
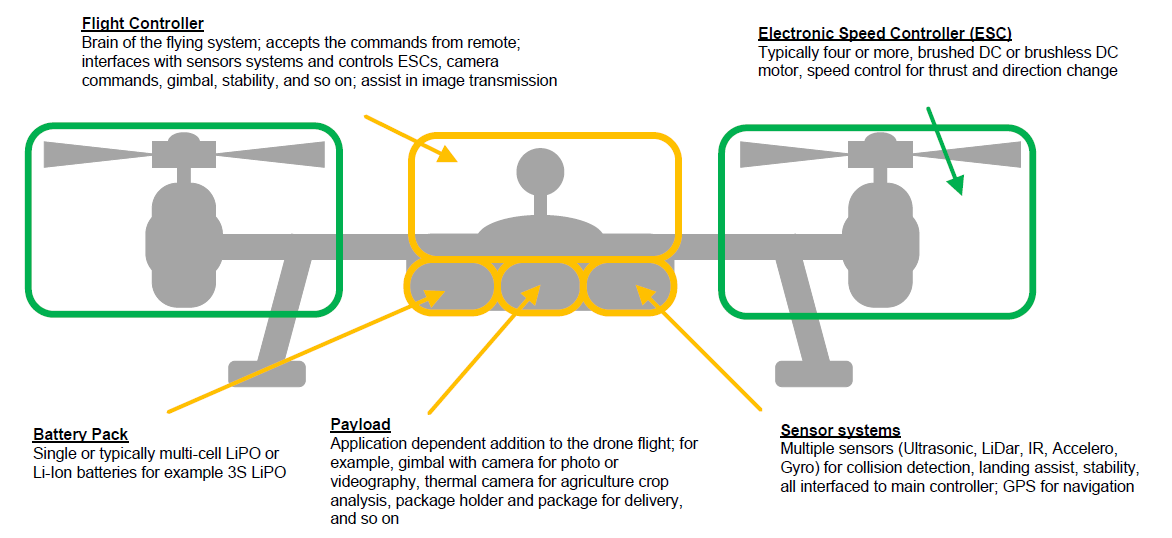
就无人机而言,其完整飞行系统一般由飞行控制器(Flight Controller)、电子速度控制器(ESC)、传感器系统,以及载荷(Payload)、电池组等子系统和模块组成。其中,电子速度控制器(ESC)定义了无人机的动态运动性能和飞行时间,是非军用无人机中非常重要的子系统。
无人机必须能够完成的一些运动模式包括:
• 精确运动模式:航行、悬停。
• 快速运动模式:沿x/y/z方向360°旋转、水平最高速度飞行、垂直最高速度飞行。
为了提供这些功能,需要使用优秀的ESC来控制所用电机在所有速度下产生的升力。这样一来,基于位置传感器模块的稳定算法可以补偿影响无人机的振动和外力。能够改变的电机速度越快,稳定算法需要执行的速度变化就越少;因此,使用的能量少于无人机以高度变化的速度运行的情况下(使用动态性较差的ESC时便属于这种情况)所需的能量。
无人机的发动机运行速度必须按照无人机的重量和螺旋桨的尺寸确定,以便产生无人机飞行所需的升力。为无人机设计的典型三相无刷电机具有以下常见特性:
• 低电感
• 低电阻
• 两到八个极对
• 1000Hz或更高的电气频率
该电机采用优化设计,可由包含两节至六节电池(即7.4V至22.2V直流电压)的锂聚合物电池供电。这些电压用于设计所选电机的最大速度。此处的一个常见问题是以最大速度运行接近VBUS的电机,因为此处的FOC算法和无传感器算法都必须足够出色才能支持此运行方式。如果用户需要更高效的机型来实现更长的飞行时间、更好的动态行为和更加平顺、稳定的性能,就需要使用ESC模块。
(2)ESC电机控制根据所要设计的无人机类型,可以对ESC的性能做出某些妥协。在设计低端无人机时,通常使用刷式直流电机或三相梯形反电动势控制型电机,因为此类电机价格便宜并且性能在可接受范围。这些电机通常采用开环控制方式运行。角度和电流控制都是如此。
中端无人机通常使用三相梯形反电动势电机。与前者的不同之处在于,这种电机在运行时将采用闭环角度估算技术,也可能是采用一种简单的电流控制算法,但通常属于开环电流控制方式。为了节省成本,这种电机使用低性能控制器。
高端无人机通常使用三相正弦反电动势电机。在某些情况下,还使用梯形反电动势电机,但会导致动态性能比正弦绕组电机的动态性能更差。
目前有一种从梯形控制技术向正弦控制技术过渡的趋势,而这种发展趋势使无传感器的控制技术变得更加重要,因为使用角度传感器会导致解决方案缺乏成本竞争力。除了成本之外,此处的第二个问题在于传感器所需的高速度。
如果想要构建ESC以便开发无传感器算法,从而提供足够出色的角度精度来控制电机,这当然需要付出一些努力。本设计采用正弦控制方式,以1到5度的最小精度测量转子的磁场角度,从而使用FOC算法确保最大扭矩,或根据电机的相电压和相电流估算转子磁角(无传感器算法)。
本系统的ESC适用于使用无传感器算法的三相无刷电机,设计需要一个具有上述传感能力的三相半桥功率级,以便生成无传感器算法所需的反馈信号。此功率级必须由包含两节至六节电池(即VBUS为7.4V至22.2V)的锂聚合物电池供电。
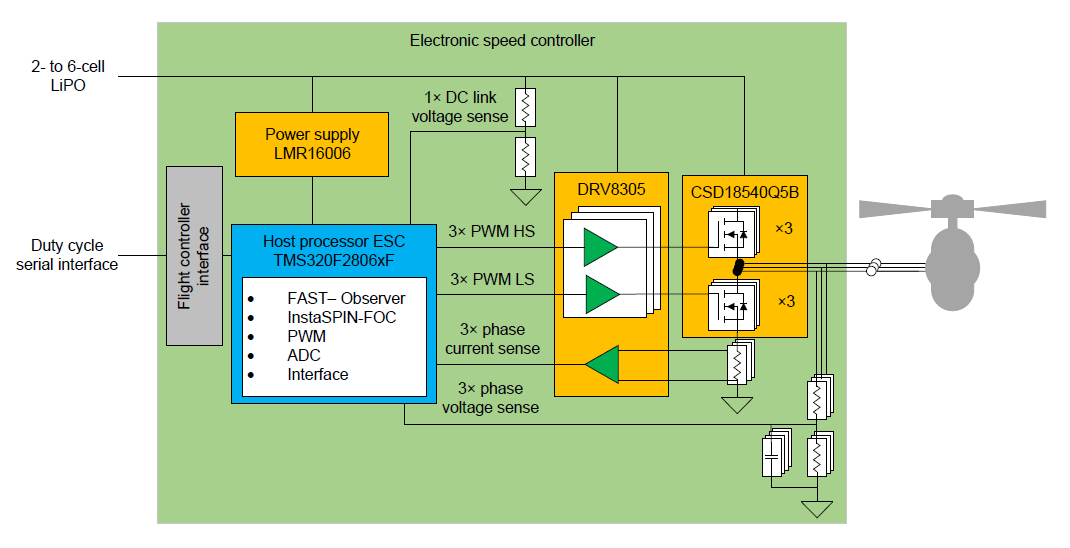
由于电机和依赖于频率的传感器具有较低的时间常数,因此PWM频率较高;典型的电流设计使用大约45kHz至60kHz的PWM频率,并有进一步增加的趋势。其次需要一种与飞行控制器通信的方式,可使用占空比或串行通信方式完成。
LaunchPad和BoosterPack采用单个电源供电。该电源的电压范围为4.4V至45V。功率级包含用于无刷直流驱动器的三个半桥。这三个半桥必须以最大速度为电机提供功率,使电机功率可高达500W。
BoosterPack还支持无传感器算法所需的电压和电流检测。本示例中需要测量的是VBUS、三个相电压和三个相电流。电流测量通过低侧分流器完成,所使用的三个电流检测放大器集成在DRV8305 IC中。
对于ESC控制器,需要使用TMS320F28069F来提供电机控制平台。使用此器件可以启用无传感器反电动势观测器算法InstaSPIN-FAST。该算法为客户提供基于反电动势的角度估算器,而目前在电机控制的设计阶段只需要考虑FOC算法。InstaSPIN-FOC算法是作为BSD授权的开源软件包(称为MotorWare)提供的;通过该软件包,客户可以开始使用FOC电机控制,并且可以使用客户特有的算法更新和改进该算法,从而重点关注电机的实际运动而不是角度估算,这种方式正在取代角度传感器。
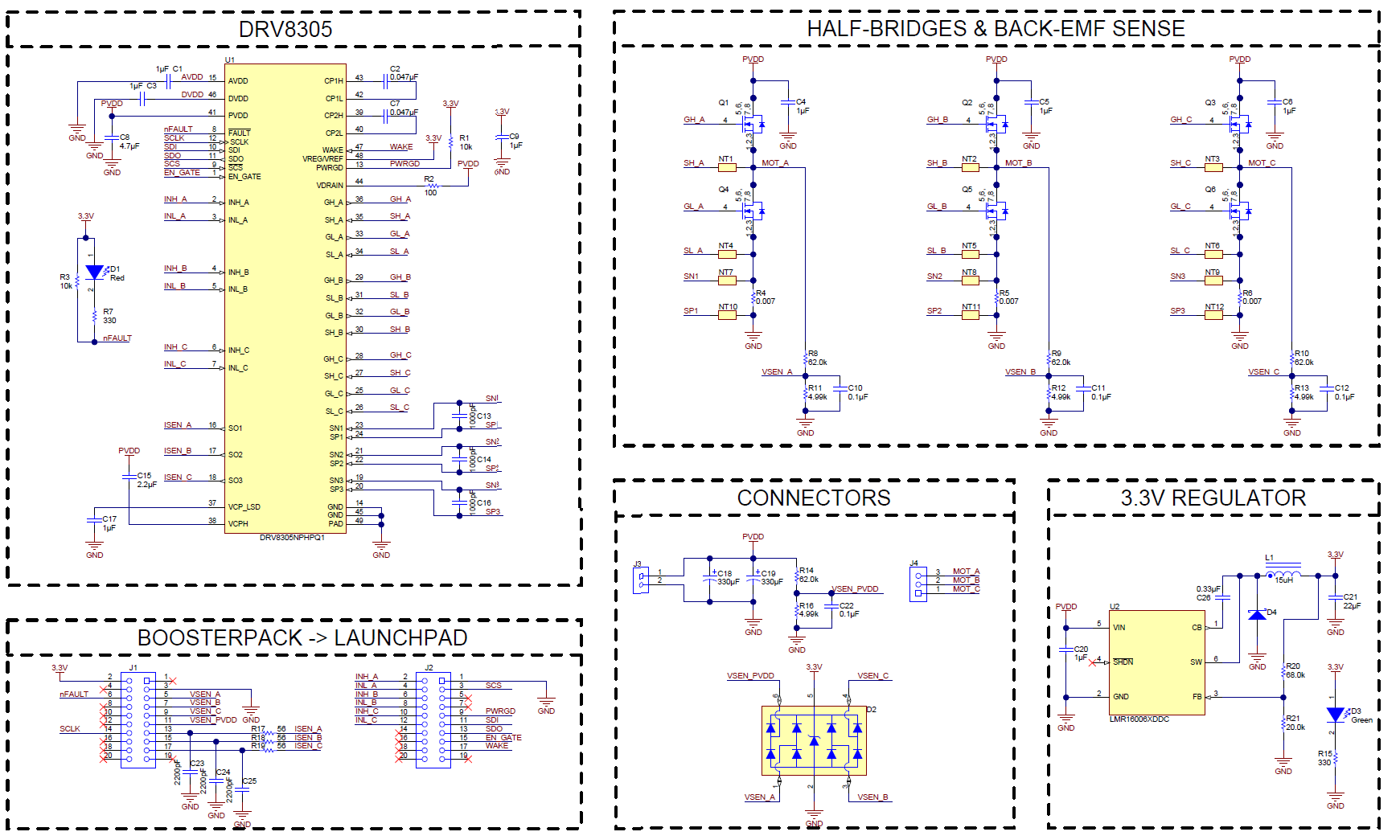
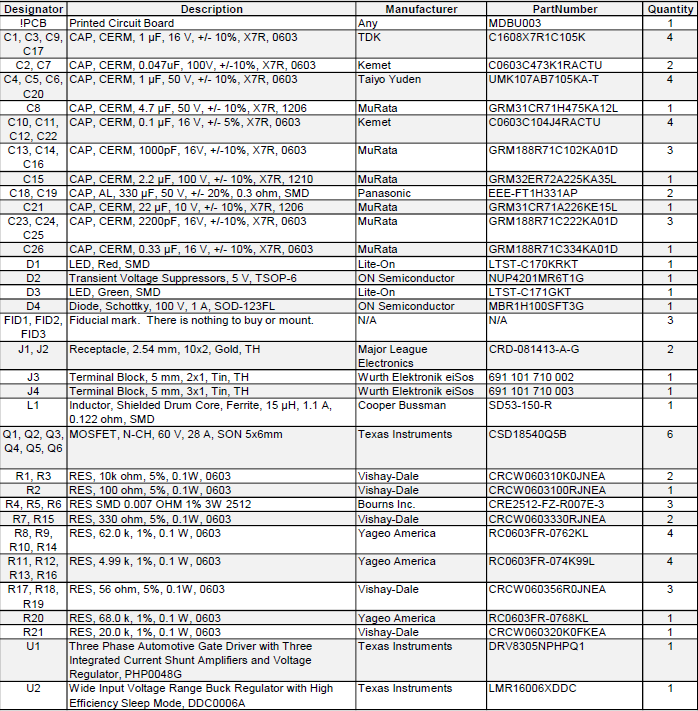
本参考设计出自TI,BOM元件总数67个,三个核心器件DRV8305栅极驱动器、LMR16006稳压器、CSD18540Q5B功率MOSFET也来自TI。
其中,DRV8305是一款适用于三相电机驱动应用的栅极驱动器IC的需求。该器件提供三个高精度修整和温度补偿的半桥驱动器,每个驱动器能够驱动一个高侧和低侧增强模式N沟道MOSFET。DRV8305工作电压4.4V至45V,具有三个基于电流器的电流检测放大器,可实现对电流的精确测量,支持100%占空比,并且具有多级保护。
LMR16006是PWM降压稳压器,具有4V至60V的宽输入电压范围,关断电流1μA,在ECO模式下的待机电流为28μA,适用于从工业到汽车的广泛应用中非稳压电源的电源调节。
CSD18540Q5B是60V 1.8mΩ的NexFET功率MOSFET,具有超低Qg和Qgd、低热阻等特点,可用于最大限度地降低电源转换应用中的损耗。该器件封装尺寸为5mm×6mm,无铅端子镀层,无卤素,符合RoHS。
被动元件中,C18、C19滤波电容器选择330μF、50V、+/-20%、0.3欧姆内阻的铝电解电容器,其余均采用X7R介质的MLCC陶瓷电容器。
R4、R5、R6电阻器选择0.007欧姆1%精度的3W功率元件,R8、R9、R10、R14用以调整电压标度,需采用1%精度0.1W规格。系统电机的电气速度还取决于由串联电阻器R14和R16与电容器C22组成的滤波器,R14和R16应选择62.0kΩ和4.99kΩ,且选择的C22为0.033μF。
作者: 硬之城Allchips, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3975615.html
版权声明:本文为博主原创,未经本人允许,禁止转载!


 /2
/2 





yzw92 2022-8-6 10:15