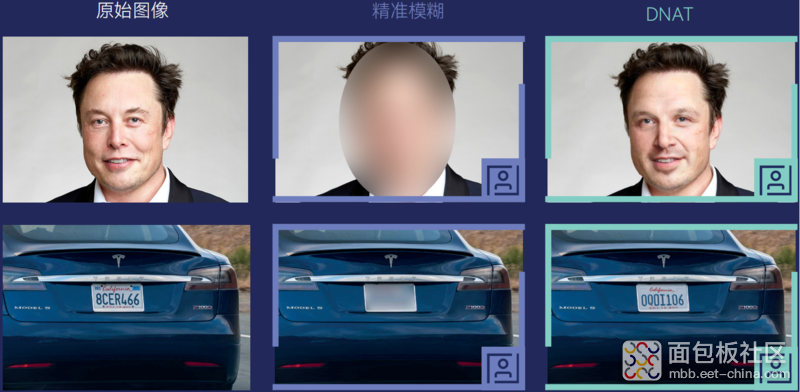
在科技迅速发展的时代, 保护个人隐私 的需求日益增长, 有效匿名化技术 的重要性不容忽视。无论是针对敏感的图像、视频,还是数据,在 隐私保护与保持视觉完整性 之间取得平衡至关重要。虽然模糊化一直是匿名化的常用选择,但一种更复杂、更强大的方法—— 深度自然匿名化(DNAT) ——已经成为一种更优的替代方案。 1、保留上下文信息 (1)模糊技术的局限: 模糊处理的主要缺点之一是 上下文信息的丢失 。当图像或视频严重模糊时,当图像或视频被严重模糊化时,重要的视觉线索和细节可能会 被扭曲 或 完全不可辨认 。 (2)DNAT的优势: DNAT利用先进的算法, 有选择性地修改 图像或视频中的特定元素,同时保留整体上下文。例如,通过 brighter AI的DNAT 技术在匿名化人脸时,公司可以 保留关键属性 ,如年龄、情感、视线方向、种族和年龄信息。这确保了匿名化内容仍然具有可理解性,并保持其 原始的视觉完整性 。 2、真实且美观的效果 (1)模糊技术的局限 :模糊化通常会导致 粗糙且不自然的外观 ,从而影响内容的理解和用户体验。 (2)DNAT的优势: DNAT借助深度学习技术,能够生成更加 真实且美观 的匿名化内容。通过分析原始数据并在大型数据集上进行训练,该算法学会模拟图像或视频中的自然变化,生成的匿名化结果能够 与周围环境无缝融合 。这种真实性的效果确保了匿名化内容 不会具有误导性 。 3、增强隐私保护 (1)模糊技术的局限: 尽管模糊化可以提供基本的隐私保护,但面对先进的图像还原技术可能并不足够。有经验的人员 可以使用去模糊算法或其他工具逆向处理,恢复敏感信息。 (2) DNAT的优势: DNAT显著提高了逆向匿名化的难度。通过以更复杂和细致的方式处理内容,深度学习模型提供了更高水平的隐私保护,确保 原始信息无法轻易恢复。 4、可扩展性和自动化 (1)模糊技术的局限: 模糊化处理可能是一个 耗时的过程 ,特别是在处理大型数据集时。为视频的每一帧或多张图像逐一应用和调整模糊效果所需的手动操作 既繁琐又不切实际。 (2)DNAT的优势: DNAT则可以实现这一过程的 自动化 。一旦模型完成训练,它便能够 高效地匿名化海量数据 ,使其在需要大规模匿名化的场景中更具 可扩展性和成本效益 。 5、适应性和可定制性 (1)模糊技术的局限性: 模糊化技术通常会对整个图像或视频应用统一程度的匿名化 ,而不考虑具体的隐私需求。 (2)DNAT的优势: DNAT则提供了更高的适应性和可定制性。模型可以根据不同的隐私需求进行微调,从而实现对图像或视频中特定区域或对象的 选择性匿名化。 这种灵活性使得匿名化过程能够得到精确控制,并确保隐私问题得到有效解决。 6、展望未来 (1)模糊技术的局限性: 模糊化会删除数据,在需求出现时仅能 提供极少可用数据。 (2)DNAT的优势: 由于能够保留语义分割,DNAT通常是公司选择的匿名化技术,这使其成为 适合驾驶分析和机器学习 的匿名化方法。因此,它已成为依赖分析和机器学习的企业选择 的匿名化解决方案 。我们坚信未来准备的重要性,并优先选择DNAT而非其他匿名化技术。

 标签: 智能汽车
标签: 智能汽车



