
毫米波雷达,就是指利用波长1-10mm、频率30GHz-300GHz的毫米波,通过测量回波的时间差算出距离。毫米波雷达最开始是用于军事领域,而随着技术的不断提升,现在也开始逐渐应用于汽车领域。
工作原理毫米波雷达(也就是ADAS智能系统)主要分为三个模块:环境感知,计算分析,控制执行。首先由天线向外发射毫米波,发射出去的毫米波遇到障碍物时会被反射回来,接收天线开始接收目标反射回来的信号;经后方处理后,将回波内包含的速度、距离等信息转换为可读取信息,从而获取汽车车身周围的物理环境信息。
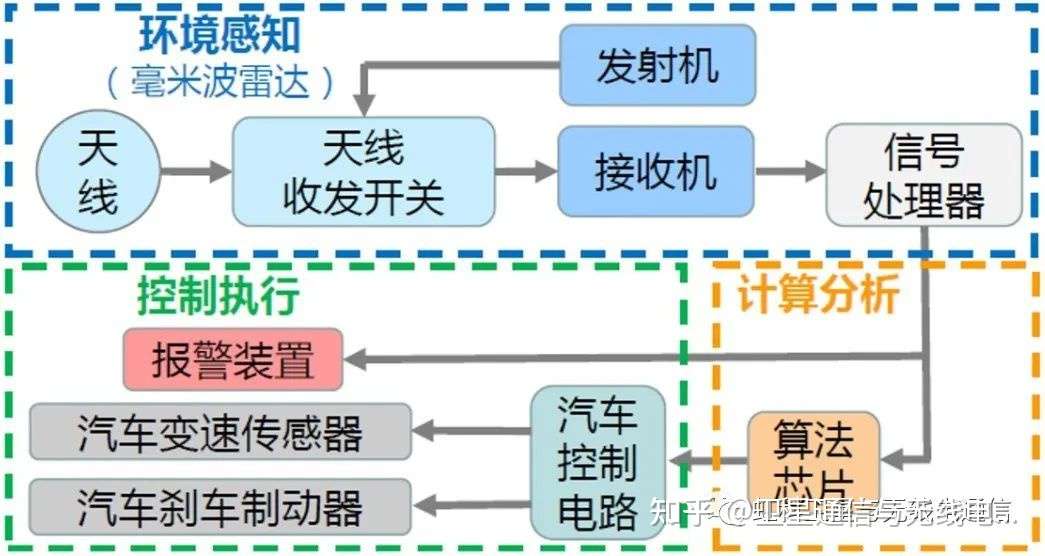
根据所探知的物体信息进行目标追踪和识别分类,结合车身动态信息进行数据融合,经由中央处理单元(ECU)进行智能处理、合理决策后,告知驾驶员或及时对汽车做出主动干预。
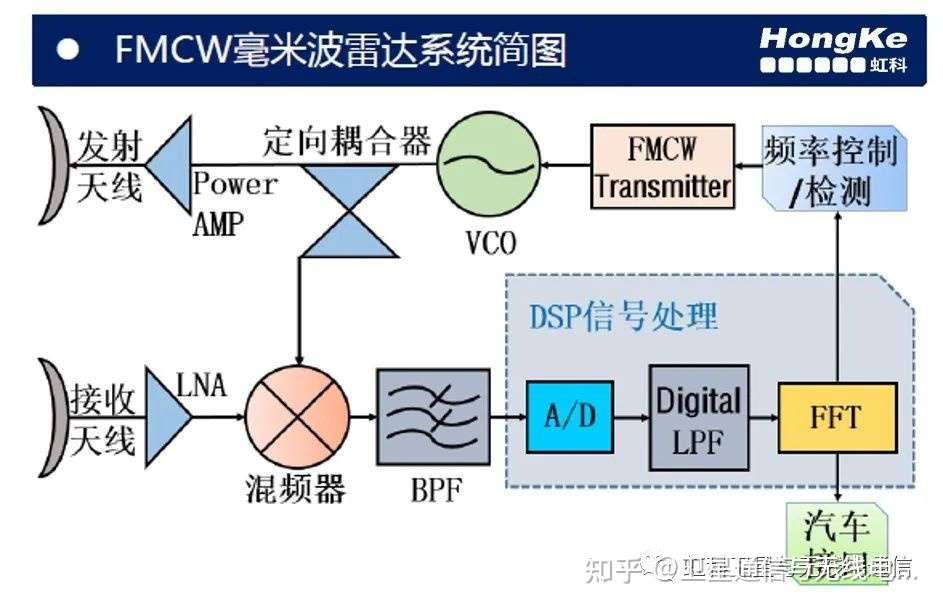
一般而言,发送的信号类型有两种,一种是脉冲信号(即非连续信号),另外一种就是连续信号。而在车载毫米波雷达中,因为其既需要能探测多个目标,还要能够从回波信号中读取到速度与距离等信息,因此工作机制为线性调频连续波机制(LFMCW mode)。除此之外,由于毫米波需要探测多个目标,因此其需要使用三角波,而不是锯齿波,图中是结合车载毫米波工作框图给出FMCW波的整个系统简图:
目前来看,未来各探测传感器融合是必然的趋势,这能够取长补短,并大大地节约成本,从芯片角度讲,基于多芯片级联的79GHz MiMo是产业发展方向。然而,毫米波雷达目前也是存在其自身缺陷的,相对于激光雷达而言,其成像的精细度上来看是不如激光雷达的,因此在小物体识别上是存在安全隐患的,而激光雷达目前依旧是ADAS系统中要用到的,从未来来看,视觉+相控阵(成像)毫米波雷达感知融合将成为一个重要的发展方向。
虹科手持式频谱分析仪能够帮助进行76GHz车辆无线电设备射频测试,可以应用于汽车毫米波雷达测试。在之前的文章中介绍了这款频谱仪,今天我们重点介绍如何通过虹科手持式频谱分析仪来进行汽车毫米波雷达测试。
频率范围
占用带宽
带外发射
发射机杂散
接收机杂散
作者: 德思特测试测量, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3989649.html
版权声明:本文为博主原创,未经本人允许,禁止转载!




 /4
/4 






文章评论(0条评论)
登录后参与讨论