
iMX6ULL应用笔记接口篇主要适用于飞凌 OKMX6ULL-S 平台 Linux4.1.15 操作系统,主要讲解iMX6ULL系列产品接口的一些DEMO测试例程,
一、SPI 接口6ull 最多可以支持 4 路原生的 spi 接口,分别为:
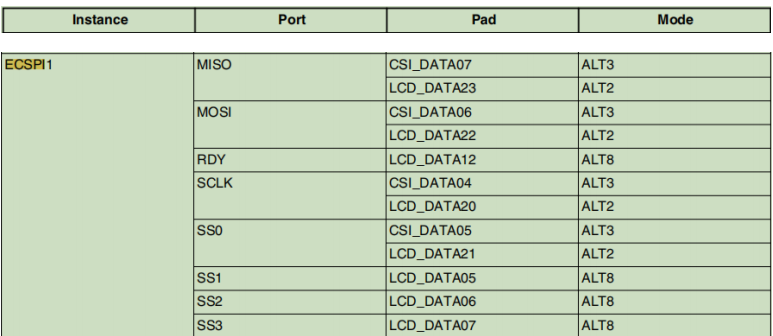
其中第一列为接口号,第二列为功能,第三列为可以复用此功能的引脚名称,第四列为引脚的模式。
下面以添加 ecspi1 为例进行添加和测试:
1、从上表中选取 ecspi1 的 4 组引脚,其中 MISO 采用 CSI_DATA07,MOSI 采用 CSI_DATA06,SCLK
采用 CSI_DATA04,SS0 采用 CSI_DATA05。
2、在对应的设备树文件/arch/arm/boot/dts/imx6ull-14x14-evk.dts 中添加 ecspi1 节点。
&ecspi1 {
compatible = "fsl,imx51-ecspi";
fsl,spi-num-chipselects = <1>;
cs-gpios = <&gpio4 26 0>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_ecspi1>,<&pinctrl_ecspi1_cs>;
status = "okay";
spidev@0{
compatible = "spidev";
spi-max-frequency = <20000000>;
reg = <0>;
status = "okay";
};
}
3、在&iomuxc 节点下添加 pinctrl_ecspi1 和 pinctrl_ecspi1_cs
pinctrl_ecspi1: ecspi1grp {
fsl,pins = <
MX6UL_PAD_CSI_DATA07__ECSPI1_MISO 0x100b1
MX6UL_PAD_CSI_DATA06__ECSPI1_MOSI 0x100b1
MX6UL_PAD_CSI_DATA04__ECSPI1_SCLK 0x100b1
>;
};
pinctrl_ecspi1_cs: ecspi1_csgrp {
fsl,pins = <
MX6UL_PAD_CSI_DATA05__GPIO4_IO26 0x80000000
>;
};
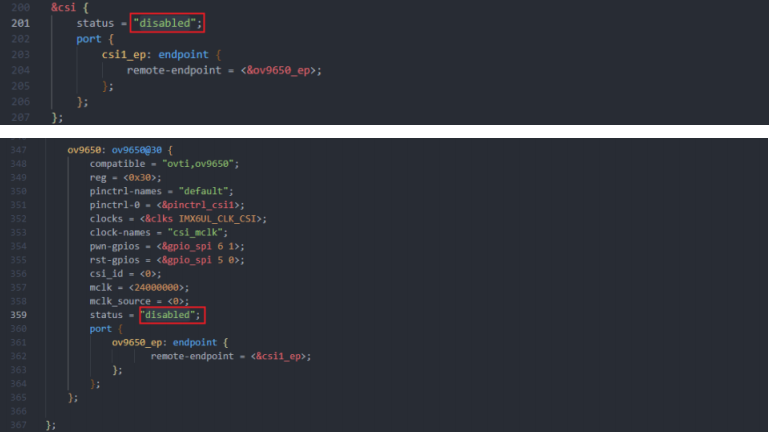
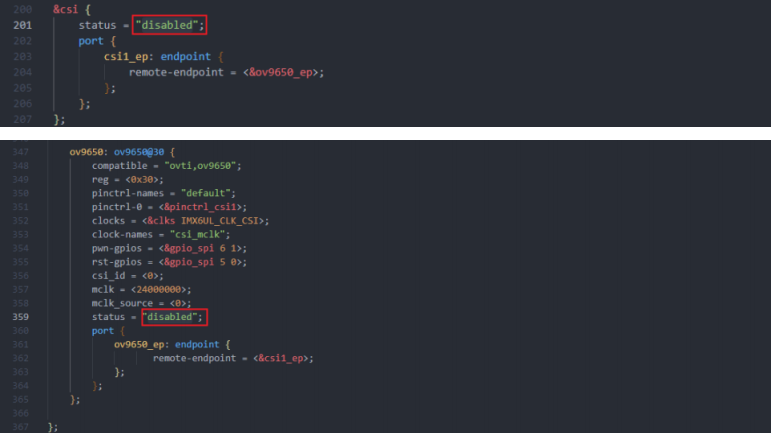
4、把之前的 csi 功能关闭,避免引脚复用冲突
5、根据用户编译手册中的方法编译设备树后替换之前的.dtb 文件,重新烧录。
6、重新启动开发板,查看/dev 目录下是否生成 spidev0.0 节点,如果生成说明添加 ecspi1 成功。
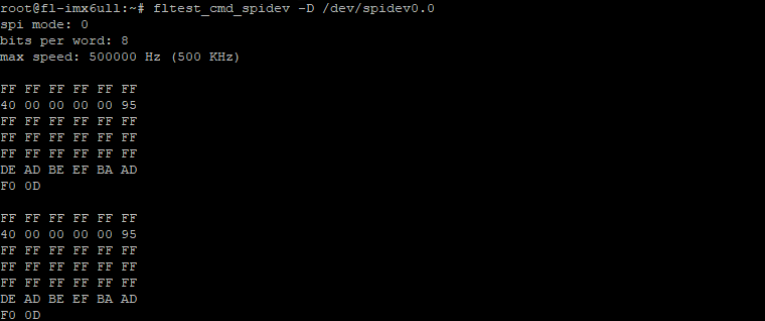
7、此处只是进行短接 miso 和 mosi 进行的测试,运行 fltest_cmd_spidev -D /dev/spidev0.0
二、SPI 转 CAN 接口
SPI 转 CAN 模块采用的是 mcp2515 芯片,linux4.1.15 内核版本,默认没有配置此芯片的驱动
1、添加 mcp2515 驱动
在配置文件 imx6ull_defconfig(arch/arm/configs/imx6ull_defconfig)文件中设置
CONFIG_CAN_MCP251X=y

2、配置设备树
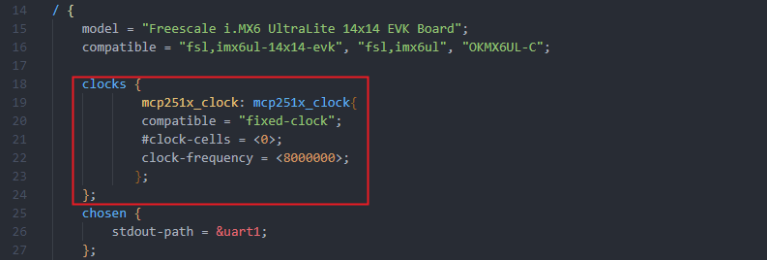
在设备树根节点下添加 clocks 节点
3、参考应用笔记中的“SPI 接口”,添加 ecspi2,并将其中的 spidev 设备改为 can0:mcp2515
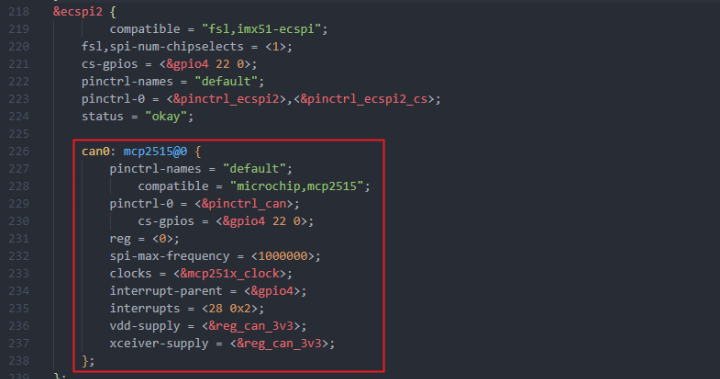
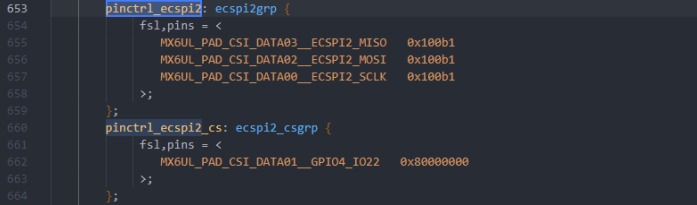
添加 pinctrl_ecspi2、pinctrl_ecspi2_cs 和 pinctrl_can 配置

4、把之前的 csi 功能关闭,避免引脚复用冲突
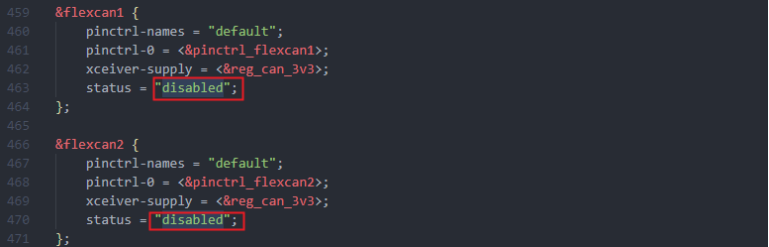
5、把原生的 flexcan1 和 flexcan2 屏蔽掉
6、重新编译内核和设备树,重新烧写。
7、此 ecspi2 驱动加载成功后,cat /sys/bus/spi/devices/spi1.0/modalias 会出现 spi:mcp2515
8、ifconfig 查看会有 can0 节点。可以参考“用户使用手册”FlexCAN 设备章节进行测试





 /4
/4 






文章评论(0条评论)
登录后参与讨论