
在上期文章中,我们提到了自动驾驶的HIL测试中目前需要考虑的两个问题:
对于同步,需要考虑:
对于时延:

应对同步的问题可以使用网络时间服务器作为HIL模拟器和GNSS模拟器的共用时钟源,确保HIL仿真器和GNSS模拟器上的操作系统在数百微秒内紧密同步。在HIL模拟器和GNSS模拟器中均使用Linux系统,并配置精确时间协议(PTP)将时钟与网络时间服务器同步。
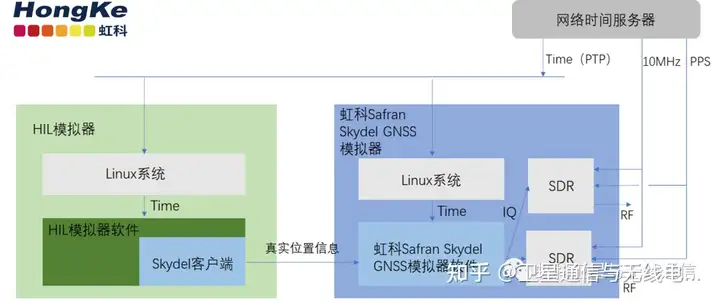
HIL模拟器接收到自动驾驶仪发送过来的数据后,会为数据添加时间戳,保证数据与GNSS模拟器共用同一个时钟源,以最大限度减少二者之间的抖动和漂移。接着通过HIL客户端把真实的位置信息发送到GNSS模拟器上,通过GPU生成IQ数据并发给SDR产生射频信号。需要注意,SDR也属于模拟器部分,同样需要进行同步,所以需要从同一时钟源接收PPS来进行时间同步。这样就实现了HIL模拟器和GNSS模拟器的安全同步。
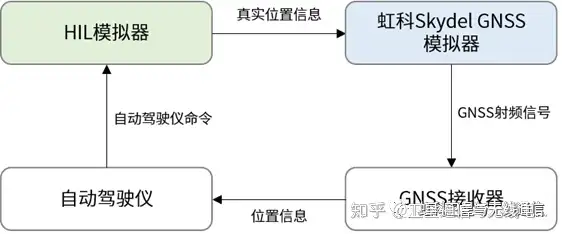
延迟问题解决方案在自动驾驶中,从自动驾驶仪命令输入真实信息给HIL模拟器,再到GNSS模拟器生成RF信号的过程中不可避免的会存在延迟。在这一个过程中,延迟存在于三个环节中:
作者: 德思特测试测量, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3989649.html
版权声明:本文为博主原创,未经本人允许,禁止转载!


 /2
/2 





文章评论(0条评论)
登录后参与讨论