
1. 运动功能说明
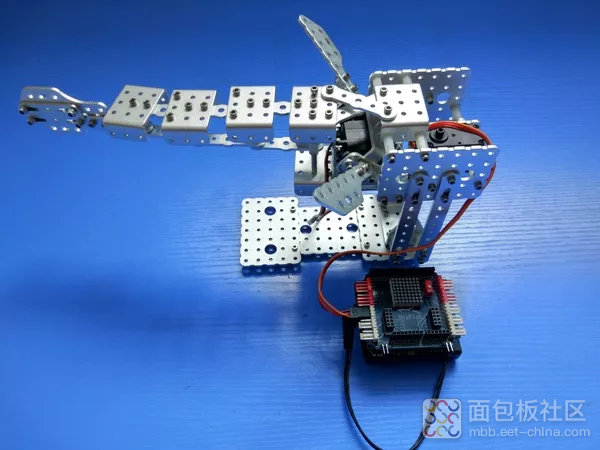
本文示例将实现R330样机机器鱼胸鳍能够灵活的上下摆动的功能。

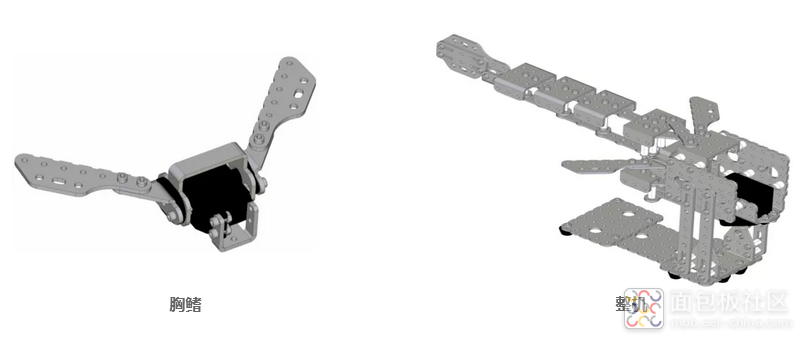
2. 结构说明
本样机采用舵机模块来进行仿生机器鱼结构的设计。
3. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:

电路连接:将舵机连接在Bigfish扩展板的D4端口。
作者: 机器谱, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-4052389.html
版权声明:本文为博主原创,未经本人允许,禁止转载!



 /5
/5 





文章评论(0条评论)
登录后参与讨论