
上午花了半天时间熟悉了stm32的PWM模块。中午利用午饭时间把PWM功能调试成功。当然,很简单的东西,也许很多前辈估计都不屑一顾的东西。
今天最大的感叹就是网络资源实在是个巨大的宝库,真的很庆幸,在这个复杂的社会环境里,在一个到处充斥着私心、私利的时代,各个网站,各个论坛上的众多网友都时刻保持着开源的氛围。学习一定要和他人交流,而网络提供了这么一个极好的平台。
废话少说,言归正传。
实现功能:采用定时器2的通道2,使PA1输出频率1K,占空比40的PWM波形,用PA8随意延时取反led灯,指示程序运行。
首先熟悉一下定时器的PWM相关部分。看图最明白
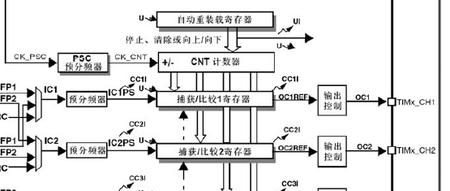
其实PWM就是定时器的一个比较功能而已。
CNT里的值不断++,一旦加到与CCRX寄存器值相等,那么就产生相应的动作。这点和AVR单片机很类似。既然这样,我们要产生需要的PWM信号,就需要设定PWM的频率和PWM的占空比。
首先说频率的确定。由于通用定时器的时钟来源是PCLK1,而我又喜欢用固件库的默认设置,那么定时器的时钟频率就这样来确定了,如下:
AHB(72MHz)→APB1分频器(默认2)→APB1时钟信号(36MHz)→倍频器(*2倍)→通用定时器时钟信号(72MHz)。
这里为什么是这样,在RCC模块学习记录里有详细记载,不多说。
因此图中的CK_PSC就是72MHz了。
下面的资料也是网上一搜一大把,我就罗列了:
STM32的PWM输出有两种模式,模式1(PWM1)和模式2(PWM2),由TIMx_CCMRx寄存器中的OCxM位确定的(“110”为模式1,“111”为模式2)。模式1和模式2的区别如下:
110:PWM模式1-在向上计数时,一旦TIMx_CNT=TIMx_CCR1时通道1为无效电平(OC1REF=0),否则为有效电平(OC1REF=1)。时通道1为有效电平,否则为无效电平;在向下计数时,一旦timx_cnt>
时通道1为有效电平,否则为无效电平;在向下计数时,一旦timx_cnt>
111:PWM模式2-在向上计数时,一旦TIMx_CNT=TIMx_CCR1时通道1为有效电平,否则为无效电平。时通道1为无效电平,否则为有效电平;在向下计数时,一旦timx_cnt>
时通道1为无效电平,否则为有效电平;在向下计数时,一旦timx_cnt>
由此看来,模式1和模式2正好互补,互为相反,所以在运用起来差别也并不太大。我用的是模式一,因此后面的设定都是按照模式一来设定的。
PWM的周期是就是由定时器的自动重装值和CNT计数频率决定的。而CNT的计数时钟是CK_PSC经分频器PSC得到,因此CNT的时钟就是CK_PSC/分频系数。这个分频系数在TIM_TimeBaseStructure.TIM_Prescaler确定。我设置的值是72,因此CNT的计数频率也就是CK_CNT的频率为1MHz。
下一步就是确定定时器自动重装值。因为CNT每自加到ARR寄存器的值时就会自动清零,当然前提是设定为为向上计数模式,而就是根据这个溢出事件来改变PWM的周期。所以PWM信号的频率由ARR的值来确定。我设置的值是1000-1,即TIM_TimeBaseStructure.TIM_Period = 1000-1;因此PWM的周期是1MHz/1000=1KHz。
接下来就要确定PWM的占空比了。因为CNT在自加到ARR值的过程中会不断和CRRX的值相比较,一旦二者相等就产生匹配事件,但要注意CNT不会理会这件事,它会继续++直到等于ARR。而CRRX的值我设定为400-1,那么占空比就随之确定为40%。
好了,下面就是库函数的配置了。
TIMER输出PWM实现步骤
1. 设置RCC时钟;
2. 设置GPIO;
3. 设置TIMx定时器的相关寄存器;
4. 设置TIMx定时器的PWM相关寄存器。
首先是main函数和全局变量申明,很简单,不作说明
/* Private variables ---------------------------------------------------------*/
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TimOCInitStructure;
int main(void)
{
/*!< At this stage the microcontroller clock setting is already configured,
this is done through SystemInit() function which is called from startup
file (startup_stm32f10x_xx.s) before to branch to application main.
To reconfigure the default setting of SystemInit() function, refer to
system_stm32f10x.c file
*/
/* Add your application code here
*/
rcc_cfg();
gpio_cfg();
tim2_cfg();
pwm_cfg();
// /* Infinite loop */
while (1)
{
/* Set PA8 and PD2 */
GPIO_WriteBit(GPIOA, GPIO_Pin_8, Bit_SET);
delay();
/* Reset PA8 and PD2 */
GPIO_WriteBit(GPIOA, GPIO_Pin_8, Bit_RESET);
delay();
}
}
下面是IO口的配置:
void gpio_cfg()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
此处要注意的是PWM输出口要配置为复用推挽输出,原因我也不知道,反正照搬就是了。
下面是TIM配置函数,注释很清楚了,不作说明:
void tim2_cfg()
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
TIM_DeInit(TIM2);
TIM_InternalClockConfig(TIM2);
//预分频系数为72,这样计数器时钟为72MHz/72 = 1MHz
TIM_TimeBaseStructure.TIM_Prescaler = 72;
//设置时钟分割
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
//设置计数器模式为向上计数模式
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
//设置计数溢出大小,每计1000个数就产生一个更新事件
TIM_TimeBaseStructure.TIM_Period = 1000-1;
//将配置应用到TIM2中
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure);
//禁止ARR预装载缓冲器
TIM_ARRPreloadConfig(TIM2, DISABLE);
TIM_Cmd(TIM2, ENABLE); //使能TIMx外设
}
接下来是关键的PWM的配置函数:
void pwm_cfg()
{
//设置缺省值
TIM_OCStructInit(&TimOCInitStructure);
//PWM模式1输出
TimOCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
//设置占空比,占空比=(CCRx/ARR)*100%或(TIM_Pulse/TIM_Period)*100%
TimOCInitStructure.TIM_Pulse = 400-1;
//TIM输出比较极性高
TimOCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
//使能输出状态
TimOCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
//TIM2的CH2输出
TIM_OC2Init(TIM2, &TimOCInitStructure);
//设置TIM2的PWM输出为使能
TIM_CtrlPWMOutputs(TIM2,ENABLE);
}
stm32固件库的输出比较单元结构体与定时器的时基单元是分开定义的,而PWM模式只是输出比较结构体成员TimOCInitStructure.TIM_OCMode的一个取值,当把此结构体填充完后,还要映射到某个定时器,用TIM_OCXInit函数实现,我用了一个X,说明不止一个这样的函数,事实上,stm32的通用定时器都有四个通道,每个通道对应一个初始化函数,这里真够纠结的!最后还要使能该定时器的PWM输出功能,TIM_CtrlPWMOutputs(TIM2,ENABLE)函数要注意,是outputs而不是output,说明TIM2不止一个通道嘛!够复杂,够繁琐的!
下面是输出比较单元的结构体原型:
typedef struct
{
uint16_t TIM_OCMode; /*!< Specifies the TIM mode.
This parameter can be a value of @ref TIM_Output_Compare_and_PWM_modes */
uint16_t TIM_OutputState; /*!< Specifies the TIM Output Compare state.
This parameter can be a value of @ref TIM_Output_Compare_state */
uint16_t TIM_OutputNState; /*!< Specifies the TIM complementary Output Compare state.
This parameter can be a value of @ref TIM_Output_Compare_N_state
@note This parameter is valid only for TIM1 and TIM8. */
uint16_t TIM_Pulse; /*!< Specifies the pulse value to be loaded into the Capture Compare Register.
This parameter can be a number between 0x0000 and 0xFFFF */
uint16_t TIM_OCPolarity; /*!< Specifies the output polarity.
This parameter can be a value of @ref TIM_Output_Compare_Polarity */
uint16_t TIM_OCNPolarity; /*!< Specifies the complementary output polarity.
This parameter can be a value of @ref TIM_Output_Compare_N_Polarity
@note This parameter is valid only for TIM1 and TIM8. */
uint16_t TIM_OCIdleState; /*!< Specifies the TIM Output Compare pin state during Idle state.
This parameter can be a value of @ref TIM_Output_Compare_Idle_State
@note This parameter is valid only for TIM1 and TIM8. */
uint16_t TIM_OCNIdleState; /*!< Specifies the TIM Output Compare pin state during Idle state.
This parameter can be a value of @ref TIM_Output_Compare_N_Idle_State
@note This parameter is valid only for TIM1 and TIM8. */
} TIM_OCInitTypeDef;
其中没有加色的成员是高级定时器才有的,通用定时器就不用管了。
这里还有个TimOCInitStructure.TIM_OCPolarity 成员需要注意,它有什么作用呢?在网上查的资料,如下图:
前面说到pwm有pwm1和pwm2两种模式,这两种模式只能控制到OCXREF为止,TIM_OCPolarity 能控制OC1是直接等于OCXREF,还是取反极性!OC1才是最终的PWM信号。
这里有个小插曲,我用示波器去测量PWM信号,发现信号居然是双极性的,然后改变TIM_OCPolarity ,再测,还是双极性,只是倒了个跟头。还真以为stm32单片机能输出两极性的PWM,后面把示波器改为直流档(之前用的是交流档),波形才从零电位一下纵向移上去。以后要注意!


 /4
/4 


用户377235 2014-9-19 23:35
难得的好文章,我一直没理解PWM,看了你的文章,我明白了很多。
用户377235 2013-3-26 10:41
用户819473 2013-1-20 17:42