
利用A-GPS,接收器不必再下载和解碼来自GPS卫星的导航数据,因此可以有更多的时间和处理能力来追踪GPS讯号,这样能降低首次定位时间,增加灵敏度以及具有最大的可用性。<?XML:NAMESPACE PREFIX = O />
GPS是一种基于卫星的定位系统,它最初由美国军方设计并受美国军方的控制,可以为任何人免费使用。这个系统是由在6个环绕在环形轨道上的24颗卫星组成,一个卫星环绕轨道运转一周的时间接近12个小时。每个卫星不断地发送关于目前时间、所有卫星的位置以及像年历(almanac)和星历(ephemeris)等相关数据讯息。GPS接收器使用这种讯息来运算其自身与卫星之间的距离。为确定位置,GPS接收器必须接收来自至少三个卫星的讯号。
首次定位时间(TTFF)很大程度上决定于接收器的接收灵敏度,以及可见卫星的数量、每个卫星讯号的强度、卫星在天空中的分布以及接收器对天空的视角。在一种不利的环境中,如讯号较弱的城市高楼间隙或者室内,某些情况下需要几分钟的时间来运算位置。这对于本地服务(LBS)或者紧急呼叫(E911)来说是不可接受的,这些情况需要一种更快的获取时间。为此,人们开发了辅助型GPS(A-GPS)来解决不利环境下的TTFF问题。
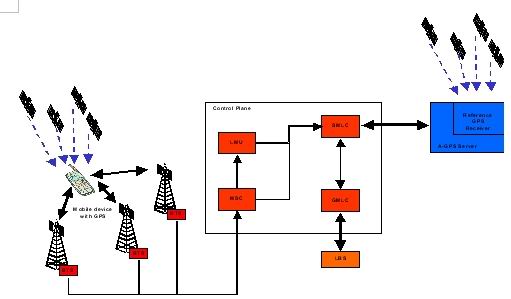
图1:控制层面上的A-GPS。
A-GPS
A-GPS的开发部份地受到美国联邦通讯委员会(FCC)的E911强制要求能对紧急呼叫者提供行动电话的定位所推动。A-GPS的目的是或者提高TTFF,或者当它不能提高TTFF时实现定位运算。
过去几年,在A-GPS这个关键词之下开发出了不同的概念和解决方案,其中很多是受专利保护的。这些不同的概念可以分成支持型GPS(aided GPS)和辅助型GPS两类(assisted GPS)。
1. 支援型GPS
支持型GPS透过在行动网络上发送年历、星历、粗略的位置和时间来提高TTFF。这种支持型数据可以在控制层面(control plane)上发送,或者行动网络的用户层面(user plane)上。位置的运算大多发生在行动设备上。
2. 辅助型GPS
辅助型GPS使得采用快速TTFF运算位置成为可能。为实现这点,利用像时间同步、更准确的位置、都卜勒和频率这样的额外讯息用来确定位置。这种额外讯息可以透过使用行动网络控制层面的基础设备来获得,像先进前向链路三边测量(AFLT)机制可用来确定行动设备的位置。这里,讯号从行动设备发出,几个行动基地台接收并进行测量。位置的运算可以在行动设备内发生(基于行动设备的),或者在行动网络服务器上(基于网络的)。
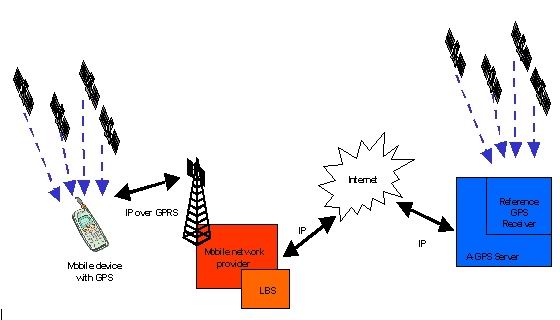
图2:用户层面上的A-GPS。
基于行动设备的辅助型GPS解决方案透过行动网络接收额外的辅助GPS数据,但是在行动设备上进行位置运算。这意味着LBS或者E911服务必须从行动设备得到目前的位置。
采用基于网络的辅助型GPS解决方案,行动设备发送原始的GPS数据到行动网络中的GPS辅助服务器。这个网络服务器可以利用直接来自网络的额外辅助GPS讯息来运算位置。在运算之后,位置数据被发送到接收器。LBS或者E911服务可以直接存取网络服务器的位置数据库。
A-GPS的好处是改善TTFF、增加灵敏性以及使可用性最大化,这些优点让接收器不再必须下载和译码来自GPS卫星的导航数据,接收器可以使用更多的时间和处理能力来追踪GPS讯号。
基于控制层面的A-GPS
控制层面方案利用无线网络的功能以及讯号发送层来从网络获取位置讯息,如蜂巢式ID、AFLT或者时间同步机制。
CDMA和GSM的蜂巢式扇区都针对控制层面A-GPS消息发送开发出了标准(分别为TIA/IS-801-1和3GPP TS25.331),定义了用户设备性能衡量标准(分别为TIA 916和3GPP TS 25.171)。这些标准描述了来自无线网络的位置讯息如何获取,以及这个讯息如何用于A-GPS。
当在控制层面上使用A-GPS时,定位测量单元利用在行动设备、几个收发器基地台和行动交换中心之间的测量讯号传输来获得位置讯息。服务行动定位中心收集这些基于网络的位置数据以及来自具有几个参考GPS接收器的A-GPS服务器的数据,将这种辅助数据发送到行动设备,使行动设备能运算出准确的位置。LBS可以透过网络网关行动定位中心来获取这个位置数据。
采用控制层面方法,基于网络或者基于行动设备系统的位置运算是可能的。基于控制层面的A-GPS系统安装非常复杂而成本很高,因为需要很多额外的硬件来处理复杂的协议,但是这样的A-GPS系统将具有位置运算的大部份好处。
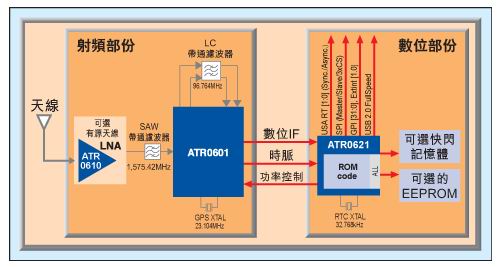
图3:ANTARIS 4结构图。
基于用户层面的A-GPS
用户层面方案是一种在A-GPS服务器和行动设备之间的通讯都基于全IP数据链接的A-GPS系统,与无线讯号层无关(基于GPRS的IP)。相关标准由开放式行动联盟(OMA)制订,称为安全用户层面定位(SUPL)。
当在用户层面上使用A-GPS时,带GPS接收器的行动设备在行动网络的用户层面上透过IP与A-GPS连接。A-GPS服务器从几个参考GPS接收器收集支持数据,如星历与年历。服务器根据要求发送这个数据到行动设备。行动设备的GPS接收器利用这个支持数据来进行位置运算。
LBS可以要求行动设备提供位置讯息,这些数据将透过IP连接发送。这种方法比透过控制层面的方法成本低,因为行动网络供货商对控制面不需要特别的硬件,而且这种方法对于所有的行动标准都是可以使用的。
GPS芯片组ANTARIS 4
以Atmel的GPS芯片组ANTARIS 4为例,该组件是与u-blox公司共同开发,内含射频接收器IC ATR0601、LNA ATR0610和基频IC ATR0621,由Atmel提供RF芯片/数字IC技术,u-blox提供GPS软件技术。
高增益低噪音放大器(LNA)使用了Atmel的SiGe技术设计用于GPS应用,具有1.6dB的噪音系数、高增益(>16dB)、低功率设计(<10mW)的特点,以及整合的上电控制和50Ω的输出匹配。
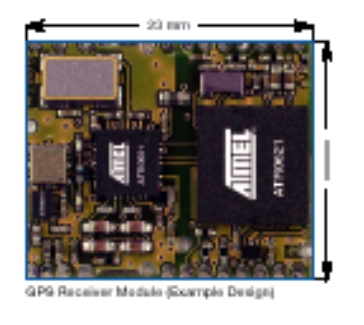
图4:GPS接收器模块。
GPS RF接收器IC具有优良的RF性能和小于6.8dB的噪音系数,对干扰不敏感,功耗小于40mW。它包括一个频率合成器、带自动增益控制(AGC)的中频放大器和1.5位的A/D转转器,采用了BiCMOS制程制造,接收器支持XTO和TXCO。外部必须使用一个SAW带通滤波器和一个分离的IF滤波器(96.764MHz)连接到RF接收器。
GPS基频处理器ATR0621包括一个16通道GPS相关器,该基频处理器采用ARM7TDMI处理器核心,具有128kB内部SRAM和384kB内部ROM,在这个ROM中包括全部的GPS韧体,由u-blox公司授权,用来执行基本的GPS处理,包括追踪、获取、导航和定位数据输出。对普通的PVT(位置/速度/时间)应用,不需要外部闪存或ROM。韧体支持在可选的外部EEPROM中储存可能的配置设置,对于特定的用户应用提供一套软件开发套件。基频具有不同的接口以方便灵活的系统整合(2个USART、USB 2.0、SPI、GPIO),而且透过不同的省电模式提供先进的功率管理。
导航的结果透过USART或者USB接口输出,使用内部NMEA(0183)协议或者u-blox公司的协议,后者具有增强的导航讯息和控制功能。
ANTARIS 4技术展现了在任何静态的和动态的环境下的强韧性能,包括像具有挑战性的大城市环境。在不影响导航准确性的情况下它能提供-158dB灵敏度、支持先进的WAAS/EGNOS、良好的获取性能(如34秒的冷启动时间)、优良的多径抑制、4Hz的刷新率、低功耗,而且使系统方案具有最低的材料成本。
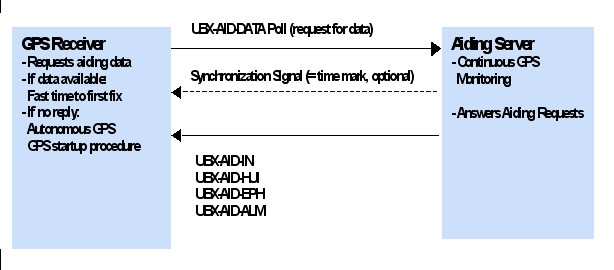
图5:ANTARIS 4支持的协议消息。
ANTARIS 4和A-GPS
ANTARIS芯片组对于需要立即的位置定位应用来说,如透过行动电话的E911紧急呼叫者定位,可提供没有等待的基于定位的服务或行动资产追踪。来自外部资源的辅助数据如辅助服务器则将第一次定位确定时间减少到4秒。辅助参数提供星历、年历、粗定位、频率漂移和时间、卫星状态,以及如果可能的话,提供一个精确的时间同步讯号。这种辅助数据提供了GPS接收器用于搜寻和追踪的关于卫星的实时讯息,以提高TTFF。
NTARIS 4的协议具有特殊消息用于A-GPS来与A-GPS服务器交换辅助数据。
辅助数据和时间同步将提高芯片组的性能将能得到提高,若没有辅助数据,冷启动一般TTFF为34秒;若没有时间同步,辅助型启动TTFF为15到20秒;而在时间同步优于8ms情况下,辅助型启动的TTFF时间一般为12秒;在时间同步优于400us情况下,辅助启动的TTFF时间一般为4秒。
同样,灵敏度从-142dBm提高到-145dBm,因为接收器可以执行重新获取过程。
本文总结:
采用A-GPS,像LBS和E911这样的新应用变得可行。使用辅助数据可以实现微弱讯号的快速获取,可以推动导航解决方案,否则导航方案将不可能实现。对于A-GPS来说,技术已经是现成的,应用时机已经来临。在行动网络端有两种可用的方法:用户层面上的A-GPS适合低成本和快速整合,基于控制层面的A-GPS适合于提供最佳的性能。
作者:Stefan Lux GPS应用工程师 Atmel公司







 /1
/1 






文章评论(0条评论)
登录后参与讨论