
一、中车:超重载牵引式公铁两用AGV动力及控制系统

应用介绍:
主要用于机车头的牵引,每台AGV要求牵引1-3台机车头,牵引负载最高可达600T,对运动控制和位置反馈的问题要求精准,而且负载过大造成技术问题很多,现有机车牵引均为柴油机驱动方式,由于环保和精度要求,主管机构要求转为电驱动,国内没有成熟方案可供参考。为超重型200-600吨负载,用于机车头维保牵引+打磨牵引,有废弃和噪声环保要求,为公铁两用。
二、大众:一种汽车总装厂用AGV双举升装置

采用双舵轮对角结构设计,总载重量8T.全向举升式是双舵轮AGV,并且有举升电机,通过并行双剪升降台与AGV配套使用。通过双舵轮,全向AGV可以进行横移。
|
项 目 |
技术参数 |
||
|
车体尺寸(mm) |
4500*2000*800(未举升状态) |
||
|
额定载荷 |
8000Kg |
||
|
牵引销提升方式 |
电机 |
||
|
提升高度 |
800cm |
||
|
驱动方式 |
双舵轮驱动带转向 |
||
|
电机驱动器品牌 |
亿控 |
||
|
行走速度 |
空载速度 |
0~1.0m/s |
|
|
|
荷载速度 |
0~0.5m/s |
|
|
定位精度 |
±10mm ±1° |
||
|
地面平整度 |
±1° |
||
|
最小转弯半径 |
1500mm(以最终设计为准) |
||
|
导引方式 |
激光导航 |
||
|
激光头品牌 |
SICK |
||
|
电池参数 |
电池类型 |
锂电池 |
|
|
|
电池容量 |
48V 200AH |
|
|
充电方式 |
1.自动充电 2、在线充电:放电=1:4(锂电池) |
||
|
工作噪声 |
小于70dB (无警示声时) |
||
|
防碰撞安全装置 |
1.AGV车前端设有非接触式防碰传感器及接触式安全装置。 |
||
|
急停开关 |
在车体前方增加急停开关 |
||
三、飞机也要4S:飞机用千斤顶自动行走控制装置
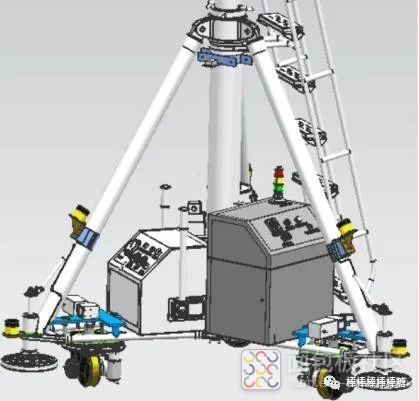
自动行走千斤顶车体解析为等边三角三驱动轮运动模型,需要车体机械和舵轮安装精度保障来避免三个舵轮之间相互拉扯导致的过电流报警。千斤顶的运动方式灵活,可以前进,后退,转弯,斜行,原地旋转。
本项目采用每台使用3台MRT10.0077驱动轮及配套驱动器,并在舵轮安装板上创新设计步进电机驱动升降机构进行千斤顶水平调节。
为顶部配备了非接触式的激光防撞雷达,障碍物在激光雷达探测外围区域,千斤顶低速运行,在内部区域,千斤顶停止运行并报警。在三舵轮上水平安装激光雷达进行水平面的二维平面防护;在三斜杆上倾斜安装激光雷达,起到了3D立体防护的作用。
四、机器人兄弟:搬运机器人+协作机器人

应用介绍:
机器人安装于AGV上,实现移动式加工,以节约生产操作设备投资成本,要求AGV位置精准、运行平稳,位置偏差少于1mm每条生产线,生产线设计长度一般为30到50米。
工厂差异化需求复杂,要求功率高、位置精准、进行多线反馈,并且空间要求有限,特种AGV的应用场地也均存在很大的差异,很难建立单一的标准系统实现其控制方案。
为智能物流和智能工厂的特种自动化输送设备等提供系统集成的解决方案。产品在运行效率、控制稳定性、节能环保等方面都具有很大的优势。
行业特点:机械手+AGV集成,替换传统布局型自动生产线,达到成本节约。
五、火爆全球的停车机器人

应用介绍:
实现背负举升重型AGV搬运产品的卸货需求。
例如自动停车库,在需要自动搬运轿车的同时,有自动转载和放下轿车的需求,要求AGV有自由运动和自动举升/自动回位功能。
可以进一步应用拓展。
行业特点:可集成立体车库、增加40%车位、提升客户体验。
六、那些高大上的飞机牵引

应用介绍:
分拖拉超重型AGV和嵌入式拖拉超重型AGV两类。
用于飞机生产部件装配和飞机的维修或其他操作牵引,位置精确度要求特别高,同时对AGV的移动速度有很高的要求。
飞机牵引超重型AGV搬运或牵引货物要求最高达150T,对运动控制和机械电气结构要求非常高,技术难度大,需要同时从产品和系统等方面进行综合研发。
技术要求:超重型30-100吨负载
高稳定性
搬运+牵引AGV可选
行业特点:发展迅速、用量巨大、技术要求高、难于替换
作者: 飞鱼慕鸟, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-4003055.html
版权声明:本文为博主原创,未经本人允许,禁止转载!





 /4
/4 






文章评论(0条评论)
登录后参与讨论