首页
论坛
电子技术基础
模拟技术
可编程器件
嵌入式系统与MCU
工程师职场
最新帖子
问答
版主申请
每月抽奖
商城免费换礼
社区有奖活动
博客
下载
评测
视频
文库
芯语
资源
2025泰克杭州测试论坛
2025中国低空经济产业创新发展大会
【直播】芯片设计工艺仿真全解析
西门子数字化工业软件资源中心
嵌入式设计资源库
智能楼宇/家电控制应用全解析
在线研讨会
EE直播间
小测验
白皮书
行业及技术活动
杂志免费订阅
免费在线工具
厂商资源中心
论坛
博文
电子工程专辑
电子技术设计
国际电子商情
资料
白皮书
研讨会
芯语
文库
登录|注册
登录
用户1777698
修改
文章:
90
阅读:
142354
评论:
90
赞:
1715
好友
私信
个人主页
文章
90
原创
0
阅读
142354
评论
90
赞
1715
原创
工业机器人如何校正各臂的水平与垂直?
2016-4-28 16:48
1762
20
20
分类:
机器人/ AI
在机器人的制造过程中,最后装配完成后必须来校正它的水平垂直,以次来定程序的参考点,目前各家企业有哪些方法,哪种更靠谱一些?
来看看工业机器人达人知乎网友@韩峰涛是怎么说的:
在多数工业机器人应用中,示教再现的编程方式仍然占据主流,这要求机器人具有较好的重复定位精度(Pose Repeatability),对其绝对定位精度则要求不高;
随着机器人应用范围的增加,越来越多的应用中要求机器具有较高的操作空间绝对定位精度,比如带视觉的系统,机器人需要根据视觉系统判断出的物体位置并准确到达目标点,考验的是机器人的绝对定位精度。
标定机械零点是提高机器人操作空间定位精度(Pose Accuracy & Linear Path Accuracy)的第一步,其目的是为了让控制算法中的理论零点与实际机械零点重合,使得机械连杆系统可以正确的反应控制系统的位置指令。(机械零点只是提高机器人定位精度的一个基础因素,其他因素可参考 工业机器人控制算法的评价方法(CPA)? - 韩峰涛的回答)
零点丢失时,机器人无法正确的执行笛卡尔空间运动。
一般在下述情况下,需要重新标定零点:
更换电机/减速器等传动部件或者机械零部件之后;
与工件或环境发生碰撞;
没在控制器控制下,手动移动机器人关节;
目前主流的工业机器人标定方法主要有以下几种:
侧倾仪(代表厂商:ABB)
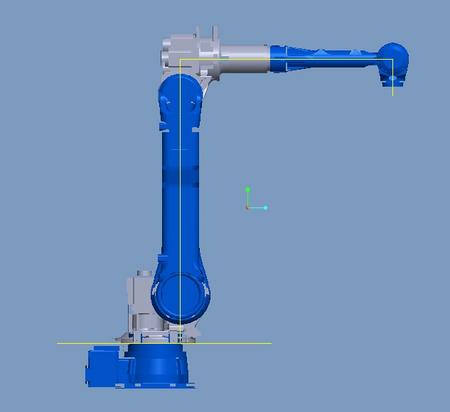
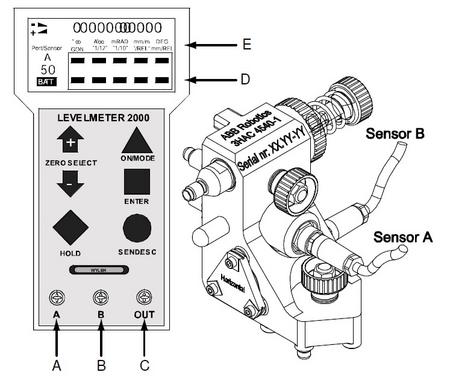
当更换了电机、减速器等驱动和传动部件时,ABB会要求使用Calibration Pendulum和Levelmeter 2000套件(图1)对机器人进行重新标定,该套件多由ABB售后部门和集成商使用,普通客户一般只需执行示教器上的Updating revolution counters(更新转数计数器)操作,而该操作需要的内部数据,就是由侧倾仪标定产生的。侧倾仪本质上是两个侧倾传感器(瑞士WYLER公司出品,http://www.wylerag.com/en/products/inclination-measuring-sensors/digital-inclination-sensors/inclination-sensor-zerotronic/),ABB做了一个支架,将两个侧倾传感器集成到一个仪器内,来实现同时测量两个方向的倾角。一般在ABB机器人的大臂或者小臂上会找到一个光滑的安装面(IRB120,IRB1200等小负载机器人除外),就是用来安装侧倾仪的。对侧倾仪具体使用方法感兴趣的朋友可以参考ABB的《Operating manual – Calibration Pendulum》。
图1 ABB零点标定套装
图2 底座上使用侧倾仪
图3 大臂上使用侧倾仪
图4 输出法兰上使用侧倾仪
优点:
精度高,由于不同纬度重力加速度不同,WYLER的侧倾传感器在使用时都会要求执行回零操作。
操作简单,在ABB的控制系统中内置了与之配合的程序(Service Routine),用户只需要将侧倾仪安装到位,调用内置程序,就会自动完成回零标定。
缺点:
贵,WYLER单个侧倾传感器+LevelMeter2000约6-8w,ABB整套套件需20w+(几年前的价格,仅供参考)。
繁琐,只要更换电机或者减速器,就需要进行零点标定。
EMD(代表厂商:KUKA)
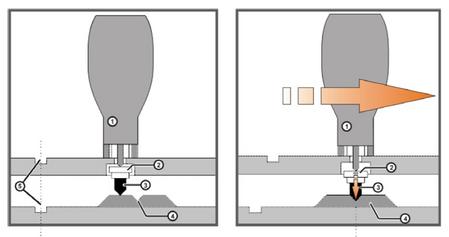
KUKA用于零点标定的设备叫EMD(Electronic Mastering Device,以前也称作EMT,从KRC4升级了),其本质上是一个高精度的位移传感器(图5)。
KUKA在机械本体上的每一个轴上都有一对大的凹槽以及一个圆孔及对应的尖型凹槽。标定时,首先利用大的凹槽进行粗定位,然后将EMD安装到圆孔上,另一端连接到KUKA的控制柜上,此时控制器会自动控制机器人以非常慢的速度运动,来寻找运动过程的最低点,也就是机械零点。具体操作过程可参考视频https://www.youtube.com/watch?v=6TVe965SPPA。
图5 KUKA EMD
图6 KUKA EMD零点标定示意图
优点:
操作简单,可靠,零点信息保存在关节上,换了电机/减速器也可以用EMD来标定。
成本较低,普通用户也可自备一套,随时可以进行校准。
在不购买EMD的情况下,也可用千分表代替,此时需人工读数判断零点。
缺点:
零点信息都保存在机械件上,对加工的精度要求非常高。
如果用千分表代替EMD,则无法实现自动寻找零点的功能。
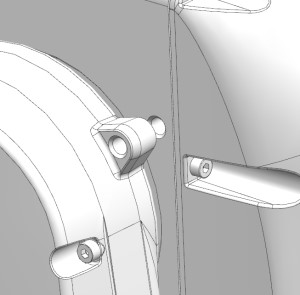
定位销、键、凹槽(日系厂商,国内厂商)
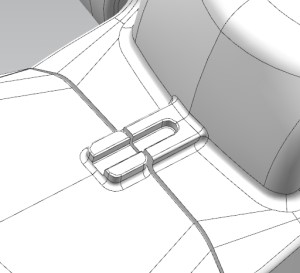
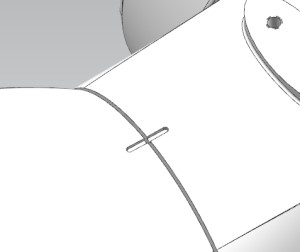
在机械装配中,经常采用定位销与键来确定不同零部件之间的相对位置,而在简单的机器人零点标定中,也可采用这两种方式来限定不同构件之间的初始位置。如图7所示,在关节相互转动的两个构件上各有一个销钉孔,当转动关节至两个销钉孔轴线重合时,销钉即可插入,此位置即为相应关节的零点位置。而对于键定位可参照图8,在关节相互转动的两个构件上各有一个键槽,当转动关节至两个键槽对应面重合时,键可同时放入两个键槽,此位置即为相应关节的零点位置。
而采用凹槽方式进行零点标定时,只需将两个凹槽对准即可认为已到达零点位置(图9),该方法属粗定位,仅用于对机器人绝对定位精度要求不高的场合。
图7 零点标定—定位销
图8 零点标定—键
图9 零点标定—凹槽
优点:
加工简单,成本低,操作方便
缺点:
精度差
机器人
传感器
工业机器人
写原创有奖励!2025面包板原创奖励正在进行中
最新发表
推荐阅读
明星博主
原创博文
年度排行
博文排行
博文评论
FPGA/CPLD
MCU/ 嵌入式
模拟
电源/新能源
测试测量
通信
智能手机
处理器与DSP
PCB
汽车电子
消费电子
智能硬件
物联网
软件与OS
采购与分销
供应链管理
工程师职场
EDA/ IP/ 设计与制造
无人机
机器人/ AI
医疗电子
工业电子
管理
写博文
点赞(
20
)
收藏
分享到:
上一篇:
浅析工业机器人的五大常见应用领域
下一篇:
机器人来了,关于机器人未来的五个预测
PARTNER CONTENT
换一换>
更多>
文章评论
(
0
条评论)
登录
后参与讨论
您需要登录后才可以评论
登录
|
立即注册
发布
用户1777698
修改
文章:
90
阅读:
142354
评论:
90
赞:
1715
好友
私信
个人主页
文章
90
原创
0
阅读
142354
评论
90
赞
1715
最新评论
更多
用户1750507013618 : //islamabadibabes.online/call-girls-in-islamabads/ //islamabadibabes.online/ //ourislamabadcall ...
用户1750712 ...
评论博文
2025-6-24
老挂钟,再修理,再失败
呵呵,还有一类人潜意识似乎于情于法都无所谓,又是什么道理呢? 不管什么道理,新人类会不会也是三类典型类别? 莫非这才叫 ...
自做自受 ...
评论博文
2025-6-23
不能评论,就在此说说
再看看,再说说,这插座还在继续使用着
自做自受 ...
评论博文
2025-6-23
【创客】创客看创客 其道和其名 ...
最新
博文
CAN 接口开发详解:原理、接口设计与 ...
OCAD应用:四组元连续变焦系统 ...
OCAD应用:三组元连续变焦系统 ...
资料下载
本周热帖
干货权威!混合信号PCB布局设计的基本 ...
权威资料!如何为半导体测试仪选择__ ...
milkv温湿度计代码
户外定位:RTK和GPS有多大区别?.pdf ...
干货!ESD静电防护设计的前因后果.pdf ...
什么是共模抑制比?
【富芮坤FR3068x-C】+经典蓝牙音乐A2D ...
《7天造一台无人机》启蒙宝典 ...
SFP Cage及其配件的二三事
高频高效的关键:MDD快恢复整流器在开 ...
最新资讯
芯语最新
FPGA四十载:可编程硬件的技术跃迁与A ...
美国计划撤销半导体豁免政策,涉及台 ...
工业电池充电器的PFC级拓扑对比:升压 ...
半导体晶圆厂全球布局及产能盘点(下) ...
一个简单的电路,让您更准确地表征JFE ...
重磅!中国长安汽车集团已更名! ...
Wi-Fi 8已在路上,企业级应用将爆发 ...
碳化硅巨头Wolfspeed官宣:破产重组 ...
明日召开!恩捷、赣锋、光华、天华、 ...
新恒和半导体装备产业园项目开工 ...
EE直播间
更多
Keysight World Tech Day 线上直播-AI 驱动的超高速传输测试分论坛
直播时间: 06月26日 13:30
材料介电常数的精确表征和测试
直播时间: 07月03日 10:00
在线研讨会
更多
Mercury基于展频技术的医疗时钟EMI抑制方案
AI 巨型芯片,性能越强,测试越难,如何破局?
利用先进精密仪器仪表解决方案,优化研发并加快产品上市
ST 在大功率热管理系统中的电机控制系统方案(AI 数据中心/暖通空调/电池储能系统/变频制冷)
热门
推荐
TI 创新技术搞定汽车的眼睛和耳朵
自动驾驶的半导体基石
TI 汽车ADAS全域方案解密
未来科技大揭秘:物联网、电动汽车、人工智能,谁将引领下一个十年?
我要评论
0
20
分享到微信
分享到微博
分享到QQ
点击右上角,分享到朋友圈
我知道啦
请使用浏览器分享功能
我知道啦
关闭
站长推荐
/4
2025第1期拆解活动:赢示波器、运动相机、热像仪等!
示波器、影石运动全景相机、大疆无人机、高清红外热成像仪;树莓派5等等
【下载】电源设计工程师指南(共542页)
本书共542页,深受设计工程师欢迎,作为硅基与第三代半导体的实用工具书,本手册将成为专业技术人员实现优化功率和小信号开关、电源转换和管理的必备指南。
【2025面包板社区内容狂欢节】发帖/回帖赢25万E币!
活动时间:即日起——2025年全年(发完20万E币为止!)
社区内容发布、审核与管理!
严厉打击刷流量发广告等行为
首页
论坛
电子技术基础
模拟技术
可编程器件
嵌入式系统与MCU
工程师职场
最新帖子
问答
版主申请
每月抽奖
商城免费换礼
社区有奖活动
博客
下载
评测
视频
文库
芯语
资源
2025泰克杭州测试论坛
2025中国低空经济产业创新发展大会
【直播】芯片设计工艺仿真全解析
西门子数字化工业软件资源中心
嵌入式设计资源库
智能楼宇/家电控制应用全解析
在线研讨会
EE直播间
小测验
白皮书
行业及技术活动
杂志免费订阅
免费在线工具
厂商资源中心
帖子
博文
返回顶部
×
 /4
/4 















文章评论(0条评论)
登录后参与讨论