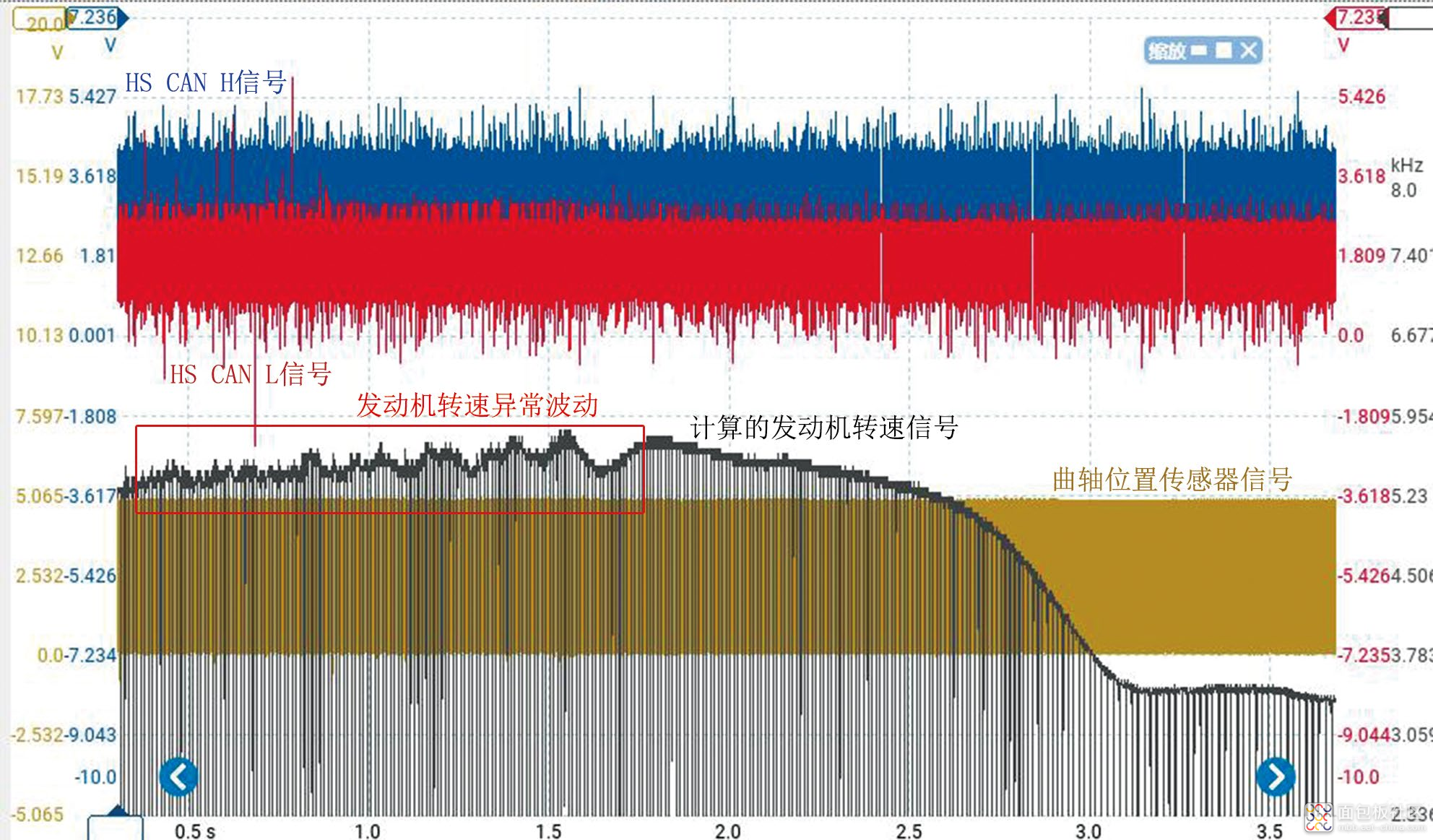
故障现象 一辆 2013款路虎极光车,搭载2.0T发动机(型号为204PT)和6速自动变速器(型号为爱信AWF21),累计行驶里程约为13万km。车主反映,该车行驶中加速偶尔发闯,且组合仪表上提示“变速箱故障”。 故障诊断 接车后原地试车,发动机起动、怠速及加速均正常。用故障检测仪检测,发现发动机控制模块( ECM)中存储有故障代码“B1087-00 LIN总线A 待定”,换挡模块(GSM)中存储有故障代码“U0291-00 与换挡模块B(GSMB)的通信中断间歇”,GSMB中存储有故障代码“U3003-22 蓄电池电压间歇”“U0401-82 接收到来自ECM的无效数据间歇”“U0404-82 接收到来自GSM的无效数据间歇”“U0402-82 接收到来自变速器控制模块(TCM)的无效数据间歇”“U0415-82 接收到来自制动防抱死控制模块(ABS)的无效数据间歇”,TCM中无故障代码存储。清除故障代码后路试,故障出现时上述故障代码会再现。查看维修资料得知,GSM、GSMB、ABS、TCM及ECM等通过HS CAN总线进行通信,怀疑HS CAN总线通信偶尔异常。 连接虹科 Pico汽车示波器进行路试,测得故障出现时的相关波形如图1所示,可以看到,加速时发动机转速波动明显,松开加速踏板后发动机转速平稳下降;分析HS CAN H和HS CAN L的电压信号,无明显异常,且译码也无明显异常,排除HS CAN总线发生短路、断路的可能。 图 1 故障出现时的相关波形 继续路试,发现故障出现时松开加速踏板, GSMB 的供电会升高至16.31 V(图2),随后稳定为14.99 V,异常 图 2 GSMB的供电异常升高 对发电机的 LIN信号进行译码,发现故障出现时LIN信号有数据丢失;进一步检查发现,LIN信号无应答时出现的干扰与点火信号同步(图3),由此怀疑故障可能是由点火干扰引起的。 图 3 LIN信号上的干扰与点火信号同步 故障排除 拆检火花塞,发现 4个火花塞的电极均烧蚀严重。更换火花塞后反复路试,故障未再出现,故障排除。测得正常加速时的相关波形如图4 所示。 图 4 正常加速时的相关波形 故障总结 由于火花塞的电极烧蚀严重,在加速、大负荷工况下,发动机点火异常,气缸工作不良,使发动机转速波动较大,导致车辆行驶发闯;同时异常点火产生的电磁干扰过大,影响到了控制发电机的 LIN信号,使发电电压升高;当发电电压至16 V左右时,出于保护GSM和GSMB进行重启,从而短暂失去通信。 案例作者:李裕成 现任上海欣车汇豪车诊断中心主修技师,兼 Tech Gear汽车诊断学院实训老师,擅长汽车波形诊断技术,赢得众多豪华车车主的认可。



 标签: can总线
标签: can总线