
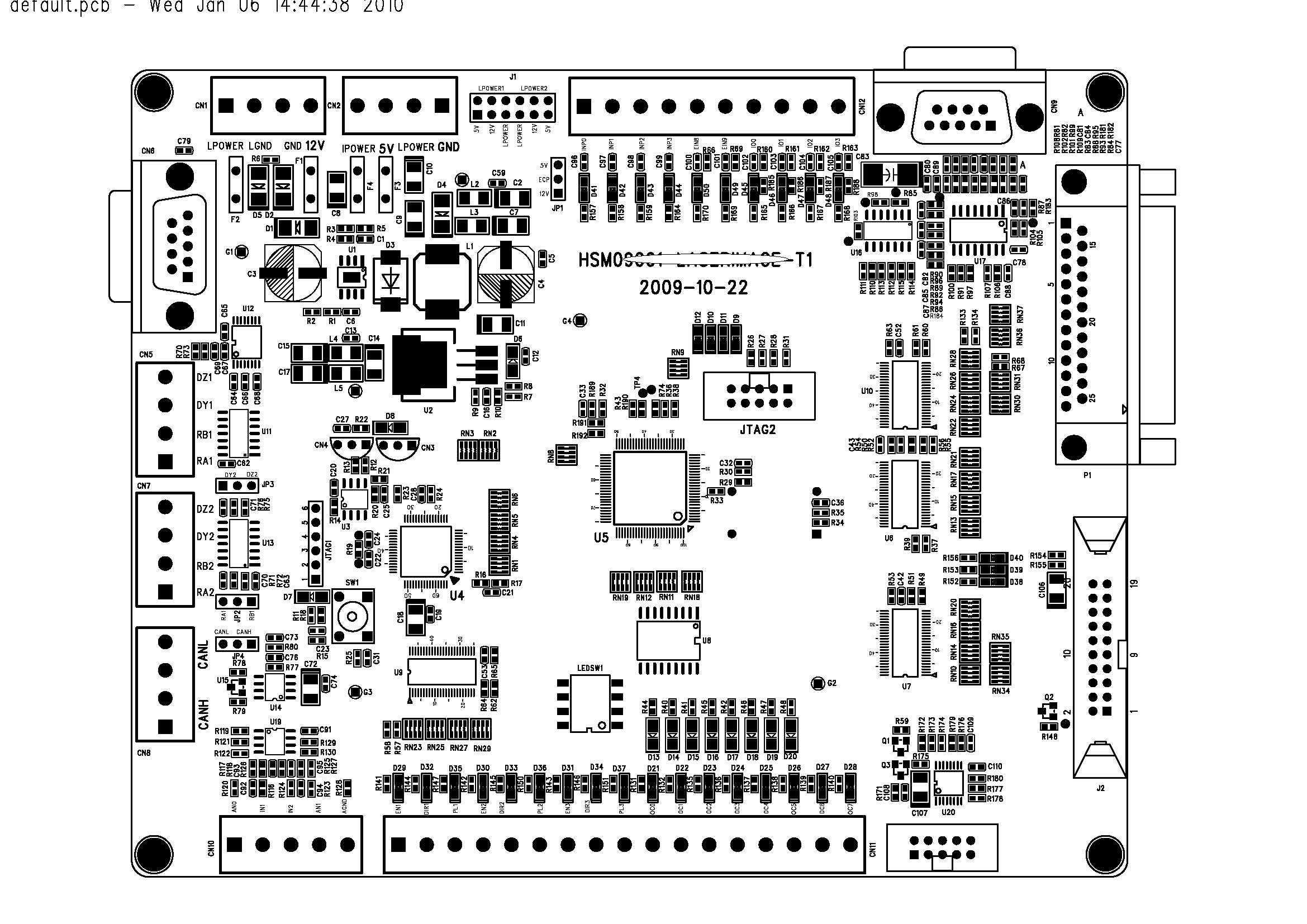
开发平台框架:MCU+CPLD
MCU:16位高速MCU:PIC24HJ64GP506或PIC24HJ64GP206
设计功能:
1. 电源:采用TI的TPS5430设计,体积小,实现3A/5V,输入:10-35V,过压过流保护设计;
2. CPLD扩展IO,并口高速总线,配100MHZ有源晶振,可检测高速信号(如编码器);
3. IO:ULN2803驱动输出,驱动电源可选,ALVC164245输入输出,输出共17路,输入共10路(另可根据设计设计进行调配),绿端子接线端子,方便实用;
4. RS232串口和485总线设计,可同时和PC,其他485总线模块通信;
5. CAN总线:PIC24HJ64GP506+TJA1050;
6. 三路差份信号输入,可接编码器等高速信号,单端,差份可选;
7. 两路1WIRE总线的DS18B20温度测量;
8. 两路ADC,DAC可选;
9. SPI总线扩展接口,可接触摸屏等外设;
10.带IIC总线EEPROM(24C64等系列);
10.预留LCD并行接口;
11.预留DB25的IO接口,接线方便,满足更多的设计应用;
12.IO状态LED指示,便于开发,调试;
13.开发工具MCU:ICD2,MPLAB,CPLD:Quartus,modelsim,synplify
公司某项目应用实例:
1. 采用1000线编码器反馈,控制步进电机,闭环控制负载做加减速,位置量运动,
2. 接固态继电器,采用PWM方式控制交流减速电机的运行,两行程限位检测;
3. 开环控制步进电机,两行程限位检测;
4. 10路光耦输入信号;
5. 3路电机正反向运动;
6. 继电器带功率负载
7. DS18B20温度测量;
8. RS232同PC通讯;
9. CAN总线同其他模块通讯
<?xml:namespace prefix = o ns = "urn:schemas-microsoft-com:office:office" />
应用:
1.机械设备的运动控制;
2.功能设计和验证;
3.PIC MCU学习;
4.CPLD学习
功能实现(代码案例)---待后续



 /5
/5 






用户700580 2010-4-13 11:47
pjallen_861848674 2010-4-9 12:00