
近年来,伴随着智慧化港口的大潮流,经纬恒润L4高级别智能驾驶业务产品也陆续扎根港口自动驾驶多个项目中,帮助港口实现无人水平运输自动化,达到降本增效的效果,助力客户实现智慧化绿色港口。在整个港口水平运输场景中,经纬恒润提供了端到端的车、路、网、云、图全栈式自研解决方案,包含了车端自动驾驶、路侧V2X车路协同、基于5G网络的远程遥控驾驶、后台云端调度、数字孪生、仿真系统、高精地图等专业模块,组成了一套完整的智慧港口解决方案。
V2X车路协同系统作为L4高级别智能驾驶业务自动驾驶系统的有力支撑,实现了对无人驾驶车辆运行区域内交通情况的实时感知以及V2X通信。一方面将感知对象的状态参数(包括绝对位置、速度、航向角、尺寸、类型等)实时上报到后台调度系统,另一方面基于C-V2X路侧通信单元(RSU),可以通过PC5通信接口与车载通信单元(OBU)直接通信,将感知到的目标结果发送到智能驾驶车辆,使车辆获得局部实时交通状况,以增强智能车辆的感知能力,从而减小交通事故发生概率。
▎系统介绍
V2X车路协同系统主要由5合1融合感知单元(FPU)、路侧通信单元(RSU)和车载通信单元(OBU)三部分组成。
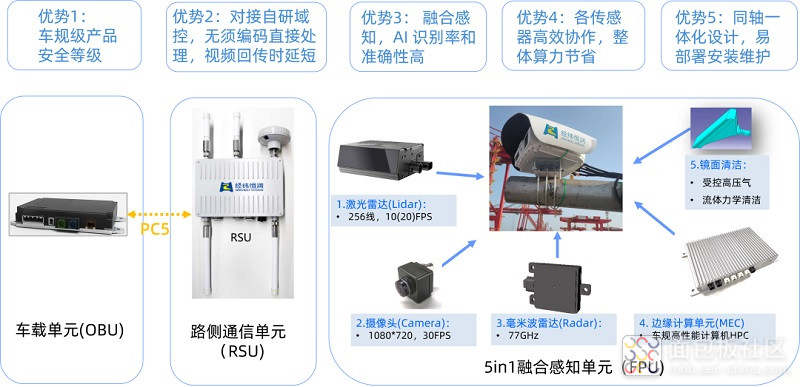
5合1融合感知单元(FPU)
针对传统的传感器分散部署方案需要定期相互校准以及传感器环境适应性、功能安全和使用寿命满足不了港口环境要求等问题,经纬恒润研发了5合1路侧融合感知单元(FPU),将车规级量产的激光雷达、毫米波雷达、摄像头以及HPC高性能计算单元布置于同一设备内,实现了各传感器的同视轴一体化安装,并可对光学器件表面进行高压气流自动清洁,大大减少了设备初次安装部署、定期清洁和标定的维护时间,保障了感知功能长期可靠运行,提升了港口运维效率。同时,5合1路侧融合感知单元(FPU)具备设备自检功能,当系统中的零部件(包括传感器、计算单元等)出现问题时,能够自动检测故障原因,并向后台进行故障上报。

路侧通信单元(RSU)
经纬恒润自主研发的车规级路侧通信单元(RSU)采用高增益天线,覆盖范围可达 300m,通过短距离直连通信PC5接口,实现与车辆之间交换快速变化的动态信息(如位置、速度、航向等),负责将FPU感知结果、交通安全、交通效率和自动驾驶相关信息分发至云端以及车端,实现人、车、路、云之间的全通信连接和高效信息交互,扩展自动驾驶车辆的感知范围,减小感知盲区,使其可以更加安全、高效地通过复杂路段。通信安全满足《基于LTE的车联网无线通信技术安全证书管理系统技术要求》,满足机密性、完整性、可认证性,同时可抵御重放攻击,可检测网络嗅探、DDoS攻击等行为。

车载通信单元(OBU)
车载通信单元(OBU)支持标准5G空口Uu接口及PC5接口通信方式与车端、路端及云端进行交互,通过获取到的道路信息、交通信息、事件信息、车辆信息等,实现V2X各种应用场景,为辅助驾驶和自动驾驶提供服务。当存在碰撞危险时,OBU能够通过接收路侧感知设备的预警信息,实现交叉路口碰撞预警以及弱势交通参与者碰撞预警等功能;能够接收路侧感知设备的感知数据,实现路侧感知设备和无人驾驶车辆的感知数据共享;同时能够通过车辆之间的信息实时交互和通信,完成交汇路口转向预警以及超车和碰撞预警等功能。

▎系统特点
车路协同路侧感知系统的主要功能和指标如下:
· 传感器链路延时小于20ms
· 实现对激光雷达、摄像头、毫米波雷达感知信息的融合
· 实现集卡、平板车辆、办公车辆、行人等目标的检测和识别
· 实现集卡、平板车辆、办公车辆、行人等目标的位置测量、速度测量及尺寸估计
· 多传感器采用同视角、一体化的结构设计,避免独立布置,方便现场安装、标定及后期校准工作
· 激光传感器具有自清洁功能,降低后期维护成本
· 具有防水、防尘、防盐雾能力
· 与边缘计算设备进行时间同步,同步误差小于5ms
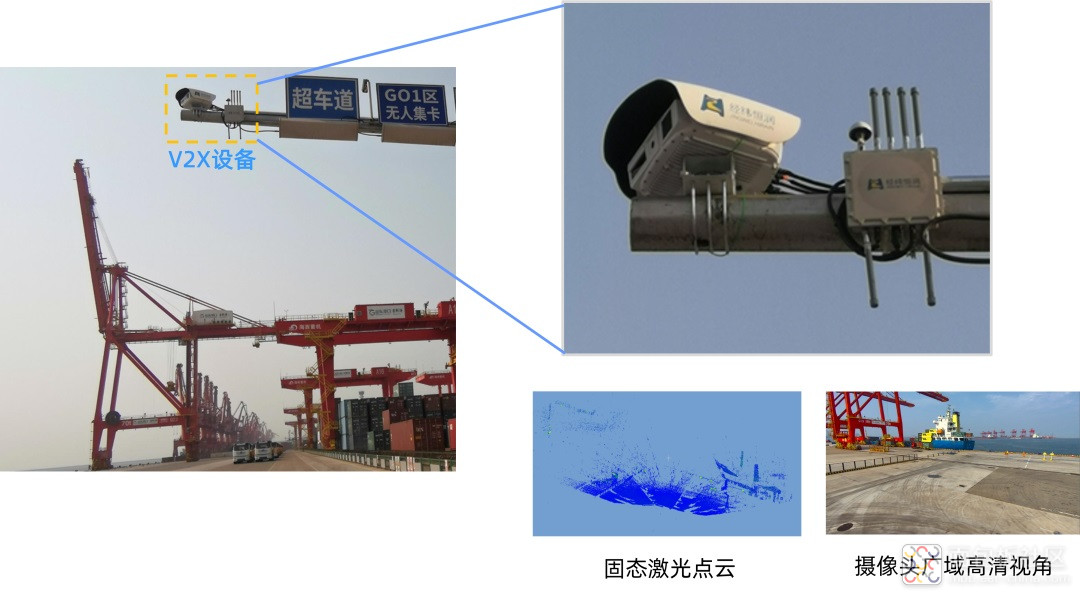
▎应用案例
目前,经纬恒润V2X车路协同系统已在日照港和龙拱港集装箱码头部署运营,为L4高级别智能驾驶业务自动驾驶系统提供了有力支撑。
在港口场景下,主要有两大应用场景:
· V2I场景(车辆和基础设施通信),依托经纬恒润V2X路侧感知系统和路侧通信单元、道闸控制系统等配套设施建设及内/外集卡路由通道新作业工艺,使得自动化堆场能够实现基于多传感器融合感知的路口交通情况实时监控,同时对道闸根据作业流实现了自动化智能控制开闭,实现了无人集卡与传统内集卡、外集卡作业车辆混流下安全通行并高效作业,避免了路口拥堵及交叉作业危险。
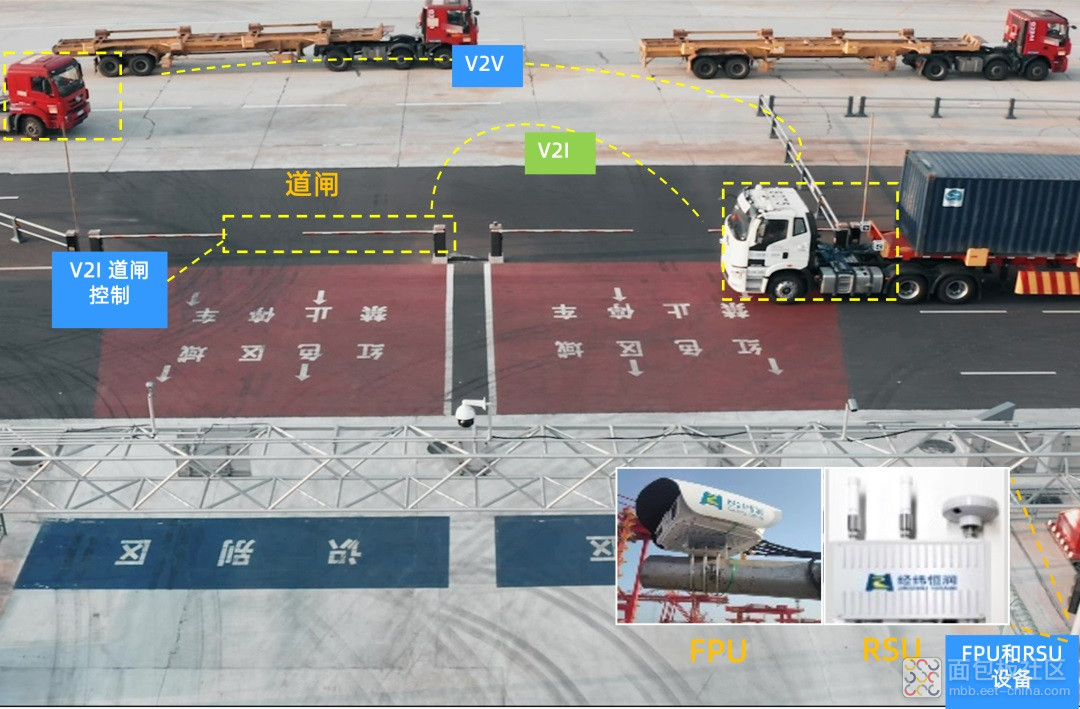
· V2V场景(车辆和车辆通信),通过车辆之间的信息实时交互和通信,完成交汇路口转向预警以及超车和碰撞预警等功能,提升单车自动驾驶的安全和港口作业效率。

V2X车路协同产品,在自动驾驶和未来无人驾驶场景中发挥了重要作用,同时也是未来智慧交通和智慧城市建设方面重要的基础设施。经纬恒润将继续坚持自主创新,为客户提供更高质量、更好体验、更具有市场竞争力的产品和服务,为实现客户场景数字化、自动化、智能化目标而努力!
作者: 经纬恒润, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3882431.html
版权声明:本文为博主原创,未经本人允许,禁止转载!


 /2
/2 





经纬恒润 2024-4-2 15:46