
CANoe作为全球知名的总线仿真测试工具在汽车行业得到了广泛应用,与此同时,CANoe在ECU测试领域也不断扩展,基于VT的自动化测试方案在车身域的ECU领域也早已成为了主流。
借助于不同的软件接口和第三方标准接口协议FMI (Functional Mock-up Interface,功能模拟接口),CANoe得到更深入的应用,不仅能支持从MIL到SiL到HIL的不同测试阶段,同时也能支持各种常用的车辆动力学模型(如TESIS公司的DYNA4、IPG公司的CarMaker、MSC公司的Adams/Car),进行ADAS等领域的ECU测试。
北汇信息作为 Vector 在中国的合作伙伴,将为客户提供全方位的支持和高效的测试解决方案。
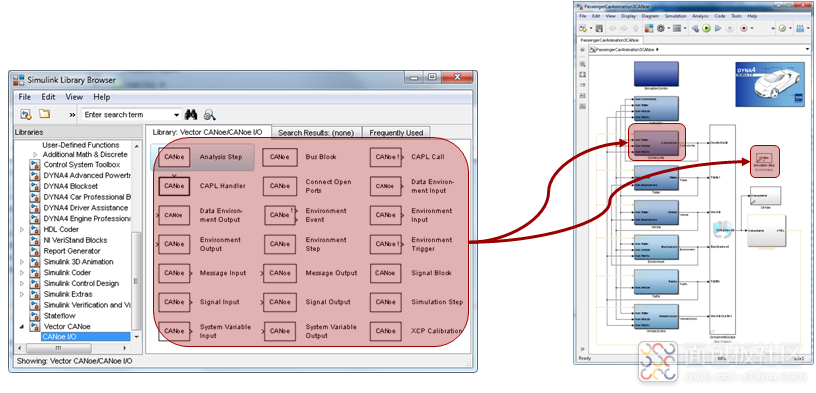
CANoe与Simulink的接口
只需将CANoe提供的“CANoe MATLAB Integration Package”安装到所支持的MATLAB版本下,CANoe的应用层(CANoe IL)便可借助Simulink中的CANoe blockset直接访问模型中的信号,此时Simulink模型可视为CANoe中的一个CAPL节点,可以通过编译生成支持CANoe的动态链接库DLL实现在CANoe中仿真。然后将DYNA4模型生成动态链接库DLL,只需通过一个简单的按钮就可实现无缝导入作为CANoe中的仿真节点。而DYNA4的优势在于其基于Simulink的模型与模型参数化是独立的,可以从DYNA4框架快速实现针对不同车型,不同路况(测试用例)的模型参数调整。其余总线仿真可以通过CANoe实现,例如,通过启动面板上的指示灯开关。这样,带道路和交通情景的驾驶任务在DYNA4中完成了准备和管理,它将从测试管理工具开始,在ECU算法测试发生时作为场景。
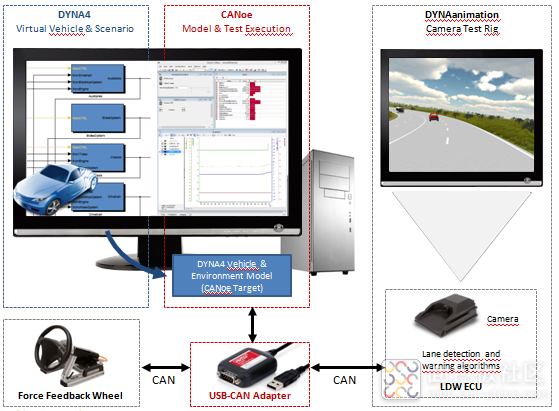
下图这个演示系统展示的是在一个HiL测试环境下的基于摄像头的LDW控制单元测试。CANoe用于执行所有仿真,并且通过USB-CAN-Adapter作为所有硬件的接口;DYNA4用于生成在特定道路下行驶的车辆模型以及环境模型,所生成的道路及环境动画将在显示器中显示;LDW ECU(包括摄像头)作为硬件并且放在显示器前,这样它可以拍摄到显示器中的虚拟路况,LDW ECU处理这些图像信息,并在车辆偏离车道时通过CAN总线发出警告。
如果检测到意外的车道偏离,振动反馈将通过CAN总线从CANoe发送到方向盘,向司机发出警告。
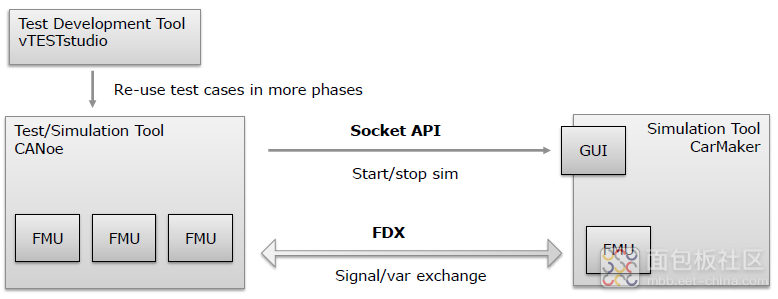
CANoe支持FMI
FMI是一个独立的工具,可用于不同厂商的工具之间交换仿真模型(Functional Mock-up Units – FMU,功能模拟单元),实现CANoe和其它仿真工具(如CarMaker,Adams/Car等)之间的协同仿真。FMU是黑盒模型,有助于保护模型所有者的知识产权。
对于整车厂而言,可以在早期就对供应商提交的FMU方式的应用软件进行验证,也可以对于FMU进行标定。
对于CANoe的使用者来说,可以将开环测试扩展为闭环的功能测试,这时就需要复杂的驾驶环境的模拟。
对于CAE工程师而言,也需要在虚拟的仿真环境中,加载一个仿真的部分或者全部的车辆网络。
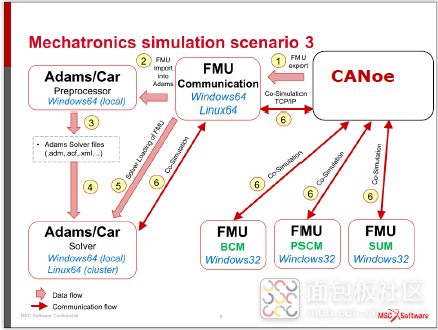
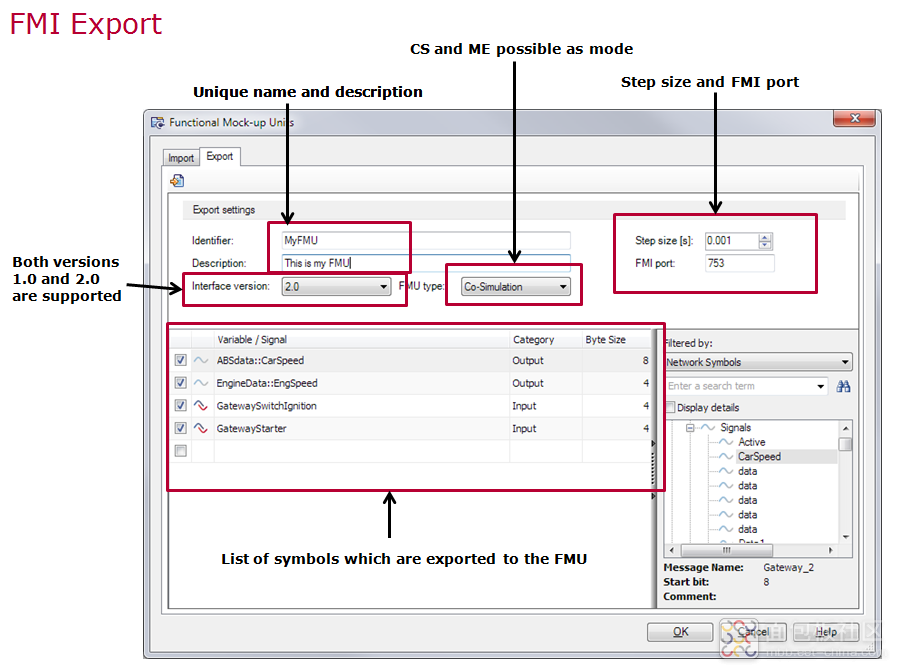
CANoe作为FMU导出
目的:提供一种工具耦合
可以在选择需要导出的信号或系统变量;CANoe和配对的工具都可激活和运行——通过以太网实现数据交换;支持FMI 1.0 和 2.0。
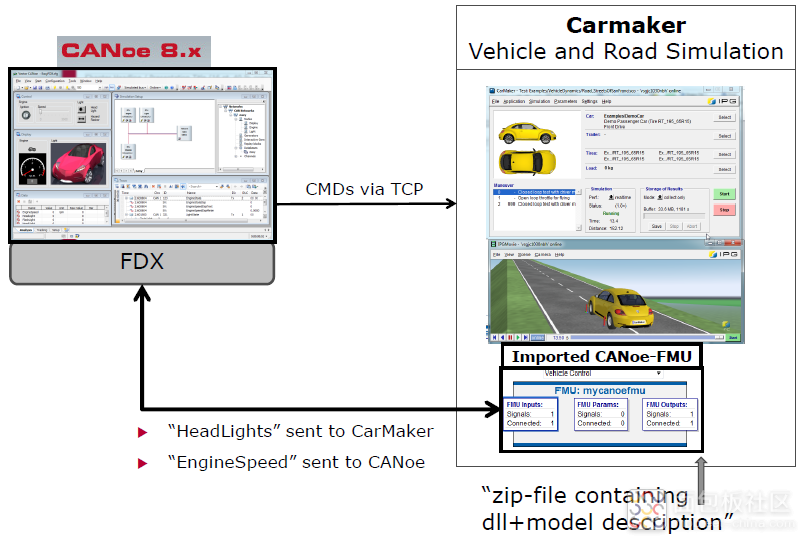
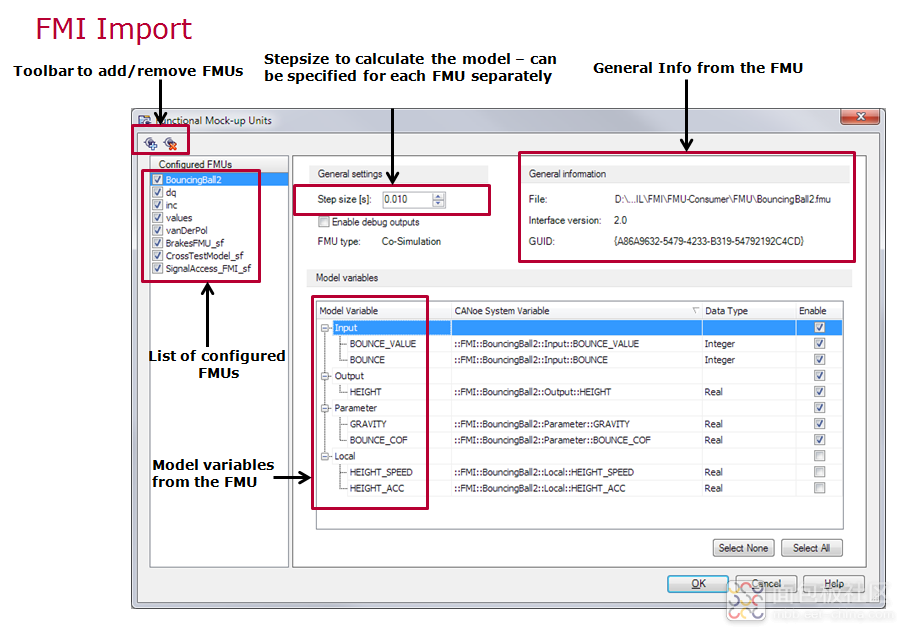
FMU导入CANoe(支持8.5 SP3及以上)
目的:用CANoe加载和执行不同来源的模型
输入、输出或参数映射到系统变量;支持针对联合仿真的FMUs,不支持针对模型交换的FMUs;使用XCP标定FMU;CANoe的仿真步骤支持离线模式;支持FMI 1.0 和 2.0。
作者: 北汇信息, 来源:面包板社区
链接: https://mbb.eet-china.com/blog/uid-me-3998886.html
版权声明:本文为博主原创,未经本人允许,禁止转载!




 /3
/3 






文章评论(0条评论)
登录后参与讨论