
你必须要知道风险的根源
因为现在的中国已进入了汽车社会,年轻人或迟或早会有自己的车,而每台车上都用CAN总线在控制刹车、转向…,所以你要知道CAN的风险。我对CAN总线的出错漏检率的分析最近又进了一步:发现了Bocsh的数据为什么会错。我想这篇博客在你需要打官司时对你是一定是有用的证词。
Bocsh的数据是25年前(1990)的一篇报告中给出的,虽经这么长时间,他一直在引用其结论。
下面的讨论带一点学术性,不过我尽量讲得科普些。
一个帧传送中数据是否出了错,要有检验机制,在CAN中这是由随着帧一起送的CRC校验和进行的:发送方按自己送出的数据一起送校验和,接收方按收到的数据算出校验和,如果数据有错,校验和就对不上了,接收方可以丢弃这个错误的数据,等待重发的真的有效数据。可是如果CRC校验失效,错的数据就会被收下并经过控制机构执行,比如当你减速的时候,经CAN传送的命令被解释为加速,是否可怕?
不幸的是CAN总线的CRC校验确实存在这样的漏洞,其原因是CAN的帧中有一种填充位规则,每传送5个相同的位值必须填充一个相反的位值:接收方见到5个相同的位值必须删去一个相反的位值。这是为了避免太长的相同位序列造成同步的困难。如果接收方发现有6个相同的位值,就表示出错了,就会报错等待重发。可是如果这5个相同位发送中有一位出了错,接收方就收不到5个连续相同位,就不执行填充位规则;或者发送方没有5个连续相同位,不执行填充,但是由于传送中有一位错而接收方见到了5个连续相同位,它就执行删除操作。这种不对称执行填充位规则造成了收发双方数据的移位,将它们位对位逐位比较,就可能发现出了大量的错。
这些大量的错在某些条件下会使CRC校验失效,Bocsh发现了这种失效机制,他的文章就是评估究竟会造成多大的错帧漏检率,他的最终结论是Pun=4.7*10-11。暂不说这个数据对安全是否够,这个数据是大大低估了,我求得的是Pun=1.37*10-7。
Bocsh把这种可能出错的数据流称为critical sequence,然后通过大量随机的搜索来找这种序列(CS),在找的过程中找规律,其中找到的规律是二条:对于有二位错构成的CS漏检的比率为constk=4.5*10-7;CS在数据域与CRC域内出现的多次引起贡献量的修正值是Estuff(L)=0.5~1.4。他把每一种长度(L)不同的CS对错帧漏检率的贡献都看作一样,然后再在长度范围内求和,得到总的错帧漏检率。
那么这种方法错在那里?我再三细读了文章,发现了他们工作失误的原因。为了说明的方便,我把文章的部分内容截图如下:(根据我国2001年版著作权法第二十二条第二款,我这是合理使用:为介绍、评论某一作品或者说明某一问题,在作品中适当引用他人已经发表的作品。)
因为没有从根本机理上进行分析,所以就导致归纳上的错误,从截图上可以见到长度的范围为30~80bit。这一限定就把许多短的CS排除在外了,例如长度23~29的CS是非常主要的错帧漏检实例的贡献者。CS的长度越短,贡献越大,这有二方面的原因,一是特定CS实例在L长的所有可能位流中占的比率是与长度有关的,一个23位CS实例占的比率是2-23,而一个30位实例占的比率是2-30,也就是讲,一个23位长度CS实例对漏检的贡献是一个30位实例CS对漏检的贡献的128倍;其次,CS可以在64位数据域与15位CRC域中存在在任何地方,一个23位的CS可出现的位置有57种,而一个30位的CS可能出现的位置有50种。所以Bocsh的数据漏掉了主要贡献者,拣了芝麻,丢了西瓜。
其次归纳上的错误还表现在Estuff(L)上。因为CS漏检的根本机理是:特定位出错后,收发位流的移相造成的误差流是CRC生成多项式的倍数,而与一帧中出现填充位的概率是无关的。Estuff(L)是对实例数的一种修正,就像上段所讲同一CS可以在不同位置上,所以Estuff(L)是低估许多了。对于CS长度为30~80的实例发生在特定位置时,漏检的比率与我的推导是一致的,即15*2-25=4.47*10-7~Bocsh的constk,但由于Estuff(L)的低估,造成Bocsh在CS长度为30~80时漏检率有很大低估。
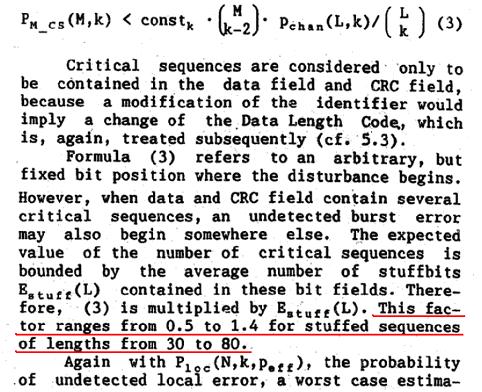
图1. Bosch 文章中限定CS长度的部分
有兴趣的读者可以详读本博可下载文章Residual Error Rate of CAN FD中的附录。
那么在应用上添加额外的CRC检验是否有用?分为二种情况讨论:
第1是只有一个接收节点要用此数据。此时附加的CRC检验可以查出错。但是没有新的正确的数据来刷新,就看应用的时限容许不容许。有些控制系统设计比较鲁棒,丢一个数据没关系。但是这种情况下不能再有其他故障,例如使新的有效数据迟迟来不了的情况。不幸的是,CAN有一种消极报错状态时的等效离线状态,它可以产生几十到上百ms的等效离线,此时节点总在报错状态,既不能收,也不能发,那来新的正确的数据?
第2是一个数据要被多个节点用,比如新能源车的4轮驱动,它们要同步加速,如果添加附加CRC检验后一个轮子发现错了不加速,那么车就转向了:因为控制系统的安全设计是在丢包后最合理的估计值是原来的数据,而原来值在红灯时是停止,三个轮子加速,一个轮子停止就转圈了,会有转到逆向车道可能。此时除了第一种情况下的问题外,节点间又有不同步安全风险。
所以在应用层添加额外CRC检验是不得已的方法,要证明有效是很难做到的,你能证明不发生等效离线吗?你能证明不同步没关系吗?
有车的各位请在4S点维修时请留意有没有CAN通信的故障记录,例如我以前博文中讨论VW的DSG故障时提到过的一些,发动机也有(详细请有关的维修专家补充)。换档时大的响声,很可能是发动机与离合器动作没协调,而不协调的原因是CAN通信出了错,然后又重发刷新了,这个错短于250m时还不会记下来。如果有记录,表明你的车干扰大,CAN错帧漏检与等效离线隐患发作的风险正在加大,就一定要保留证据,以便不时之需。
CAN FD正在升温,我对它的错帧漏检率进行了分析,作为可下载文件附在后面,对CAN2.0的分析作为该文附录。这篇文章很长(45页),恐怕看的人很少了,ISO TC22的CAN专家们告诉我,他们正在研究这篇文章,希望有志将来为中国发出声音的年轻人不要错过这件事,你们可以与专家门同步研究这篇文章。真是谢谢互联网,通信和下载省去了许多繁文缛节。
用户1406868 2014-12-11 11:05
yfy812_845263591 2014-9-23 15:59
用户1705448 2014-9-23 13:21
yfy812_845263591 2014-9-23 11:12
用户1678053 2014-9-23 09:42
看看
用户1643390 2014-9-23 09:07
用户594398 2014-9-23 07:38
用户1602177 2014-9-22 15:46