10轴 IMU 模块做出来后,一直还没用很好的演示实例。于是最近编了一个三维姿态演示程序。通过这个程序可以清楚的看到模块的姿态,非常直观。由于时间比较短,还有很多不完善的地方,欢迎大家提出建议。
程序介绍:这是一个观察物体三维姿态的演示程序。可以通过串口输入物体的三轴姿态角,然后就可以看到窗口中的立方体转动。
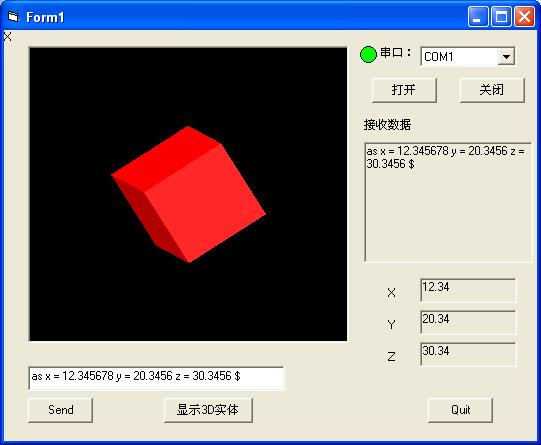
串口选择范围COM1-COM8,波特率固定为115200。使用时先打开串口,然后点击显示3D实体。串口输入的数据格式为x = 45.000 y = 45.000 z = 45.000 加回车换行符(45.000指角度值,可以取任意值,小数位至少3位,整数位最多3位)。
这是程序的界面,每次使用前需要选定使用的串口并打开,然后点击显示3D实体,就可以看到一个立方体。
如果这时串口接收到正确格式的数据,这个立方体就会旋转到相应的姿态。有一点需要注意,OpenGL的坐标是这样的:屏幕就是x-y轴确定的平面,z轴和屏幕垂直指向屏幕里面,如果和大家常用的直角坐标系不同,请根据此调整。
如果程序启动报错找不到glut.dll,请将此zip包中的同名文件拷贝到c:\windows\system目录下即可。



 /5
/5 


用户444208 2013-6-25 13:30
用户412121 2012-4-18 16:54
用户615508 2012-2-20 15:32