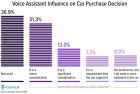
智能语音助理的发展结合了 AI 的语音识别及影像识别、无线技术、语言数据库的建立等不同功能,在车联网的应用上,语音助理的执行准确度与行车安全有着高度关联。百佳泰车用语音助理测试验证可透过 AI 智慧平台营造各种变因项目:如接受距离、接收角度、噪声干扰、声音特质、环境与气候, AI 平台自动记录数据找出不同情境的变因,全面找出行车过程使用语音助理所面临的潜在风险。 70% 以上的成年人会将车用语音助理的因素 视为购车决策的依据 根据美国指标性网站 Voicebot.ai 于 2020 年 1 月的报告指出 有 7 成 3 以上的成年人希望购买的新车需要有车用语音助理的功能 而且车主的购买意愿会随着车用科技的变革而随之提升 ( 像是车用语音助理的强化 ) 根据百佳泰过往与汽车业主合作的案例,车用语音助理前五大的场景应用,分别为「接听拨打电话」 、「语音查询车用导航与控制」、「收发信息」、「音乐播放」以及「收听广播」,显示车用语音助理在驾驶过程中,已成为俨如副驾驶重要的功能性角色。 车用语音助理运作流程 车用语音助理流程主要可分为三大步骤,分别是唤醒词、信号处理与判读,最后是对话管理 唤醒词 在车主发出语音指令之前,还需要一个唤醒词的程序 大部分车厂是先从方向盘按钮的方式来做唤醒,少部分车厂则是也支持语音唤醒词 信号处理与判读 1. 信号处理:信号处理过可供识别的声音,并排除环境存在的各种音源 2. 语音识别:系统识别出有意义的词汇 3. 语言理解运算:系统判读并进行语言的理解运算 对话管理 对话管理主要会有两条处理流程 一条线是语音反馈的处理,另一条线则是相对应的功能执行以及屏幕显示 例如与查询天气时,通常车机屏幕上也会有相对应的天气信息显示 又或者语音控制开启车窗时,除了语音反馈告知车主之外,也会有实际车窗开启的动作发生 驾驶的过程反复操作指令 恐会造成严重的交通事故 百佳泰结合了过往测试与实例经验,整合出车用语音助理在使用上,最常发生的指令问题分别是 1. 语音识别无法正确识别语音 2. 无法唤醒、误唤醒 3. 错误解释命令、响应内容错误 4. 功能性问题 5. 声音质量太差 6. 响应太慢延迟卡顿 我们可从以上 6 点问题,可整合出三大原因分别是 听不清楚 一般来说在车内空间的语音控制已构成一个声学场景,同时会有很多声音信号充斥 除了车主发出的语音控制指令之外,还混和其他人声或是音乐广播的人声 甚至混响 ( 也就是声音信号在车内的反射 ) 与躁声干扰 ( 例如车子引擎声、轮胎声,都会成为干扰的躁声 ) 而车主发出语音指令时,声音的来源以及拾音的距离角度也会成为听不清楚的原因之一 听不懂 语音助理本身听不懂词汇主要是因为车机会有预先指定的指令集 但如果车主讲了指定句式以外的语音指令 那就需要依靠车机本身的 AI 运算来进行大量的运算与判读 举一个简单例子 ( 连续对话语意理解 ) · 题目:今天出门需要带伞吗 ? · 明天呢 ? · 明天天气怎么样 ? 做不好 车机语音处理的区块,不只是语音的回馈而已 往往还需要与其他部分作连动,同时也有跨场景的使用问题 例如在车上控制家里的智能家电,因此这部分会有很多的功能性或是兼容性问题发生 只要是在汽车行驶的过程中,若语音助理无法实时做出反应上的回馈,车主恐需要分心花更多的心神去排除障碍,无论是对于品牌的商誉或是驾驶的安全均造成极大的威胁! 车用语音助理 AI 测试方案 车用语音助理的 AI 测试方案要求在于: 复杂场景的条件模拟: · 考虑不同的噪声条件,录制实际车辆的噪声:搭配语音指令,可测量在各环境下系统可正确语音识别的信号强度是多少。 · 语音数据库的打造: 12,000 种以上的语音命令包含不同条件 : 性别 / 年龄 / 语言 / 指令 / 方言,甚至可进行语音数据的客制化 百佳泰透过 AI 自动化连续测试与监控结果,来确保质量的一致性,导入 AI 元素如下 · 透过 AI 来识别车机的语音回馈是否正确,并可大量学疑累积语言,提升侦错率 · 透过 AI 来识别车机屏幕的影像显示是否正确,判断标准一致性,准确度高

 标签: 智能车
标签: 智能车





