获得实时可靠的交通信息一直是智能交通系统发展的瓶颈问题,建立智能交通车载信息采集系统,可以为智能交通系统中驾驶行为特性的研究、交通数据采集、现场测试等提供良好的辅助测试、验证平台。
还可以为我国智能交通系统多功能实验车的建设和发展提供强有力的技术支持。本文介绍的就是基于虚拟仪器技术的智能交通车载信息采集系统的设计和研究。
智能交通车载信息采集平台主要是采用卫星定位技术、传感器技术和数据采集技术,建立智能交通系统相关技术开发、研究和实验所必需的环境,为智能交通系统中驾驶行为特性研究、交通数据采集和现场测试提供良好的辅助测试和验证平台。其主要功能为:实时同步采集各种车载传感器数据,并按照一定格式保存这些记录;采用多种多传感器信息融合算法对各个传感器数据进行离线处理,从而验证各种多传感器信息融合算法,并比较各个算法的优劣;用多传感器信息融合算法处理后的结果可以用来改善定位系统的精度,提高系统可靠性,通过对速度和加速度等信息的采集和处理,可以对驾驶员的驾驶行为进行分析,研究其驾驶行为特性。
本设计的智能交通车载信息采集平台的硬件主要包括各种车载传感器、I/O接口设备和车载计算机三个部分。平台的软件使用LabView,它是NI公司利用虚拟仪器技术开发的32位面向计算机测控领域虚拟仪器的软件开发平台,可以在多操作系统下运行。整个数据采集平台的软件设计采用了模块化、结构化的设计思想,其中又包括了许多功能模块。实时控制部分模块包括I/O接口设备初始化模块、数据采集模块、数据显示模块、数据存储模块和移动检测模块、数据读取模块和多传感器信息融合模块。
系统硬件的设计
本系统硬件由GPS OEM板、MicroGyro100双轴陀螺仪、ADXL202EA双轴加速计、SCC信号调理模块、数据采集卡DAQPad-6015和计算机等组成。
GPS ITrax02直接连接到PC的串口,ADXL202EA、MicroGyro100经SCC信号调理后,利用DAQpad-6015进行数据采集。系统结构框图如1所示。
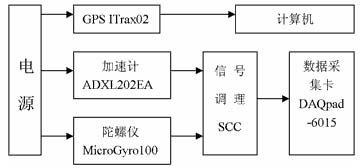
图1系统结构框图
GPS供电电压范围是3.4~6V,ADXL202EA供电电压范围是3~ 5.25V,陀螺仪供电电压范围是2.2~ 5.5V,因此,统一选取输出5V的电源作为供电电源。GPS ITrax02输出的数据通过RS232输入计算机完成时间和位置信息的提取,加速度计与陀螺仪信号通过信号调理电路SCC完成放大与隔离,再利用DAQpad-6015完成A/D转换输入计算机,从而计算出车辆的加速度、速度、位置和姿态角等信息。
加速度计是惯性测量单元中一个关键性元件,它是用来测量运动车辆相对惯性坐标系运动的。加速度在载体坐标系的分量经过捷联矩阵变换到沿地理坐标系的分量,再经过一次积分和二次积分就可以分别得到运载体的速度和位置。随着惯性技术发展的需求,加速度计也不断发展完善。
ADI公司的ADXL202EA属于微机械加速度计,以集成电路工艺和微加工工艺为基础,其体积小、重量轻、功耗小、成本低、易集成且过载能力强。
尽管中、低精度陀螺不能满足惯性测量系统的要求,但可以同全球卫星定位系统组合成造价低廉的微型组合导航系统,这是一个发展方向。在这样的组合导航系统中,陀螺仪和GPS相互取长补短,组合导航系统的长期精度由误差不随时间积累的GPS来保证,当短时间失去GPS信号时,由微惯性元件提供运动的动态参数和状态信息,而GPS正常工作时微惯性元件利用GPS信息进行校正,以提高精度,因此本系统采用微机械陀螺仪作为车载传感器。
NI公司的SCC模块是针对基于PC的测量和自动化系统所使用的高度模块化、低成本的信号调理系统。SCC提供了一个紧凑、便携式的系统,以便进行单/双通道信号调理和连接。
本系统选用的数据采集卡DAQPad-6015是16位精度的NI USB多功能DAQ产品,单通道采样率高达200kS/s,该器件还具有内置的螺纹终端连接,不必额外购置线缆和接线块。
系统软件设计
本系统的软件设计主要包括GPS信息获取模块的软件设计和惯性传感器的数据采集与处理模块的软件设计。
通常GPS定位信息接收系统主要由GPS接收天线、变频器、信号通道、微处理器、存储器以及电源等部分组成。由于GPS定位信息内容较少,因此多用RS-232串口将定位信息(NEMA0183语句)从GPS接收机传送到计算机中进行信息提取处理。GPS接收机只要处于工作状态就会源源不断地把接收并计算出的GPS导航定位信息通过串口传送到计算机中,从串口接收数据并将其放置于缓存。在没有进一步处理之前,缓存中是一长串字节流,这些信息在没有经过分类提取之前是无法加以利用的,因此,必须通过程序将各个字段的信息从缓存字节流中提取出来,将其转化成有实际意义的、可供高层决策使用的定位信息数据。同其他通信协议类似,根据帧结构利用LabView完成对RS232串口读入的GPS定位信息的提取。
串口信息读取的程序流程图如图2所示。串口初始化完成串口参数设置,包括串口号、数据位、停止位、奇偶校验位、数据流量控制和波特率等。根据串口缓冲区中的字符数来判断信号是否到达串口,即硬件电路是否正常。如果正常,则读串口数据。
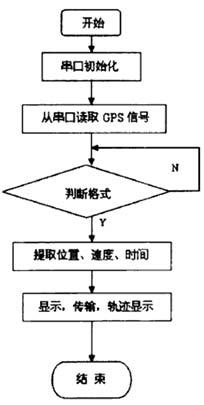
图2 串口信息读取的流程图
惯性测量单元通过数据采集卡采集的数据进入计算机的程序流程图如图3所示,首先从数据采集卡读入惯性测量单元采集的数据,进行初始对准、解算捷联矩阵初值,然后进行捷联矩阵更新,得到地理坐标系相对于惯性坐标系的旋转角度,考虑到陀螺的角速度输出,就可以计算出载体坐标系和地理坐标系之间的方向余弦矩阵。通过这个方向余弦矩阵的分解,便可以将加速度计的输出变为载体沿地理坐标系的加速度分量。然后,利用加速度的一般表达式,对有害加速度进行补偿,就得到载体沿地面的运动加速度;将其积分,就得到南北向、东西向的地速分量Va、Ve。有了地速分量,经过相应的变换,就得到经纬度的变化率;再对其积分,最终就得到载体瞬时位置的经度和纬度。再利用姿态矩阵的元素,提取姿态和方向信息。
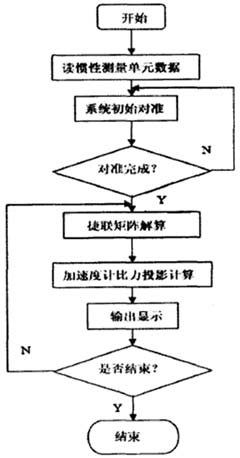
图3 惯性测量单元软件流程图
结束语
智能交通车载信息采集系统的实现,大大加快了智能交通系统相关技术的研究和开发,改善交通秩序、缓解交通拥挤,获得实时可靠的交通信息。将虚拟仪器技术应用于智能交通车载信息采集系统,不仅可以满足目前智能交通中多传感器信息的采集和融合的要求,最重要的是可以灵活的根据技术发展的需要进行功能扩展。所以,对于发展迅速的智能交通技术来说,这种基于虚拟仪器技术的信息采集系统具有十分现实的意义。 |
|





 /4
/4 






文章评论(0条评论)
登录后参与讨论