
电机是随着施加于绕组的电压和所流过的电流的变化而旋转的。表示使电机旋转时的电信号变化的图称为“时序图”。在表示逻辑电路的工作等情况下也会用到“时序图”这个术语,在本文中是指电机驱动的时序图。
时序图是以转子位置(电角度)为横轴来表示各电路的主要信号的。在时序图中,当信号为数字信息时,通常用Hi或Lo两个值来表示。在下面的时序图中,霍尔信号和UH等的实际电压值各不相同,这些不同本应该体现在波形的高度上,但由于希望表达出来的是Hi或Lo,因此很多情况下并没有在波形中体现出来。
在这里,作为示例,给出了与前述有刷电机的工作几乎相同的无刷电机驱动电路的时序图。希望执行这样的工作时,最好将霍尔器件安装在下图所示位置。后面会讲到为什么这个位置更好,在这里只要知道最好安装在这里即可。接下来,我通过下图来进行具体介绍。
无刷电机驱动电路的时序图(1):绕组端子的电压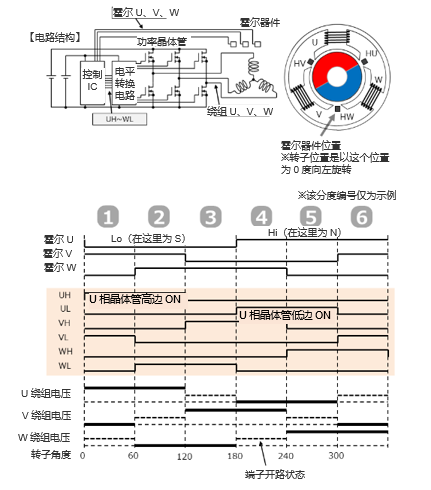
首先,设上图中的转子位置在时序图的左端,角度为0度(参见图底部的刻度值)。当电机从此处向左(逆时针方向)旋转时,每个电路信号的变化如时序图所示。下面对信号的进行简要说明:
■ 向控制IC输入:霍尔U、V、W
■从控制IC输出:UH~WL
■晶体管部分:U、V、W绕组电压
前面提到的“动作几乎与有刷电机相同”是指该绕组电压的模式相同。
前面的图中显示了绕组端子的电压。接下来,我将使用下图来讲解通过施加这种绕组端子电压,在什么位置产生电磁体,以及转子是如何旋转的。
第一张图是表示电流方向与N极/S极关系的示意图。要想很好地理解后续要介绍的时序图和1~6分度的转子位置解说,需要先了解第一张示意图中的关系。
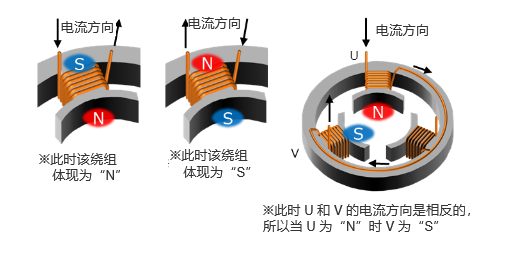

首先,在图中的分度1中,电源电压施加在U相绕组上,V相绕组接地(以下简称“GND”)。也就是可以理解为电流从U相流向V相。
另外,如果U相绕组为N极,则V相绕组为S极(假设是这样绕制的)。当转子处于1分度的位置时,如果绕组的磁极如上所示,则转子将逆时针旋转。
当转子转动,霍尔信号W的极性切换后,进入分度2。在这里,电流从U相流向W相,绕组的磁场如上图所示进行切换。此时转子也是逆时针旋转。
转子通过反复“产生磁场”→“转子旋转”→“霍尔信号切换”→“产生下一模式的磁场”→“转子旋转”→“霍尔信号切换”而连续旋转。这是该时序图所显示的工作情况。
对了,讲解内容读到这里,有些人可能会有疑惑:讲解的角度是否反了呢?的确,如果是讲解电路工作的话,按照上述思路是没问题的,但是从驱动电机的角度来看,应该是按照“希望在能让转子转动的位置产生磁场”→“以这种方式控制晶体管的ON/OFF” → “在必要的位置安装霍尔器件”的思路进行。在下一篇中,我将按照这个思路为大家介绍如何绘制时序图。
・时序图是电机驱动控制用的规格说明图,因此理解其中的波形含义是非常重要的。
・本文通过时序图显示了用来使电机旋转的施加电压模式,以及由此产生的电磁场。
首先应该掌握的是,相对于转子(永磁体),应该在什么位置产生电磁体的磁场更好。例如,如果希望逆时针旋转,那么就需要在永磁体N极左侧的适当位置创建电磁体的S极。然而,仅仅如此并不能说是最优的,除此之外还要求电机能够以尽可能少的功率(电能)产生所需的转矩(机械能)。这会受电机要素特性(如增加磁体的磁力)的影响,也受永磁体与电磁体的相对位置(角度)的影响。因此,重要的是要确切地知道创建电磁体的位置,而不仅仅是知道配置在左侧。
关于永磁体转子和电磁体定子产生的转矩,适用下图所示的理论。从下图可以看出,电机产生的转矩取决于磁体磁场与绕组(电磁体)磁场之间的相对角度θ,通过sinθ计算(假设绕组产生的磁场和永磁体产生的磁场的大小是恒定的)。
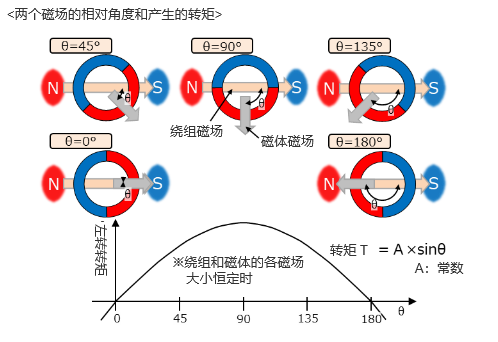
理论上,在磁场的相对角度为90度时转矩最大。因此,相对于转子磁场方向,最好使绕组磁场的方向在该角度附近。
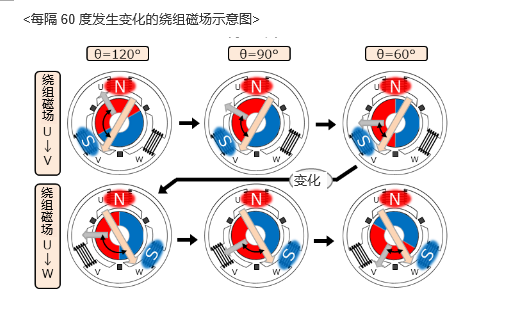
基于该理论,我们根据可能的条件来思考,在实机应用中应该以怎样的时序来产生绕组磁场才算好。首先,我们了解过可以利用3枚霍尔器件的极性信号,以60度间隔的电角度来区分转子位置。还有,通过施加在绕组端子上的电压组合,可以在6个方向上产生绕组磁场。由此可见,根据转子的6个位置(范围),正好可以选择6个方向的绕组磁场。
那么,在每个转子位置应产生多大相对角度的绕组磁场呢?如果要想获得较大的转矩,那么相对角度范围应在60~120度之间比较好。当转子旋转并超出该范围后,电机将会进入下一个绕组磁场模式(下图)。
我们基于这个思路,从下往上看下面给出的时序图。换句话说,我们需要根据转子的位置和转动情况来确认各信号处于什么样的状态(必须处于哪种状态)。
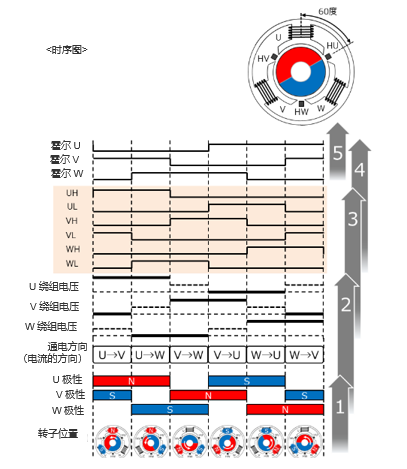
针对时序图最右侧灰色箭头所示的1~5,说明如下:
如上所述,无刷电机的时序图以及相应的霍尔器件安装位置就是这样决定的。这种工作模式与有刷电机一样的时序图,在无刷电机驱动控制中被称为“120度激励”。由于这种控制方式比较简单而得以广泛应用,不过目前已经针对无刷电机的驱动控制,设计出了其他多种激励模式。也可以说,这种方式与使用换向器的机械开关的结构不同,现在已经可以使用控制IC来调整激励模式了。其他的激励模式我会另行介绍。



 /1
/1 







文章评论(0条评论)
登录后参与讨论