原创
为AM335x移植Linux内核主线代码(1)了解dts
http://events.linuxfoundation.org/sites/events/files/slides/petazzoni-device-tree-dummies.pdf 6)Barebox变量:bootm.image (?)
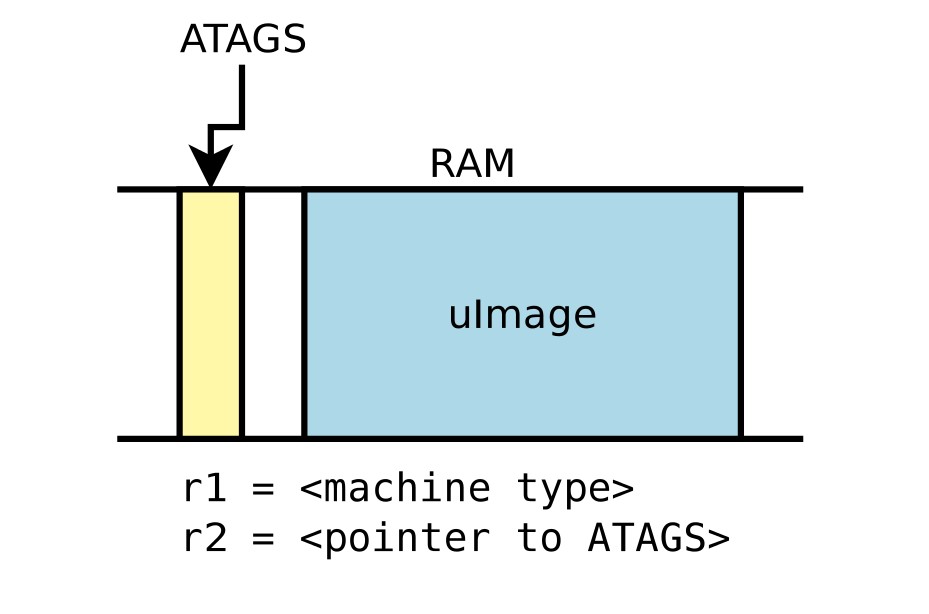
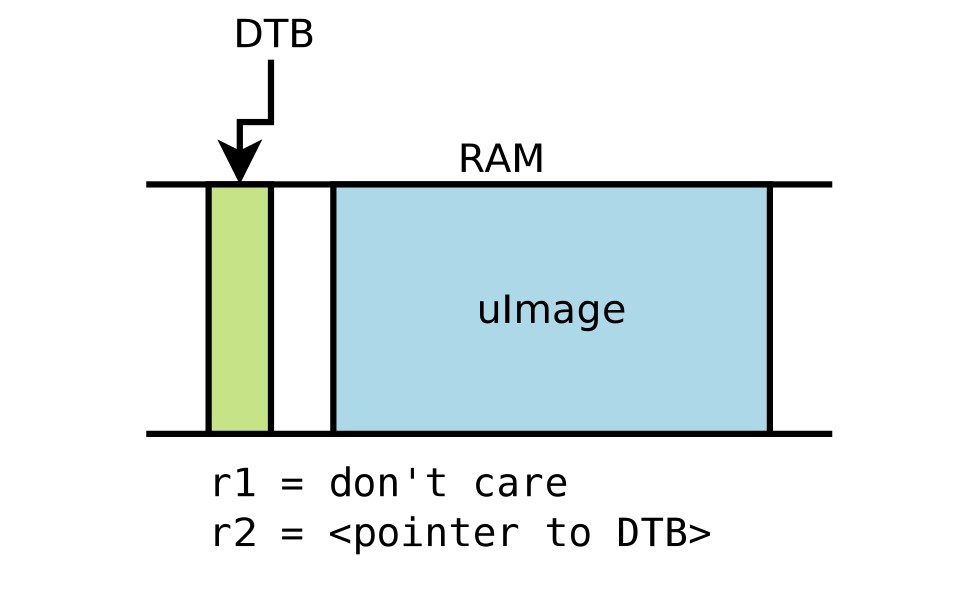
现今的内核版本使用了Device Tree: - 6)Barebox变量:bootm.image,bootm.oftree
有些bootloader不支持Device Tree,或者有些专门给特定设备写的版本太老了,也不包含。为了解决这个问题,CONFIG_ARM_APPENDED_DTB被引进。
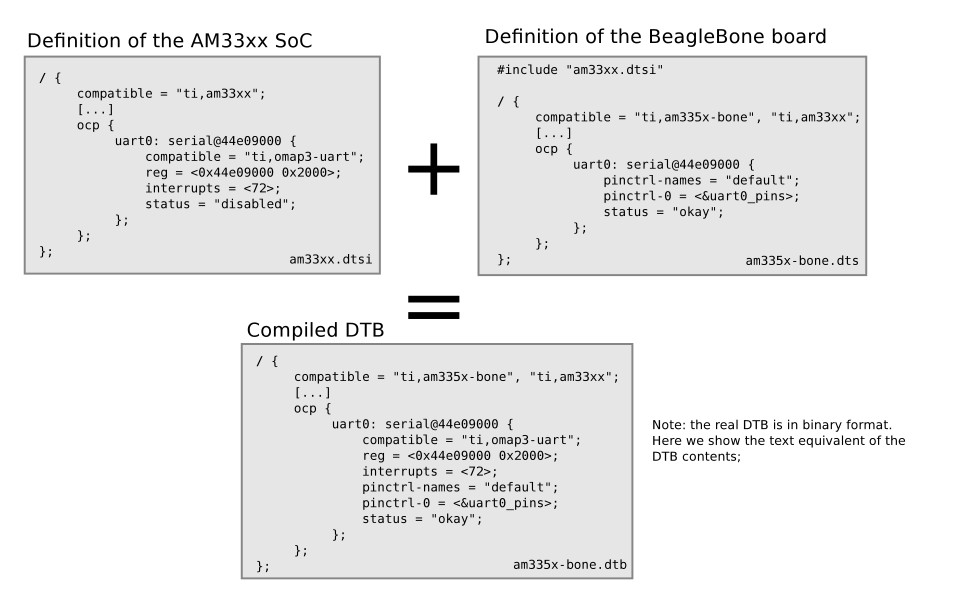
From Source to binary
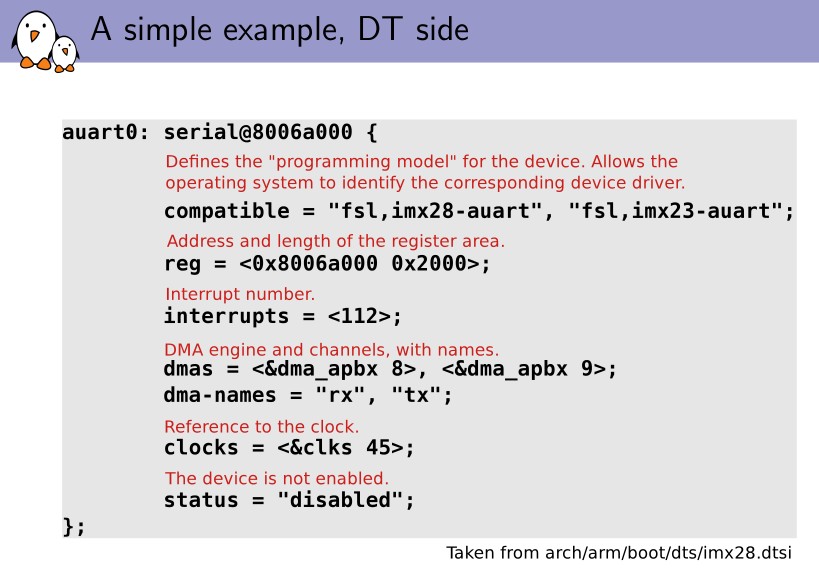
上图是pdf里面自带的例子,我再从arch/arm/boot/dts/am33xxx.dtsi中摘录了两个:
由这张图可见,如果included file中的某项,被including file文件定义了,则会使用后者的定义,也就是使用更上层更新的定义;如果没有被定义,则添加进入。



 /1
/1 






文章评论(0条评论)
登录后参与讨论