
MAX31855芯片采集K型热电偶温度
本篇试用报告主要介绍如何通过Nanopi M2已经实现的SPI0驱动程序,实现用户模式下的SPI通讯,完成对K型热电偶温度数据的采集。
1.MAX31855介绍
MAX31855具有冷端补偿,将K、J、N、T或E型热电偶信号转换成数字量。器件输出14位带符号数据,通过SPITM兼容接口、以只读格式输出。转换器的温度分辨率为0.25℃,最高温度读数为+1800℃,最低温度读数为-270℃,对于K型热电偶,温度范围为-200℃至+700℃,保持±2℃精度。
硅天下科技常备型号: MAX31855KASA+T SOP8 2500片/包
2.MAX31855引脚、通讯模式及温度算法
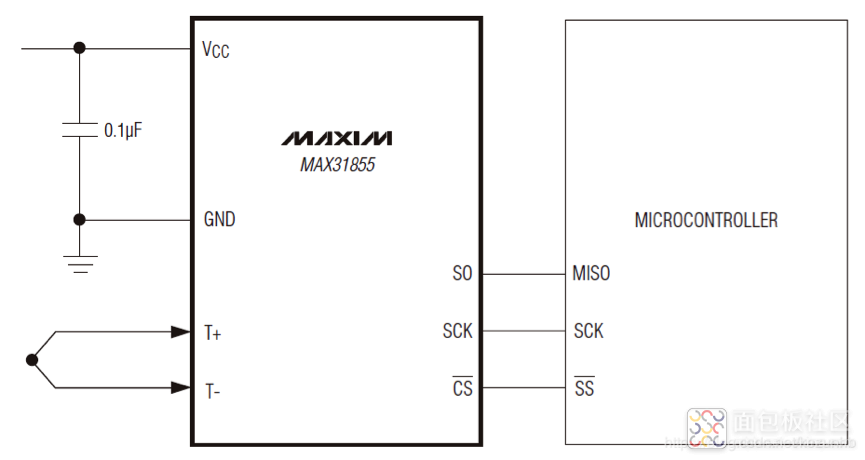
2.1MAX31855与MCU或MPU接线图:
2.2SPI通讯时序图:
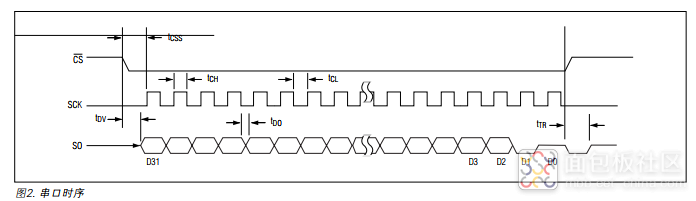
驱动CS为低电平时,SO引脚将输出第一位数据。通过串口读取完整的冷端补偿热电偶温度,需要14个时钟周期。读取热电偶和参考端温度需要32个时钟周期(表2和表3)。在时钟下降沿读取输出位。第一位D31为热电偶温度符号位。D[30:18]位包含温度转换数据,顺序为MSB至LSB。D16位正常状态下为低电平,热电偶输入开路或对GND或VCC短路时变为高电平。参考端温度数据从D15开始。输出转换数据时, CS任何时候均可变为高电平。
根据以上描述,将上述时序、数据位的含义转换为后续的程序代码。
3. 硬件环境搭建
根据第一节对MAX31855引脚的功能描述,将K型热电偶、MAX31855、Nanopi M2用杜邦线连起来。
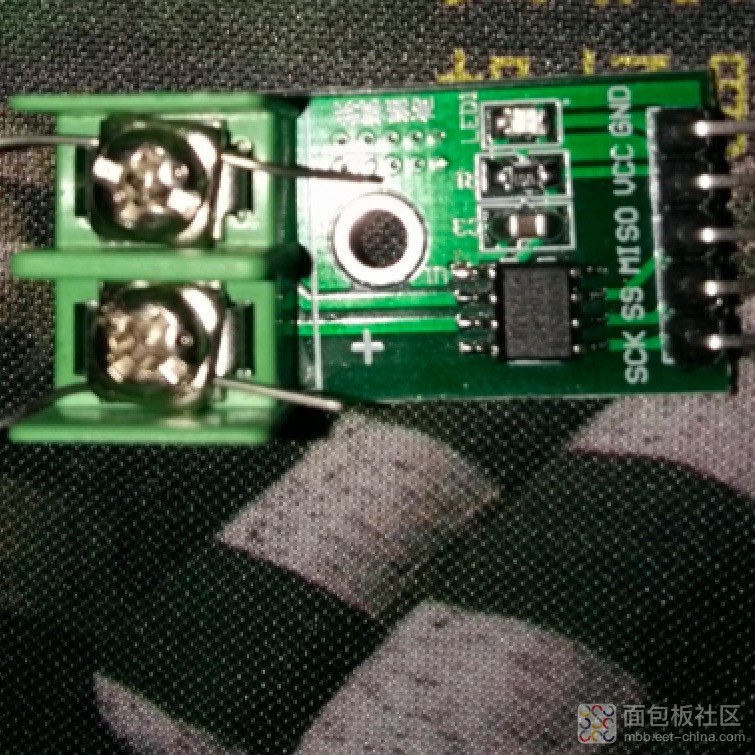
MAX31855实物图:
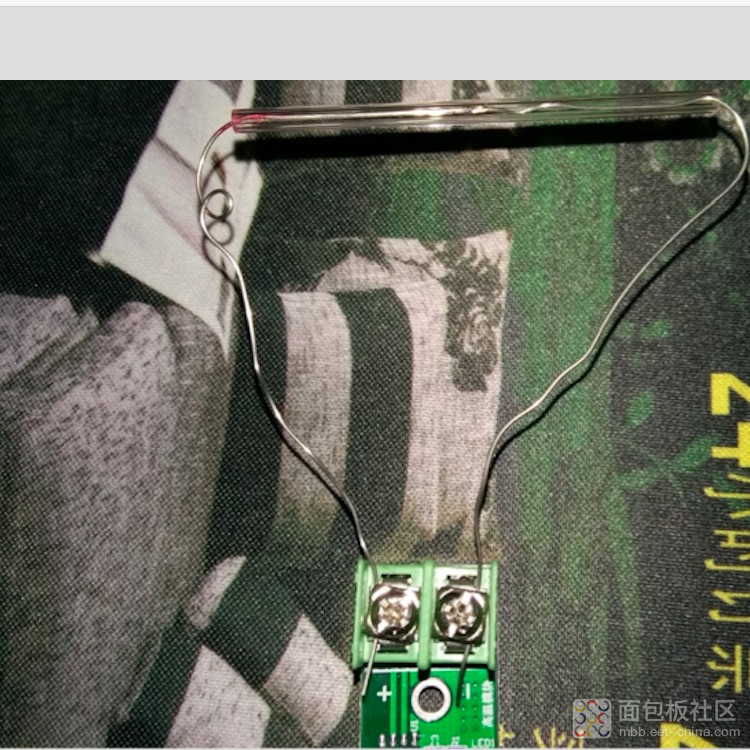
MAX31855连接K型热电偶:
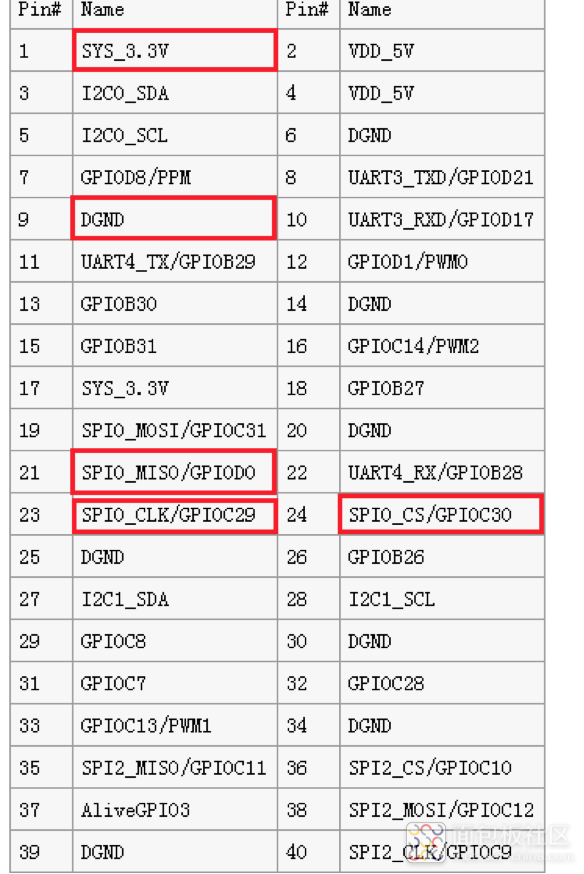
Nanopi M2的SPI0接口如下(3.3V,GND,MISO,CLK,CS共5根线):
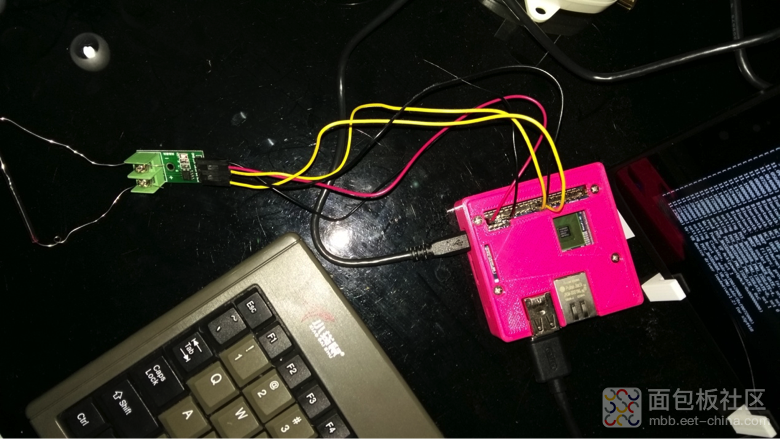
K型热电偶、MAX31855和Nanopi M2硬件连接:
4. 基于QT的K型热电偶SPI接口数据采集软件开发
4.1 创建QT项目
在命令行输入如下命令:
su root
password:fa
qtcreator
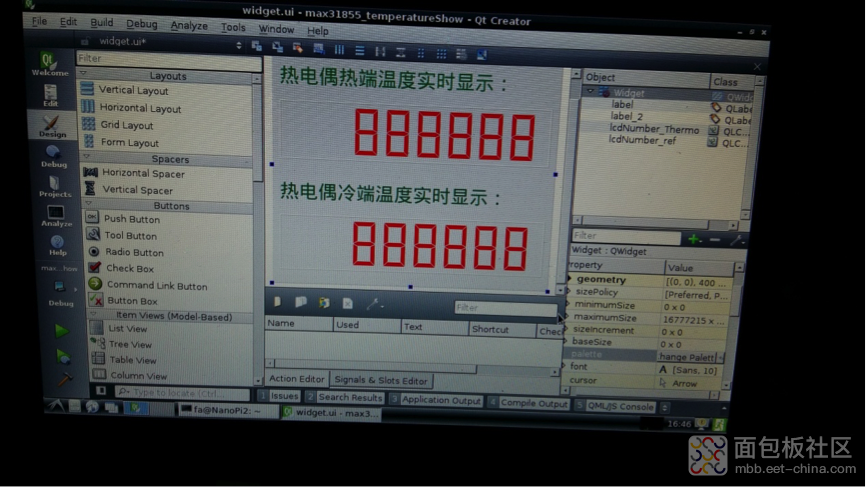
启动QT软件开发环境,新建项目,项目名称我选为max31855_temperatureShow,软件类型设置widget,设计界面如图所示:
4.2 编写头文件
1)common.h
#ifndef _COMMON_H_
#define _COMMON_H_
#define __DEBUG
#ifdef __DEBUG
#define DEBUG(format, args...) \
printf("FAHW-Lib: " format, ## args)
#else
#define DEBUG(format, args...)
#endif
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
extern void clearLastError();
extern void setLastError(const char *fmt, ...);
#define EXPORT
extern int writeValueToFile(char* fileName, char* buff);
extern int writeIntValueToFile(char* fileName, int value);
extern int readValueFromFile(char* fileName, char* buff, int len);
extern int readIntValueFromFile(char* fileName);
#endif
2)libfahw-filectl.h
#ifndef __FRIENDLYARM_HARDWARE_FILECTRL_H__
#define __FRIENDLYARM_HARDWARE_FILECTRL_H__
int openHW(const char *devName, int flags);
int writeHW(int fd, const void *_data, size_t len);
int readHW(int fd, void *_data, size_t len);
int selectHW(int fd, int sec, int usec);
void closeHW(int fd);
int ioctlWithIntValue(int fd, int cmd, int value);
#endif
3)libfahw-spi.h
#ifndef __FRIENDLYARM_HARDWARE_SPI_H__
#define __FRIENDLYARM_HARDWARE_SPI_H__
// SPIBitOrder
#define LSBFIRST (0) ///< LSB First
#define MSBFIRST (1) ///< MSB First
// SPIMode
#define SPI_MODE0 (0) ///< CPOL (0, CPHA (0
#define SPI_MODE1 (1) ///< CPOL (0, CPHA (1
#define SPI_MODE2 (2) ///< CPOL (1, CPHA (0
#define SPI_MODE3 (3) ///< CPOL (1, CPHA (1
#define SPI_CPHA (0x01)
#define SPI_CPOL (0x02)
#define SPI_CS_HIGH (0x04)
#define SPI_LSB_FIRST (0x08)
#define SPI_3WIRE (0x10)
#define SPI_LOOP (0x20)
#define SPI_NO_CS (0x40)
#define SPI_READY (0x80)
// SPIClockDivider
#define SPI_CLOCK_DIV65536 (0) ///< 65536 (256us (4kHz
#define SPI_CLOCK_DIV32768 (32768) ///< 32768 (126us (8kHz
#define SPI_CLOCK_DIV16384 (16384) ///< 16384 (64us (15.625kHz
#define SPI_CLOCK_DIV8192 (8192) ///< 8192 (32us (31.25kHz
#define SPI_CLOCK_DIV4096 (4096) ///< 4096 (16us (62.5kHz
#define SPI_CLOCK_DIV2048 (2048) ///< 2048 (8us (125kHz
#define SPI_CLOCK_DIV1024 (1024) ///< 1024 (4us (250kHz
#define SPI_CLOCK_DIV512 (512) ///< 512 (2us (500kHz
#define SPI_CLOCK_DIV256 (256) ///< 256 (1us (1MHz
#define SPI_CLOCK_DIV128 (128) ///< 128 (500ns (= 2MHz
#define SPI_CLOCK_DIV64 (64) ///< 64 (250ns (4MHz
#define SPI_CLOCK_DIV32 (32) ///< 32 (125ns (8MHz
#define SPI_CLOCK_DIV16 (16) ///< 16 (50ns (20MHz
#define SPI_CLOCK_DIV8 (8) ///< 8 (25ns (40MHz
#define SPI_CLOCK_DIV4 (4) ///< 4 (12.5ns 80MHz
#define SPI_CLOCK_DIV2 (2) ///< 2 (6.25ns (160MHz
#define SPI_CLOCK_DIV1 (1) ///< 0 (256us (4kHz
int setSPIWriteBitsPerWord( int spi_fd, int bits );
int setSPIReadBitsPerWord( int spi_fd, int bits );
int setSPIBitOrder( int spi_fd, int order);
int setSPIMaxSpeed(int spi_fd, unsigned int spi_speed);
int setSPIDataMode( int spi_fd, int mode);
int SPItransferOneByte( int spi_fd, unsigned char byteData, int spi_delay, int spi_speed, int spi_bits);
int SPItransferBytes(
int spi_fd
, unsigned char * writeData
, int writeLen
, unsigned char * readBuffer
, int readLen
, int spi_delay
, int spi_speed
, int spi_bits
);
int writeBytesToSPI(
int spi_fd
, unsigned char * writeData
, int writeLen
, int spi_delay
, int spi_speed
, int spi_bits
);
int readBytesFromSPI(
int spi_fd
, unsigned char * readBuffer
, int readLen
, int spi_delay
, int spi_speed
, int spi_bits
);
#define SPI0_PATH "/dev/spidev0.0"
#endif
重点关注上面红颜色的那一行,代表我们使用哪个接口的驱动程序。系统目前只实现SPI0的驱动,如图所示:




 /4
/4 






文章评论(0条评论)
登录后参与讨论