软件平台: MounRiver
Studio(MRS),硬件平台: CH32V103开发板、ULN2003步进电机驱动板、28BYJ-48步进电机,使用GPIO进行步进电机控制。
1.
ULN2003和28BYJ-48简介
ULN2003是高耐压、大电流复合晶体管阵列,由七个硅NPN
复合晶体管组成,每一对达林顿都串联一个2.7K 的基极电阻,在5V 的工作电压下它能与TTL
和CMOS 电路直接相连,可以直接处理原先需要标准逻辑缓冲器来处理的数据。
ULN2003是大电流驱动阵列,多用于单片机、智能仪表、PLC、数字量输出卡等控制电路中。可直接驱动继电器等负载。
输入5VTTL电平,输出可达500mA/50V。
ULN2003是高耐压、大电流达林顿系列,由七个硅NPN达林顿管组成。 该电路的特点如下:
ULN2003的每一对达林顿都串联一个2.7K的基极电阻,在5V的工作电压下它能与TTL和CMOS电路 直接相连,可以直接处理原先需要标准逻辑缓冲器来处理的数据。
关于步进电机,此处所用电机型号为28BYJ-48(步进电机),减速比为1:64,步进脚为5.625/64度,如果需要转动转动一圈,那么需要
360/5.625*64=4096 个脉冲信号。
步进电机是一种将电脉冲转化为角位移的执行设备。步进电机驱动信号为脉冲信号,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步进角)。
我们可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时我们可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的
2.
硬件连接
CH32V103开发板与ULN2003步进电机驱动板的连接方式如下:
PB6连接驱动板的IN1引脚
PB7连接驱动板的IN2引脚
PB8连接驱动板的IN3引脚
PB9连接驱动板的IN4引脚
3.
MRS中开发流程
1)首先新建一个CH32V103C8T6 的工程,这个要与对应芯片对应
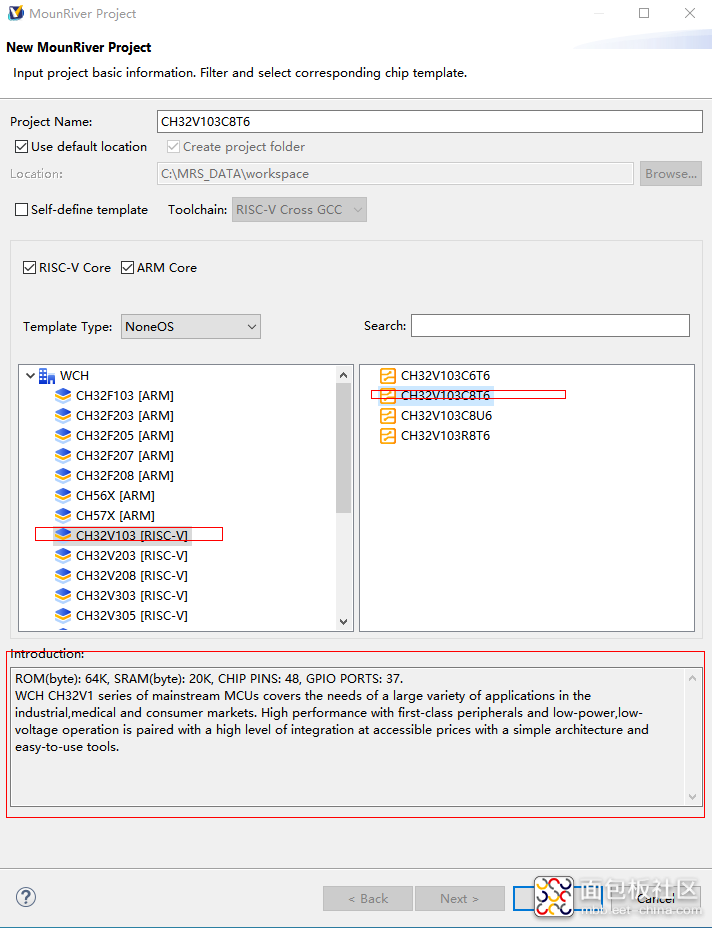
上图最下方红框中是对选中芯片的资源的简单介绍,方便查询
2) 新建完工程之后,我们打开main.c文件,可以看到主函数只是一些初始化和串口打印,我们自己的主函数逻辑可以添加在打印下面就可以了;
3) 新建一个hardware的文件夹,右键工程new->folder,填写文件名,点击finish即可,我们可以以同样的方式在hardware目录下再新建SD目录,SPI目录,条理清晰。
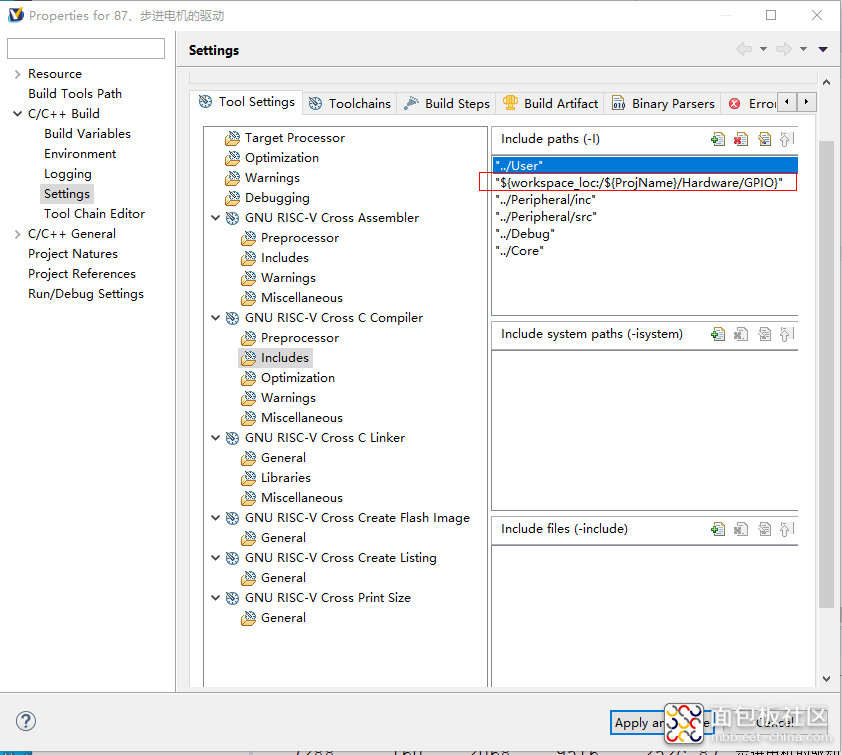
4) 在SPI目录下,New>Source File,填写文件名gpio.c,内容是电机初始化函数以及调速转向停止函数,在新建个gpio.h文件用来声明函数,这个新的头文件需要添加到头文件寻址路径中,点击菜单栏工程属性配置按钮,在弹出的页面中,如下图,点击绿色加号添加路径即可
驱动代码如下:
#include "gpio.h"
#include "debug.h" //#define N 4#define N 8 //步进电机正反转数组 数组的值,即对应GPIO引脚的值//单四拍//uint16_t phasecw[4] ={0x0200,0x0100,0x0080,0x0040};// D-C-B-A.(9-8-7-6)//uint16_t phaseccw[4]={0x0040,0x0080,0x0100,0x0200};// A-B-C-D.(6-7-8-9) ////双四拍//uint16_t phasecw[4] ={0x0300,0x0180,0x00C0,0x0240};// DC-CB-BA-AD.//uint16_t phaseccw[4]={0x00C0,0x0180,0x0300,0x0240};// AB-BC-CD-DA. //四相八拍uint16_t phasecw[8] ={0x0200,0x0300,0x0100,0x0180,0x0080,0x00C0,0x0040,0x0240};// D-DC-C-CB-B-BA-A-AB.uint16_t phaseccw[8]={0x0040,0x00C0,0X0080,0x0180,0x0100,0x0300,0x0200,0x0240};// A-AB-B-BC-C-CD-D-DA. //电机初始化函数void Moto_Init(void){ //步进电机初始化 // IN1: PB6 a // IN2: PB7 b // IN3: PB8 c // IN4: PB9 d GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9 ; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB,&GPIO_InitStructure); GPIO_ResetBits(GPIOB,GPIO_Pin_6 | GPIO_Pin_7 |GPIO_Pin_8 |GPIO_Pin_9 );} //电机正转函数//其中,speed的值越大,速度越慢,值越小,速度越快,speed相当于调节脉冲速度//转动速度和脉冲频率成正比,在此处,延时越小,频率越高void Motorcw(u8 speed){ uint8_t i=0; for(i=0;i<N;i++) { GPIO_Write(GPIOB,phasecw[i]); Delay_Ms(speed); }} //电机反转函数void Motorccw(u8 speed){ uint8_t i; for(i=0;i<N;i++) { GPIO_Write(GPIOB,phaseccw[i]); Delay_Ms(speed); }} //电机停止函数void MotorStop(void){ //GPIO_ResetBits(GPIOB,GPIO_Pin_6 | GPIO_Pin_7 |GPIO_Pin_8 |GPIO_Pin_9 ); GPIO_Write(GPIOB,0x0000);} //电机正转角度void Motorcw_angle(int angle,int speed){ int i,j; j=(int)(angle/0.70312); for(i=0;i<j;i++) { Motorcw(speed); }} //电机反转角度void Motorccw_angle(int angle,int speed){ int i,j; j=(int)(angle/0.70312); for(i=0;i<j;i++) { Motorccw(speed); }}复制代码
主函数可以调用我们驱动中的正反转函数来说实现想要的功能
int main(void)
{ USART_Printf_Init(115200); Moto_Init(); Delay_Init(); printf("This is Stepper motor driver\r\n"); Motorcw_angle(360,5); //步进电机正转角度函数 MotorStop(); Delay_Ms(1000); Motorccw_angle(360,5); //步进电机反转角度函数 MotorStop(); Delay_Ms(1000); }复制代码
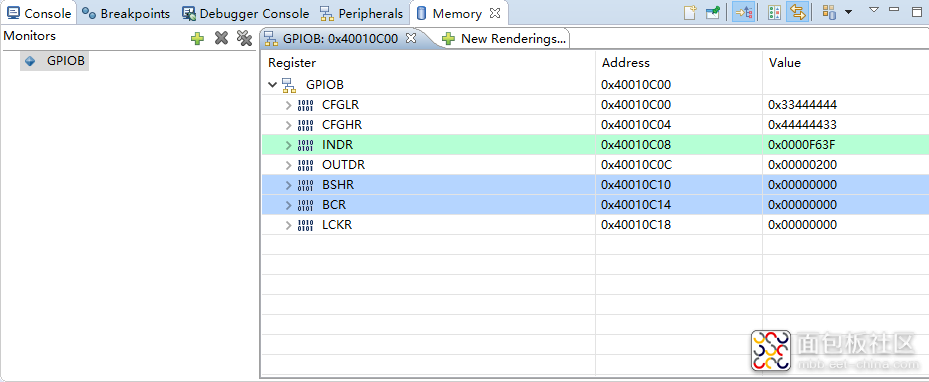
代码编辑完成,点击菜单栏编译按钮,在console窗口查看编译结果,无错误,就可以进入到调试去验证逻辑,点击菜单栏调试按钮,如果运行现象和理论不一致,可以通过左下角反汇编窗口,断点,外设寄存器,内核寄存器这几个窗口来配合查找逻辑BUG
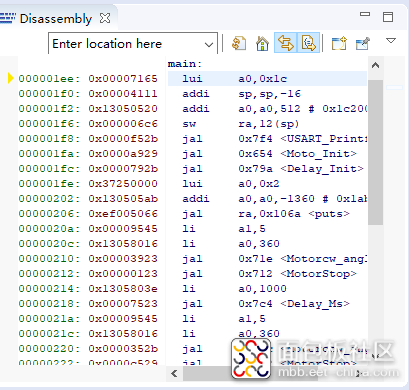
小提示,当程序运行到 HardFault_Handler 函数,可以观察Rregister窗口的mepc,mtval,mcause三个寄存器,分别代表,进入硬件错误中断前的pc,cpu取到的值,以及进入异常的原因。
4.
验证
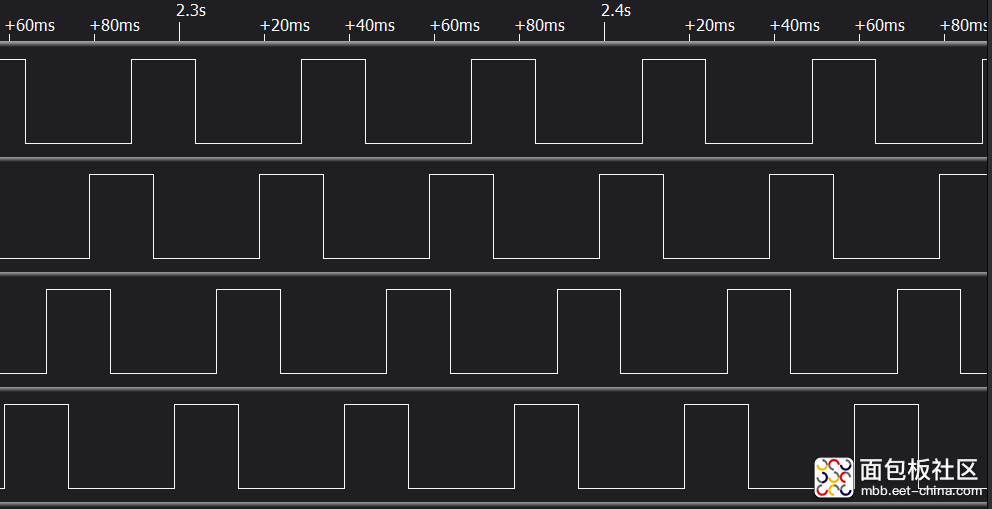
将编译好的程序下载到开发版并复位,通过逻辑分析仪对这几个GPIO引脚进行波形采集,具体如下图。将开发板、步进电机驱动板、步进电机连接起来,可看到电机进行正反转。






 /4
/4 






yzw92 2021-10-31 08:59
curton 2021-10-30 15:58