是有干扰的,对此我们进行改善我们的装置。输出的波形如下图所示:
对此,我们完成对电机的测试。通过测试,我们发现电机的运行良好,调速方便,可以快速的实现电机的转速的上升和控制。
六. 总结
不知不觉三周过去了,我已经开始慢慢掌握灵动电机的原理了,不敢说自己学会了全部的知识,但是自己敢说自己用心在学习了,用心学习的感觉,真好,像是在大海中航行的船一样,逐渐的驶向远在天边的彼岸,整个过程都是非常的踏实与安心的,因为自己在按照方向,不断的前进。
我还是想感谢灵动的工作人员,非常耐心的在群里指导,还有思思姐,不仅人长得非常好看,而且做事情也非常有条理,尽力的帮大家处理发货问题,对此,我表示衷心的感谢,我之所以走到今天,正是由于你们的帮助和付出,非常感谢灵动微电子了,非常喜欢你们的电路板。
作者: 火引冰薪, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3896095.html
版权声明:本文为博主原创,未经本人允许,禁止转载!


 /5
/5 






王中王 2019-12-9 17:10
curton 2019-11-1 21:04