
一、Python系列CMOS简介
安森美Python系列传感器主要面向工业级的应用,均为全局快门,-40°C~+85°C宽温级,可设置曝光拐点,采用像素内双采样校正技术具有较高的动态范围和一系列噪声水平抑制措施。具有片上自动曝光控制单元,数字输出,10bit ADC转换和720Mbps多通道源同步LVDS数据输出(部分型号支持DPI输出)。提供单色、彩色和红外增强(部分系列无红外增强型号,红外增强的目的是为了提升夜视性能)三个版本系列的器件。
(1)Python 0.48M
a)808×608有效像素,1/3.6靶面,相元尺寸4.8×4.8μm;
b)单通道LVDS输出,可编程兴趣区域读出,最高帧率120fps;
c)6.13×4.93mm小型封装,功耗最大265mW;
该类小封装、小靶面、低功耗器件,特别适合工业机器人、条码扫描、运动监测(双目视觉)、人脸识别等领域应用。
(2)Python 1300系列
该系列包括1.3M(1280×1024)、0.5M(800×600)和0.3M(640×480)像素三组型号。在640×480分辨率时,帧率最高可达815Hz,内置HDR曝光拐点设计(据说安森美不再保证该项性能),支持DPI并行输出和1~4通道LVDS输出。该型号的一个亮点是宽动态和高帧率,特别是高帧率特性,在模式识别如焊缝、轮毂、水电表等,高速运动扫描、高速运动机器手和ADAS等领域有着较好的表现。

(3)Python 5000系列
该系列包括5M(2592×2048)、2M(1920×1200)两组型号,在1920×1080分辨率时帧率最高可达255Hz,1、2、4、8通道LVDS输出,具有片上CDS特性。该系列为全局快门在较高分别率时仍然有较高帧率和较高的动态范围,且提供近红外增强型器件,比较适合道路监控抓拍、行业无人机、安防、机器视觉应用的领域。
(4)Python 25K/16K/12K
该系列提供25K(5120×5120 ASP-H)、16K(4096×4096 ASP-H)、12K(4096×3072 3/4)三个型号,具有近红外增强版本,具有片上CDS特性,32/16/8/4通道LVDS输出,在5120×5120像素输出时帧率可达80Hz。 该型号属于比较高端的,在高性能行业无人机、视觉SLAM、金属裂缝检测、摘选机器人、SMT贴片机等领域应用广泛。
二、方案概述
(1)硬件方案
Python系列CMOS一般选用FPGA硬件方案(至少CMOS接口必须是),一般的,会有以下搭配:
搭配方案一:单FPGA方案,这个工业检测和机器人领域用得比较多,一般选用Xilinx和Altera的主流FPGA型号实现,算法在FPGA实现,输出图像或检测结果到主控计算机或直接作用执行机构。
搭配方案二:FPGA + DSP,这个方案在机器视觉、高速运动扫描、金属裂缝检测等领域用得较多,前端是FPGA做接口或部分算法,FPGA一般用Xilinx、Altera或Lattice的主流型号实现,一般逻辑规模不需要太大,40K以下足矣。DSP承担主要的算法工作,DSP一般会选用TI的C6000系列以保证足够的浮点定点计算性能。
搭配方案三:FPGA + MCU,这个方案在双目视觉、监控等领域用得比较多,FPGA可以是Lattice的低成本专用套片,应用在MCU上做,MCU可以是海思、高通或全智的主流型号。
(2)软件方案
软件上根据不同的应用会有不同的实现方案,这里无法统一描述。但是,一般需要在FPGA前端至少做Sensor的非均匀性校正,针对固定漂移(offset)的FPN校正和系数漂移(gain)的PRNU校正。
博主以在FPGA上实现基本的Sensor解串接收和校正处理为例,平台为Xilinx ZYNQ-7000,看一看资源的占用情况:
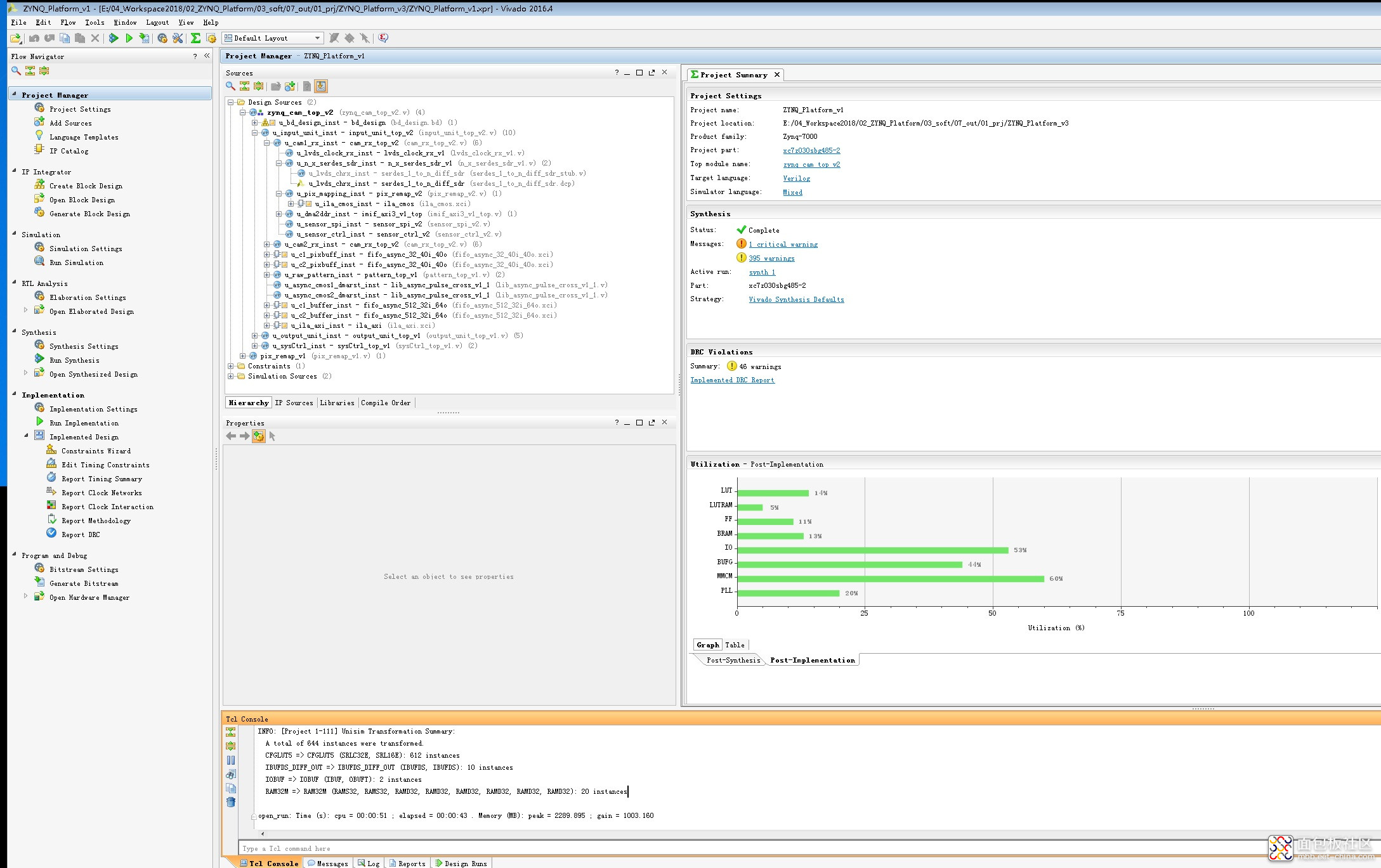
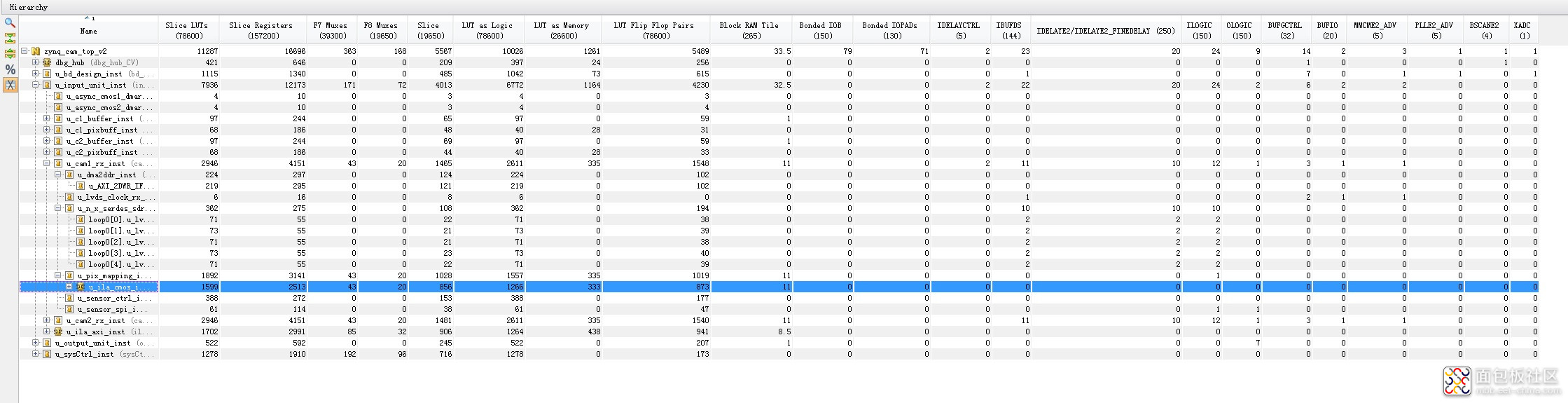
从图中可以看出,包括CMOS的LVDS时钟接收、数据接收、校正处理、DMA图像到DDR,SPI配置和CMOS的时序和状态控制等模块,占用的LUT资源约为1.4K(除去ila debug部分),优化之后的资源占用很精简。

作者: panda君, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3403128.html
版权声明:本文为博主原创,未经本人允许,禁止转载!



 /1
/1 







curton 2019-6-4 22:07