
显然,CAN错误处理有助于去除错误消息,并使CAN节点能够重新进行错误消息的传输。这确保了短暂的局部干扰(例如来自噪声)不会导致无效/丢失数据。相反,发送器将会尝试重新发送消息。如果它赢得仲裁(并且没有错误),则消息发送成功。
但是,如果错误是由于传输节点中的系统故障引起的怎么办?这可能会触发发送/去除相同消息的无限循环——干扰CAN总线。这就是CAN节点状态和错误计数器发挥作用的地方。
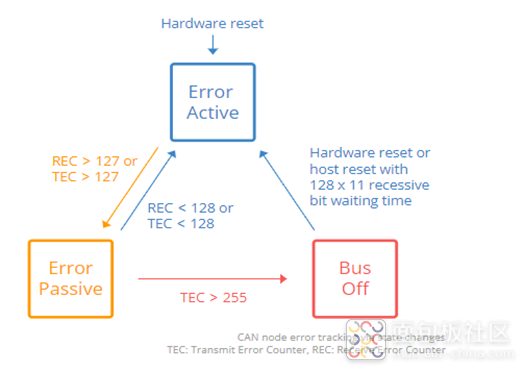
CAN错误跟踪的目的是通过降低有问题的CAN节点的权限来限制错误。具体来说,让我们看看三种可能的状态:
如果REC或TEC超过127,则CAN节点进入ErrorPassive状态
如果TEC超过255,则CAN节点进入总线关闭状态
每个CAN控制器都会跟踪自己的状态并采取相应的行动。CAN节点根据其错误计数器的值转换状态。具体来说,每个CAN节点都会跟踪发送错误计数器(TEC)和接收错误计数器(REC): 如果REC或TEC超过127,则CAN节点进入ErrorPassive状态 如果TEC超过255,则CAN节点进入总线关闭状态 那么错误计数器如何变化呢?在我们了解如何增加/减少错误计数器的逻辑之前,让我们重新审视CAN错误帧以及主要/次要错误标志。 从CAN错误帧图示中可以明显看出,在CAN错误帧的6个显性位序列之后观察到显性位的CAN节点将知道它引发了主要错误标志。在这种情况下,我们可以将此CAN节点称为错误的“发现者”。 起初,让一个CAN节点反复发现错误并通过在其他节点之前发出错误标志来迅速做出反应,这听起来可能是积极的。然而,在实践中,发现者通常也是导致错误的罪魁祸首。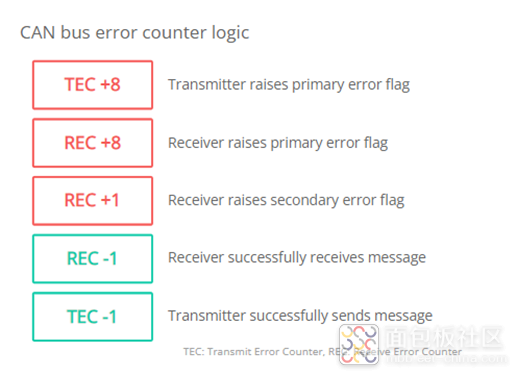
虹科CAN/LIN数据与错误记录器
CANedge1让您可以轻松地将数据从2xCAN/LIN总线记录到8-32GBSD卡中,并支持记录CAN/LIN错误。只需将其连接到汽车或卡车即可开始记录-并通过免费软件/API解码数据。此外,CANedge2添加了WiFi,让您可以将数据自动传输到您自己的服务器-并通过无线方式更新设备。 除此之外,虹科还为客户提供CAN卡、数据采集模块、CAN网关和转换器等硬件设备,和PCAN-Explore 6等软件。若想了解更多关于CAN技术服务和CAN产品,请联系虹科。
作者: 虹科工业智能互联, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3988237.html
版权声明:本文为博主原创,未经本人允许,禁止转载!




 /4
/4 






文章评论(0条评论)
登录后参与讨论