#!/usr/bin/env python3
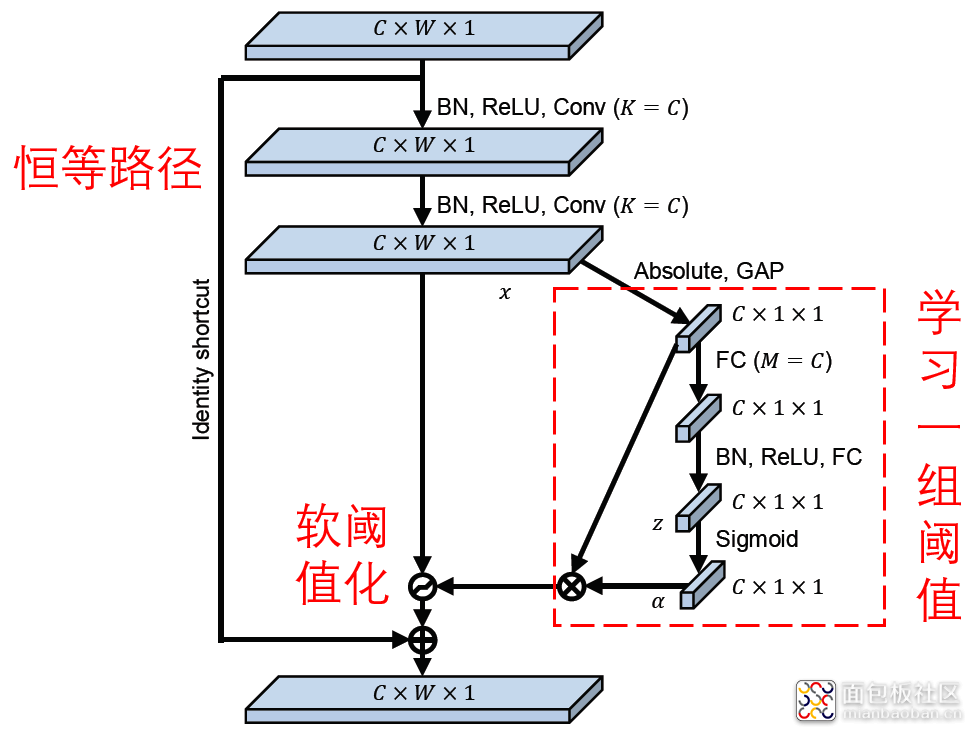
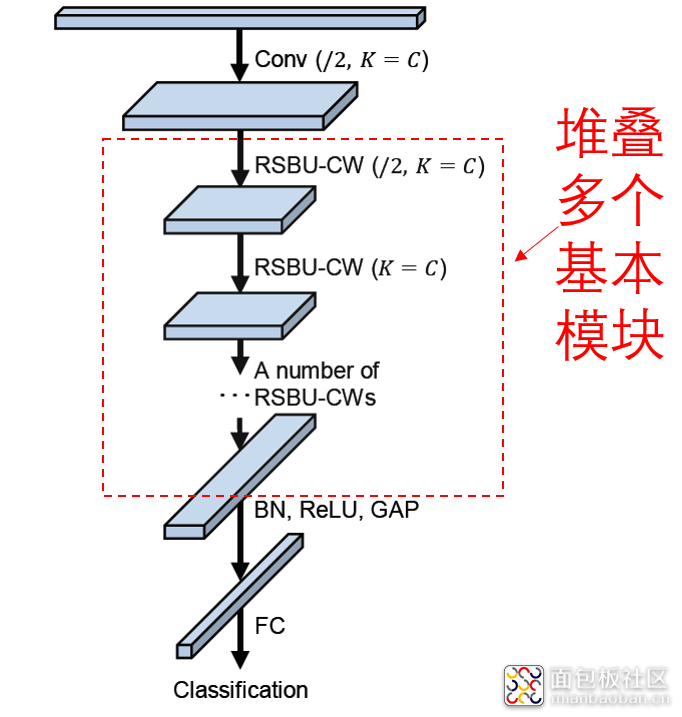
# -*- coding: utf-8 -*-"""Created on Sat Dec 28 23:24:05 2019Implemented using TensorFlow 1.0.1 and Keras 2.2.1 M. Zhao, S. Zhong, X. Fu, et al., Deep Residual Shrinkage Networks for Fault Diagnosis, IEEE Transactions on Industrial Informatics, 2019, DOI: 10.1109/TII.2019.2943898@author: me"""from __future__ import print_functionimport kerasimport numpy as npfrom keras.datasets import mnistfrom keras.layers import Dense, Conv2D, BatchNormalization, Activationfrom keras.layers import AveragePooling2D, Input, GlobalAveragePooling2Dfrom keras.optimizers import Adamfrom keras.regularizers import l2from keras import backend as Kfrom keras.models import Modelfrom keras.layers.core import LambdaK.set_learning_phase(1)# Input image dimensionsimg_rows, img_cols = 28, 28# The data, split between train and test sets(x_train, y_train), (x_test, y_test) = mnist.load_data()if K.image_data_format() == 'channels_first': x_train = x_train.reshape(x_train.shape[0], 1, img_rows, img_cols) x_test = x_test.reshape(x_test.shape[0], 1, img_rows, img_cols) input_shape = (1, img_rows, img_cols)else: x_train = x_train.reshape(x_train.shape[0], img_rows, img_cols, 1) x_test = x_test.reshape(x_test.shape[0], img_rows, img_cols, 1) input_shape = (img_rows, img_cols, 1)# Noised datax_train = x_train.astype('float32') / 255. + 0.5*np.random.random([x_train.shape[0], img_rows, img_cols, 1])x_test = x_test.astype('float32') / 255. + 0.5*np.random.random([x_test.shape[0], img_rows, img_cols, 1])print('x_train shape:', x_train.shape)print(x_train.shape[0], 'train samples')print(x_test.shape[0], 'test samples')# convert class vectors to binary class matricesy_train = keras.utils.to_categorical(y_train, 10)y_test = keras.utils.to_categorical(y_test, 10)def abs_backend(inputs): return K.abs(inputs)def expand_dim_backend(inputs): return K.expand_dims(K.expand_dims(inputs,1),1)def sign_backend(inputs): return K.sign(inputs)def pad_backend(inputs, in_channels, out_channels): pad_dim = (out_channels - in_channels)//2 return K.spatial_3d_padding(inputs, padding = ((0,0),(0,0),(pad_dim,pad_dim)))# Residual Shrinakge Blockdef residual_shrinkage_block(incoming, nb_blocks, out_channels, downsample=False, downsample_strides=2): residual = incoming in_channels = incoming.get_shape().as_list()[-1] for i in range(nb_blocks): identity = residual if not downsample: downsample_strides = 1 residual = BatchNormalization()(residual) residual = Activation('relu')(residual) residual = Conv2D(out_channels, 3, strides=(downsample_strides, downsample_strides), padding='same', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(residual) residual = BatchNormalization()(residual) residual = Activation('relu')(residual) residual = Conv2D(out_channels, 3, padding='same', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(residual) # Calculate global means residual_abs = Lambda(abs_backend)(residual) abs_mean = GlobalAveragePooling2D()(residual_abs) # Calculate scaling coefficients scales = Dense(out_channels, activation=None, kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(abs_mean) scales = BatchNormalization()(scales) scales = Activation('relu')(scales) scales = Dense(out_channels, activation='sigmoid', kernel_regularizer=l2(1e-4))(scales) scales = Lambda(expand_dim_backend)(scales) # Calculate thresholds thres = keras.layers.multiply([abs_mean, scales]) # Soft thresholding sub = keras.layers.subtract([residual_abs, thres]) zeros = keras.layers.subtract([sub, sub]) n_sub = keras.layers.maximum([sub, zeros]) residual = keras.layers.multiply([Lambda(sign_backend)(residual), n_sub]) # Downsampling (it is important to use the pooL-size of (1, 1)) if downsample_strides > 1: identity = AveragePooling2D(pool_size=(1,1), strides=(2,2))(identity) # Zero_padding to match channels (it is important to use zero padding rather than 1by1 convolution) if in_channels != out_channels: identity = Lambda(pad_backend)(identity, in_channels, out_channels) residual = keras.layers.add([residual, identity]) return residual# define and train a modelinputs = Input(shape=input_shape)net = Conv2D(8, 3, padding='same', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(inputs)net = residual_shrinkage_block(net, 1, 8, downsample=True)net = BatchNormalization()(net)net = Activation('relu')(net)net = GlobalAveragePooling2D()(net)outputs = Dense(10, activation='softmax', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(net)model = Model(inputs=inputs, outputs=outputs)model.compile(loss='categorical_crossentropy', optimizer=Adam(), metrics=['accuracy'])model.fit(x_train, y_train, batch_size=100, epochs=5, verbose=1, validation_data=(x_test, y_test))# get resultsK.set_learning_phase(0)DRSN_train_score = model.evaluate(x_train, y_train, batch_size=100, verbose=0)print('Train loss:', DRSN_train_score[0])print('Train accuracy:', DRSN_train_score[1])DRSN_test_score = model.evaluate(x_test, y_test, batch_size=100, verbose=0)print('Test loss:', DRSN_test_score[0])print('Test accuracy:', DRSN_test_score[1])复制代码#!/usr/bin/env python3
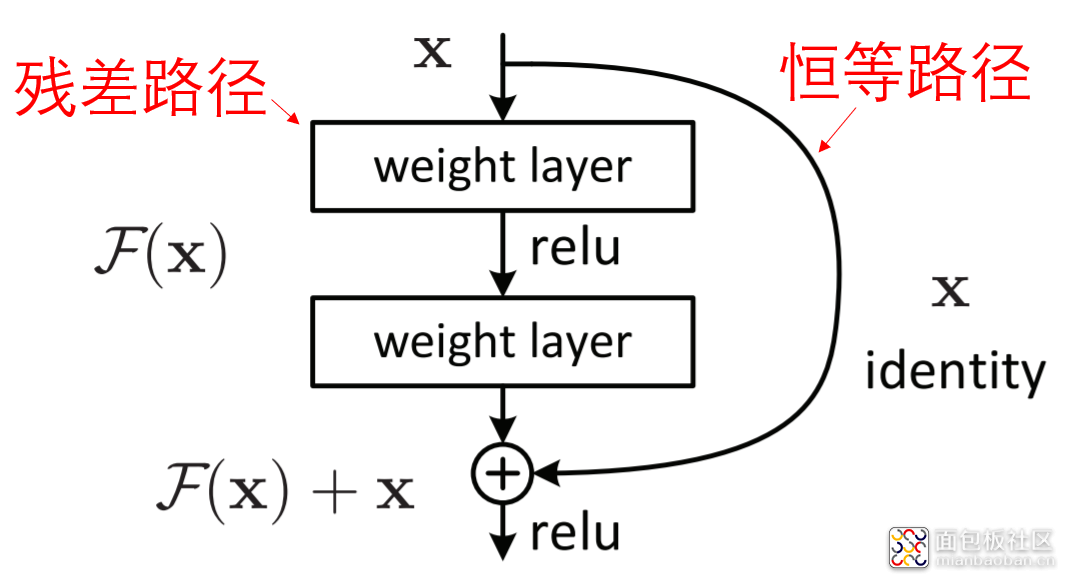
# -*- coding: utf-8 -*-"""Created on Sat Dec 28 23:19:03 2019Implemented using TensorFlow 1.0 and Keras 2.2.1K. He, X. Zhang, S. Ren, J. Sun, Deep Residual Learning for Image Recognition, CVPR, 2016.@author: me"""from __future__ import print_functionimport numpy as npimport kerasfrom keras.datasets import mnistfrom keras.layers import Dense, Conv2D, BatchNormalization, Activationfrom keras.layers import AveragePooling2D, Input, GlobalAveragePooling2Dfrom keras.optimizers import Adamfrom keras.regularizers import l2from keras import backend as Kfrom keras.models import Modelfrom keras.layers.core import LambdaK.set_learning_phase(1)# input image dimensionsimg_rows, img_cols = 28, 28# the data, split between train and test sets(x_train, y_train), (x_test, y_test) = mnist.load_data()if K.image_data_format() == 'channels_first': x_train = x_train.reshape(x_train.shape[0], 1, img_rows, img_cols) x_test = x_test.reshape(x_test.shape[0], 1, img_rows, img_cols) input_shape = (1, img_rows, img_cols)else: x_train = x_train.reshape(x_train.shape[0], img_rows, img_cols, 1) x_test = x_test.reshape(x_test.shape[0], img_rows, img_cols, 1) input_shape = (img_rows, img_cols, 1)# Noised datax_train = x_train.astype('float32') / 255. + 0.5*np.random.random([x_train.shape[0], img_rows, img_cols, 1])x_test = x_test.astype('float32') / 255. + 0.5*np.random.random([x_test.shape[0], img_rows, img_cols, 1])print('x_train shape:', x_train.shape)print(x_train.shape[0], 'train samples')print(x_test.shape[0], 'test samples')# convert class vectors to binary class matricesy_train = keras.utils.to_categorical(y_train, 10)y_test = keras.utils.to_categorical(y_test, 10)def pad_backend(inputs, in_channels, out_channels): pad_dim = (out_channels - in_channels)//2 return K.spatial_3d_padding(inputs, padding = ((0,0),(0,0),(pad_dim,pad_dim)))def residual_block(incoming, nb_blocks, out_channels, downsample=False, downsample_strides=2): residual = incoming in_channels = incoming.get_shape().as_list()[-1] for i in range(nb_blocks): identity = residual if not downsample: downsample_strides = 1 residual = BatchNormalization()(residual) residual = Activation('relu')(residual) residual = Conv2D(out_channels, 3, strides=(downsample_strides, downsample_strides), padding='same', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(residual) residual = BatchNormalization()(residual) residual = Activation('relu')(residual) residual = Conv2D(out_channels, 3, padding='same', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(residual) # Downsampling (it is important to use the pooL-size of (1, 1)) if downsample_strides > 1: identity = AveragePooling2D(pool_size=(1, 1), strides=(2, 2))(identity) # Zero_padding to match channels (it is important to use zero padding rather than 1by1 convolution) if in_channels != out_channels: identity = Lambda(pad_backend)(identity, in_channels, out_channels) residual = keras.layers.add([residual, identity]) return residual# define and train a modelinputs = Input(shape=input_shape)net = Conv2D(8, 3, padding='same', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(inputs)net = residual_block(net, 1, 8, downsample=True)net = BatchNormalization()(net)net = Activation('relu')(net)net = GlobalAveragePooling2D()(net)outputs = Dense(10, activation='softmax', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(net)model = Model(inputs=inputs, outputs=outputs)model.compile(loss='categorical_crossentropy', optimizer=Adam(), metrics=['accuracy'])model.fit(x_train, y_train, batch_size=100, epochs=5, verbose=1, validation_data=(x_test, y_test))# get resultsK.set_learning_phase(0)resnet_train_score = model.evaluate(x_train, y_train, batch_size=100, verbose=0)print('Train loss:', resnet_train_score[0])print('Train accuracy:', resnet_train_score[1])resnet_test_score = model.evaluate(x_test, y_test, batch_size=100, verbose=0)print('Test loss:', resnet_test_score[0])print('Test accuracy:', resnet_test_score[1])复制代码



 /1
/1 







用户3902290 2020-1-15 21:21
curton 2020-1-15 15:28