
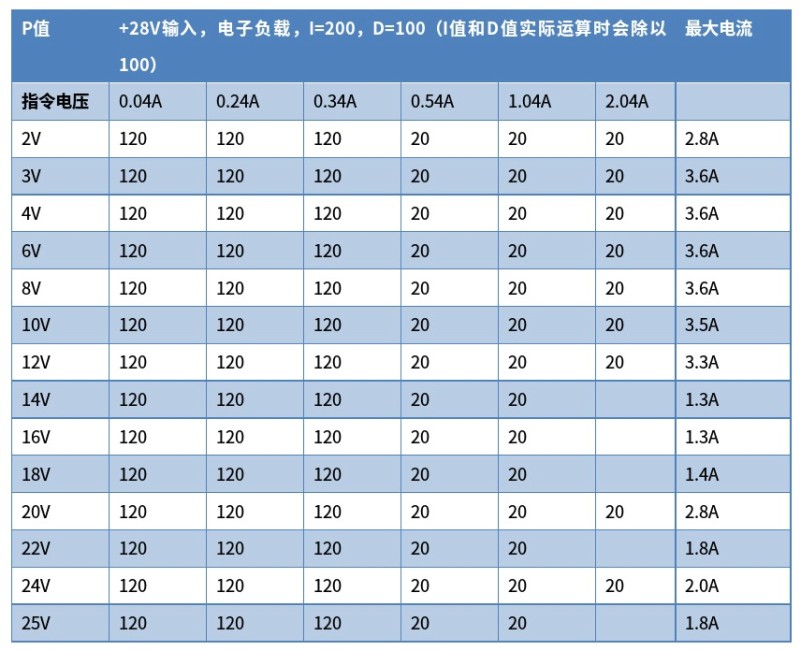

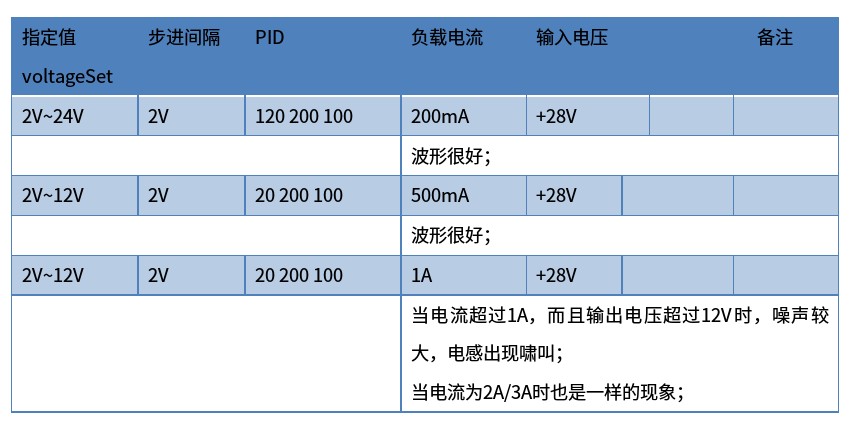
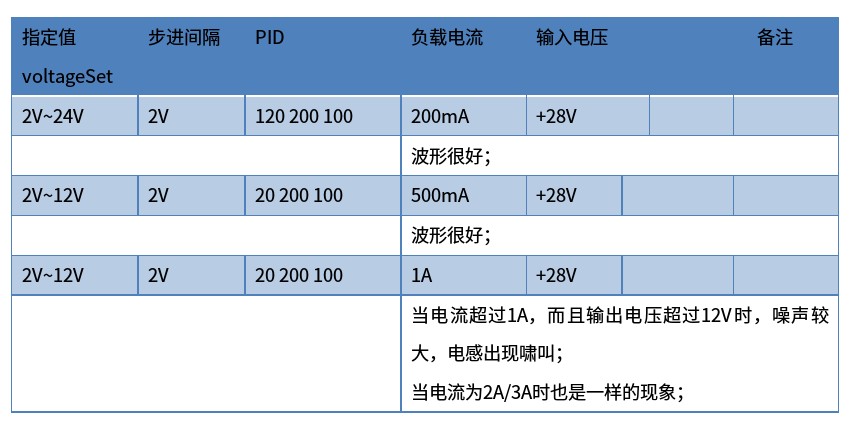
由第一张图能够看出来,当负载电流在200mA时,+2V~+24V都能获得不错的波形。虽然指令值切换瞬间,有超调的存在,但是不严重,可以接受。
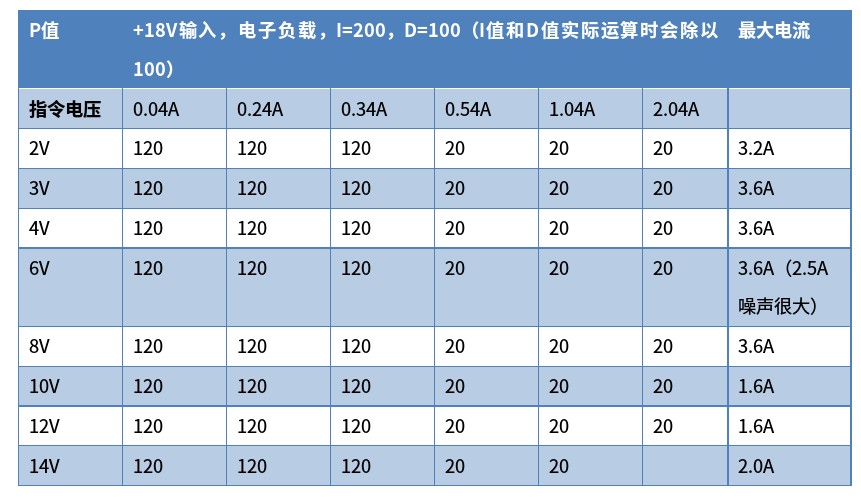
当负载在500mA时,虽然可以在+2V~+24V全量程调节,但是在+12V~+16V这一段上会出现噪声极大,电感啸叫的情况。在当负载超过1A时,+14V以上的电压就调不上去了。所以,能够在40mA~3A的负载电流下,进行数字调控,性能还能可接受的,就只有+3V~+10V这一段。
(好吧~理想很丰满,现实很骨感~~~~~当负载电流从小到大变化时,其中出现的一段噪声极大,电感啸叫的区间,应该和电感/电容/负载构成的电路谐振频率有关,因为更小与更大的负载电流下都能够获得良好的波形。至此,剩下的工作就只有MCU的其他功能实现了,比如RS485和RS232的编程,电位器手动控制,以及MCU温度反馈等等~)
总结,使用LM2677制作的这个恒压源,比起使用运放的方案,硬件成本更低,噪声稍大,调节速度稍逊,适用于不方便使用PWM调制的电阻性负载。


 /2
/2 






{kind=link}
用户593939 2016-6-5 18:32