
· TJA1043是一个CAN收发器,位于CAN控制器和BUS之间。
· 支持CAN FD。在CAN FD模式下,速率可达5Mbit/s。
· 支持12V和24V系统。
· 两种封装。SO14和HVSON14。
二: Pin定义· VCC:给Transimt供电。电压范围4.5~5.5V。
· VIO: 给I/O口供电。电压2.8~5.5V。此Pin需要和MCU共用电源。这样TXD,RXD,STB_N,EN,ERR_N会和MCU有同样的逻辑电平。
· Vbat:直接连接在电池上。当整个系统都处于休眠状态,只有CAN内部一小部分活着。为了下一次的wake up。Vbat就是在此种状态下,CAN中仍旧活着的那一小部分供电。
· GND
· TXD: 这是一根信号输入pin。
· RXD: 这是一根信号输出pin。
· CANH/L: BUS信号
· EN:使能输入pin
· INH:输出pin。控制DUT上电源模块使能。
· ERR_N:输出pin。作为Error或者power on指示pin,active电压是L。
· WAKE:本地唤醒输入pin。此pin是输入pin。它即可以侦测信号从H到L的变化,也可以侦测信号从L到H的变化。当侦测到有电平转换,即意味着CAN要被唤醒。为了更好的EMI性能,建议此pin连接到VBAT 或者GND。
· STB_N:Standby 输入pin,active电压是L。
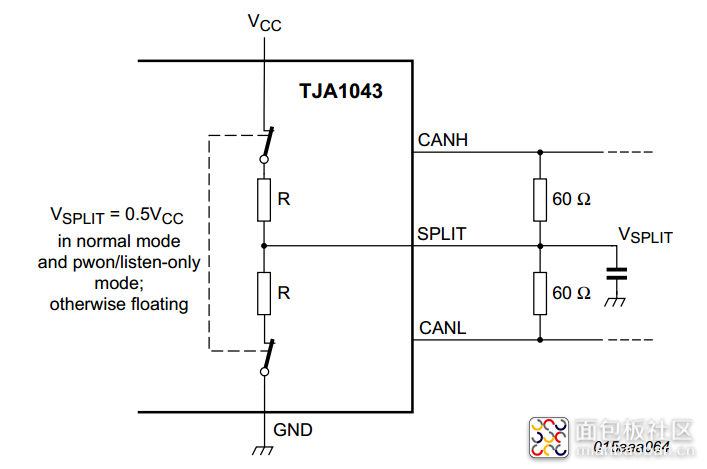
· SPLIT:共模稳定输出pin。此pin连接到分离电阻终端网络,可以稳定BUS上的隐性电压。通过一个DC泄漏到GND,可以降低EME(电磁辐射)。在Normal和Listen only mode,此pin输出一个0.5VCC的直流电压。在其他三种模式下,它是floating的 。
VCC=4.5~5.5V
VIO=2.8~5.5V
2. 耗电
(1) 针对VCC
正常工作时,耗电最大值是65mA
处于Listen only时,耗电最大9mA。
Standby 或者sleep状态时,耗电最大2uA。
(2) 针对VIO
工作时,耗电最大500uA
Standby或者休眠模式时,耗电最大4uA。
四:工作模式
在此模式下,1043通过CANH 和CANL接收或者发送数据。接收到的模拟差分信号,会被转换成数字信号通过RXD输出。
BUS pin上有偏置电压,其值是0.5VCC,即2.5V。原因是1043的Ri造成。Ri是1043的输入阻抗。1043的单端输入阻抗是9Kohm,15Kohm,28Kohm。其差分阻抗是19Kohm,30Kohm,52Kohm。
INH一直是H。即相关的电源都是打开的。
2. Listen only mode
在此模式下,1043的输出功能是disable的。仅仅只有接收功能。仍旧会将CAN BUS上的数据通过RXD输出到MCU。
仍旧还有0.5VCC的偏置,INH也还是H。
3.Standby mode
这是一种省电模式。1043既不输出数据,也不接收数据。1043的low power receiver被激活去监控bus。
BUS的偏置位于GND level。INH仍旧为H,即有其控制的相关电源仍旧打开着。
RXD和ERR_N将映射出任何的wake up需求。需要提供VIO和VBAT。
4. Go to sleep mode
此模式是进入sleep mode的一个过渡阶段。在此模式下,1043的行为像standby模式,同时有go to sleep命令被传输到1043.
在进入完全sleep mode之前,1043将处于go to sleep mode若干时间,此时间称为Th(min),即the Minimum hold time。
在此时间之前,如果STB_N或者EN改变,或者wake flag被设置,则1043不会进入go to sleep mode。
5. Sleep mode
需要通过go to sleep mode进入sleep mode,并且在相关电压(VCC活VIO)恢复之前,侦测到VCC or VIO处于欠压已经一段时间了。
在此模式下,1043行为和standby一致,只是INH被设置为floating。所有INH控制的电源都处于off状态。进入Vbat的电流将被减低到最小。
通过STB_N,EN和wake flag可以将node唤醒从sleep mode。
五:2种wake up方式
1. Local wakeup
* 1043在standby or sleep模式下,可以通过侦测CAN BUS上一组特殊的wake up pattern,唤醒自己。
* 这个测试pattern在ISO11898-5:2007中有定义。
* 有滤波器可以帮忙滤除假的wake up pattern。这些假的pattern是由于BUS上的噪声和毛刺引起的。
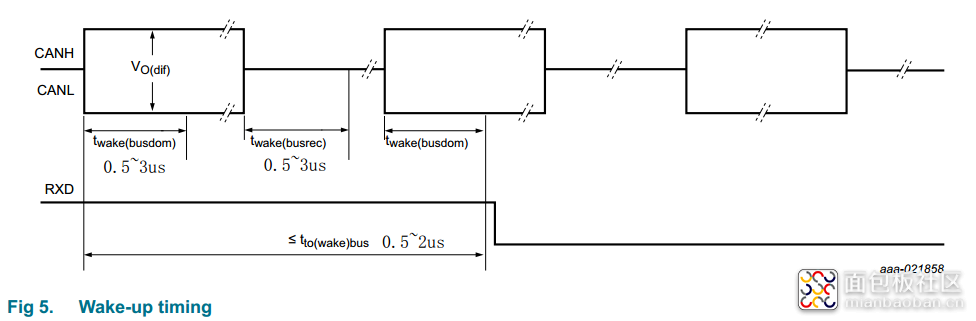
* 测试Pattern有三部分组成:
· 一份显性信号,至少持续Twake(busdom)
· 一份隐性信号,至少持续Twake(busrec)
· 一份显性信号,至少持续Twake(busdom)
· 无论显性信号,还是隐性信号,只要时间短于上面的时间需求,都会被忽略。
* 完整的三段信号必须在Tto(wake)bus时间之内被接收并且识别。否则内部的wake up逻辑会被复位。接收到的完整的wake up pattern将会触发wake up事件。注意:RXD pin一直保持高,直到wake up事件被触发,才会变L。
六:Local failures
1043能侦测到4中local failure情况,同时会设置local failures flag。而且大多数情况下,1043的输出会被disable。
1. TXD dominant 超时
由于HW或者SW应用出错,导致在TXD pin上出现永久的L level,这将驱动CAN BUS进入永久的显性阶段,锁住整个网络通信。
TXD dominant time out 功能就是:当TXD保持L电平超过Tto(dom)TXD时,去disable 发射机,阻止网络被锁。发射机会持续disable,直到local failure flag被清除。
2. TXD to RXD 短路侦测
当RXD pin和TXD pin之间短路时,一旦bus被驱动为显性,整个bus都会被锁在永久的显性状态。原因是RXD的低边驱动能力一般都强于TXD的高边驱动能力。
当出现此种短路时,发射机会被disable。直到local failure flag被清除。
3.Bus 显性超时
当CAN BUS短路到VBAT、VCC或者GND,或者网络上其他节点出现fail,都会导致一个差分电压出现在BUS上,进而导致BUS处于显性状态。
当BUS处于显性状态,会导致任何一个node不能开始传输。一般的BUS failure detection不能侦测到这种失败,但是bus dominant clamping(固定住)detection可以侦测到此种失败。
当BUS处于显性状态超过Tto(dom)bus,local failure flag会被设置。通过检测此flag,控制器可以确定是否有一个钳位bus将网络通信锁住。不需要去disable发射机。
注意:local failure flag不能保持此种bus显性clamping failure,同时会尽快让BUS回到隐性阶段。
4. 过温测试
当结温变的很大,1043将shut down去保护输出设备。
1043将一直处于disable状态,直到此local failure flag被清除。
作者: 李晓晶, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-1661678.html
版权声明:本文为博主原创,未经本人允许,禁止转载!






curton 2019-9-11 20:50